1.本发明涉及一种用于控制多部行车协同作业的方法,属于冶金自动控制方法技术领域。
背景技术:
2.工厂仓库对于物料的管理跟踪,诸如钢卷、板材、型材、废钢等,大多是采用行车进行控制管理,然而由于各种因素的影响,包括作业环境恶劣、人为技术差别大、产品防磕碰等,有人驾驶已经无法满足工厂控制的需求,随着智能化技术的发展,工厂仓库对于行车的无人驾驶自动控制需求越来越大。仓库内部物料的作业管理业务种类繁多,单部行车无法满足生产控制的需求,需要多部行车进行协同管理,从而支撑不同的业务需求,这样势必出现作业交叉,行车之间作业范围相互重叠,如果无法对此进行有效的管理控制,则会导致交叉作业的行车相互等待,甚至卡死现象,作业效率低下,影响生产节奏,因此,急需我们对这种冲突作业进行有效的管理控制,从而实现行车无人驾驶自动控制,保证工厂仓库内部行车有条不紊的正常运行。
技术实现要素:
3.本发明目的是提供一种用于控制多部行车协同作业的方法,通过对有可能出现冲突作业的行车预先进行有效分配控制,实现对无人行车下发合理唯一的指令,此方法通过与无人驾驶系统进行通讯,获取无人驾驶系统的作业工单和当前行车的实时状态,确认当前库区无人驾驶行车作业数量并计算当前行车与相邻行车的距离,根据作业工单的初次优先级进行作业模式的分配,计算获得行车的作业指令结果,并实时更新行车优先级,循环进行计算,实时更新行车的作业指令结果,下发至无人驾驶执行系统,实现避免作业冲突,减少作业等待,逻辑简单清晰,控制效率高效,适用范围广,适用于各种仓库的多行车作业控制,有效地解决了背景技术中存在的上述问题。
4.本发明的技术方案是:一种用于控制多部行车协同作业的方法,包含以下步骤:(1)读取数据,配置行车基本数据;(2)根据工单池中的各部行车的工单时间优先级进行初次排序;(3)根据初次排序结果生成控制模式,根据生成的控制模式分别计算分配每部行车的运行指令并进行各部行车指令的确认;(4)最终模式确认并生成最终决策指令,根据各部行车初次排序结果及行车当前作业工单的运行状态,确认是否有需要特殊处理的工单,如果有特殊工单,重新排序,重新确认模式,生成最终决策指令。
5.所述步骤(1)中,包含读取行车运行的实时状态数据;读取行车工单数据;开辟对应的内存空间,保存相应数据。
6.所述步骤(2)中初次排序的工单时间优先级可以根据使用要求进行确定,也可以由仓库的库管或工艺人员要求进行确定。
7.所述步骤(4)中的特殊工单,包括如果初次根据时间计算的结果是避让,避让的过程中经过放吊位,那么重新排优先级,重新计算;对于已经处于运动中的行车,需要提升其
优先级,重新进行计算。
8.所述步骤(4)的最终决策指令,包含ld:左执行工单,rd:向右执行工单 lbd:向左执行避让工单,rbd:向右执行避让工单,lw:等待向左工单,rw:等待向右工单,i:无任务工单和bw:避让等待工单。
9.本发明的有益效果是:通过对有可能出现冲突作业的行车预先进行有效分配控制,实现对无人行车下发合理唯一的指令,此方法通过与无人驾驶系统进行通讯,获取无人驾驶系统的作业工单和当前行车的实时状态,确认当前库区无人驾驶行车作业数量并计算当前行车与相邻行车的距离,根据作业工单的初次优先级进行作业模式的分配,计算获得行车的作业指令结果,并实时更新行车优先级,循环进行计算,实时更新行车的作业指令结果,下发至无人驾驶执行系统,实现避免作业冲突,减少作业等待,逻辑简单清晰,控制效率高效,适用范围广,适用于各种仓库的多行车作业控制。
附图说明
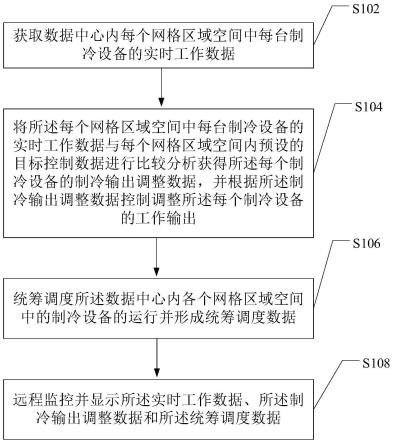
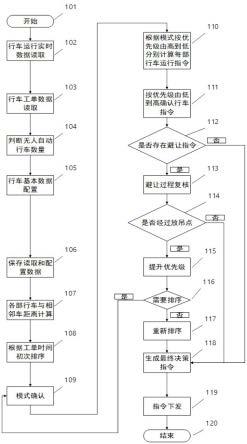
10.图1是本发明的系统组成结构图;图2是本发明计算方法的流程图。
具体实施方式
11.为了使发明实施案例的目的、技术方案和优点更加清楚,下面将结合实施案例中的附图,对本发明实施案例中的技术方案进行清晰的、完整的描述,显然,所表述的实施案例是本发明一小部分实施案例,而不是全部的实施案例,基于本发明中的实施案例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施案例,都属于本发明保护范围。
