技术特征:
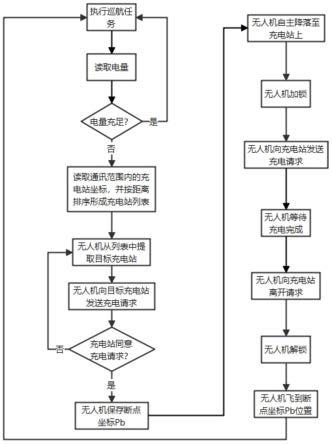
1.一种多旋翼无人机自主巡航及充电的控制方法,其特征在于,所述控制方法包括以下步骤:s1、无人机根据内部存储的航线,按航线执行巡航任务;s2、读取无人机电量,若电量充足,跳转至所述步骤s1,若电量不足,则执行所述步骤s3;s3、无人机读取在通讯范围内的所有充电站的坐标,将无人机与各个充电站的距离按照从近到远的顺序排序,形成充电站列表;s4、无人机保存当前巡航任务的断点坐标pb;s5、无人机从充电站列表中依次取出目标充电站,同时向目标充电站发出充电请求,若该目标充电站无空闲充电位置,则该目标充电站回复无人机拒绝充电的请求,然后从充电站列表中取下一个目标充电站,无人机继续发送请求,直至有充电站同意充电请求,同时保存该充电站的坐标pt,则无人机执行所述步骤s6;s6、无人机自动飞到坐标pt处的上方,并由视觉引导精准降落在充电平台上;s7、无人机加锁;s8、无人机向目标充电站发送充电请求,目标充电站收到充电请求后自动向无人机充电;s9、无人机不断读取充电状态,等待充电完成;s10、无人机向目标充电站发送离开请求,等待充电站同意,充电站收到请求后,将机械臂回收到仓内,然后充电站向无人机发送同意离开的指令;s11、无人机解锁;s12、无人机飞到断点坐标pb位置;s13、无人机继续从断点处继续执行巡航任务,跳转至所述步骤s1。2.如权利要求1所述的多旋翼无人机自主巡航及充电的控制方法,其特征在于,在所述步骤s1中,无人机内部存储的航线通常是在起飞前由操作人员通过地面站上传,并在整个巡航任务中一直保存在飞控内部。3.如权利要求1所述的多旋翼无人机自主巡航及充电的控制方法,其特征在于,步骤s2中,当无人机电量不足以飞至充电站时,解决方案:实时读取自身电量以及无人机与周边各充电站之间的距离,电量不足的判断条件是:通过剩余电量估计无人机可以飞行的距离,若此距离小于无人机与邻近充电站之间的最大距离,即视为电量不足;所述邻近充电站指的是无人机通讯范围内的充电站。4.如权利要求3所述的多旋翼无人机自主巡航及充电的控制方法,其特征在于,在所述步骤s2中,飞控读取电池的剩余电量,若电量充足,则继续执行巡航任务,当电量不足时,则执行所述步骤s3。5.如权利要求4所述的多旋翼无人机自主巡航及充电的控制方法,其特征在于,在所述步骤s3中,飞控通过无线链路连接通讯范围内的所有充电站,读取他们的地理坐标,并根据无人机当前的位置,计算无人机与各个充电站的距离,然后根据距离由近到远进行排序,形成充电站列表。6.如权利要求5所述的多旋翼无人机自主巡航及充电的控制方法,其特征在于,在所述步骤s4中,飞控从充电站列表中,取出最靠前的充电站作为目标充电站,并向该充电站发出
充电请求,若该充电站同意请求,则无人机前往该充电站充电,若该充电站拒绝请求,则无人机从充电站列表中,取出下一个充电站作为目标充电站,然后继续执行此步骤,直到有充电站同意请求。7.如权利要求6所述的多旋翼无人机自主巡航及充电的控制方法,其