12.一种用于控制多部行车协同作业的方法,包含以下步骤:(1)读取数据,配置行车基本数据;(2)根据工单池中的各部行车的工单时间优先级进行初次排序;(3)根据初次排序结果生成控制模式,根据生成的控制模式分别计算分配每部行车的运行指令并进行各部行车指令的确认;(4)最终模式确认并生成最终决策指令,根据各部行车初次排序结果及行车当前作业工单的运行状态,确认是否有需要特殊处理的工单,如果有特殊工单,重新排序,重新确认模式,生成最终决策指令。
13.所述步骤(1)中,包含读取行车运行的实时状态数据;读取行车工单数据;开辟对应的内存空间,保存相应数据。
14.所述步骤(2)中初次排序的工单时间优先级可以根据使用要求进行确定,也可以由仓库的库管或工艺人员要求进行确定。
15.所述步骤(4)中的特殊工单,包括如果初次根据时间计算的结果是避让,避让的过程中经过放吊位,那么重新排优先级,重新计算;对于已经处于运动中的行车,需要提升其优先级,重新进行计算。
16.所述步骤(4)的最终决策指令,包含ld:左执行工单,rd:向右执行工单 lbd:向左执行避让工单,rbd:向右执行避让工单,lw:等待向左工单,rw:等待向右工单,i:无任务工单和bw:避让等待工单。
17.在实际应用中,本发明将行车进行编码,然后按照优先级进行排序,确认控制模
式,比如两部行车,按优先级高低组合后的控制模式为ab,3部车则为abc,以此类推。至于优先级的排序,初次是以行车作业工单的时间来进行排序,循环的过程中,需要考虑行车本身的状态,对于已经运动的行车,提升其优先级至最高;对于需要避让的行车,若在避让的行进路径中会经过行车的目标位置,则把其优先级也提高一级,最终计算出作业指令结果,结果包括ld:向左执行工单 rd:向右执行工单 lbd:向左执行避让工单 rbd:向右执行避让工单 lw:等待向左工作 rw:等待向右工作 i:无任务 bw:避让等待。
18.包含如下步骤:
①
读取数据,配置行车基本数据;1.1读取行车运行的实时状态数据;1.2读取行车工单池数据;1.3开辟对应的内存空间,保存相应数据;
②
初次排序;2.1确定各行车工单的时间优先级;2.2计算各行车与相邻左右行车的距离;2.3按时间进行初次排序;
③
多行车控制模式确认;3.1根据初次排序结果生成控制模式;3.2根据生成的控制模式进行各部行车指令的确认并生成初次结果;
④
最终模式确认并生成行车决策指令;4.1根据各部行车初次结果及行车当前作业工单的运行状态,确认是否有需要特殊处理的工单,对于f工单,如果初次根据时间计算的结果是避让,避让的过程中经过放吊位,那么重新排优先级,重新计算;4.2如果有特殊工单,重新排序,重新确认模式,生成最终决策指令。
19.本发明详细的创建步骤如下:步骤101、开始计算;步骤102和步骤103、根据工厂状态,读取生产运行过程中的行车实时数据和行车工单池中的工单数据,建立相应的内存数据结构,并把数据存储到内存数据结构中;步骤104、根据读取到的行车实时数据,计算当前无人运行的行车数量,以备进行模式配置时使用;步骤105和步骤106、将步骤102、步骤103、步骤104中读取和计算的数据进行基本配置和保存;步骤107、根据计算得到的自动运行行车数量,分别计算每部行车与左右相邻行车之间的实时距离;步骤108、根据工单池中每部行车的分配工单时间,进行初次优先级排序;步骤109、根据步骤108计算的排序,进行初次行车协同作业模式确认;步骤110、根据步骤109计算的作业模式,分别计算每部行车的作业指令;步骤111、步骤112、步骤113、步骤114和步骤115、根据步骤109和110计算的计算每部行车的作业指令及作业模式,按优先级由低到高检查行车有无避让工单,有避让时,预计算避让行进过程中是否经过此行车的放吊点,如果满足,那么需要重新调整行车作业模式
和重新生成作业指令;步骤116、根据步骤115提升后的优先级顺序,返回109,重复计算作业模式,并生成新的作业指令,直到生成最终决策指令;步骤117、步骤118、重新排序,计算生成每部行车的最终决策指令;步骤119、向行车执行系统下发指令。
20.步骤120、计算结束。
21.综上所述,本发明能够很好的解决工厂仓库多部行车冲突作业情况,对涉及到的冲突作业进行合理有效的优化配置,避免行车冲突碰撞,减少行车不必要的等待时间,提高生产运行效率。另外需要说明的是,虽然如上参照图例对根据本发明进行的实施例进行了描述,但是本领域技术人员应当理解,在不脱离本发明内容的基础上,还可以对实施例进行各种改进。因此,本发明的保护范围应当有所附的权利要求书的内容确定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。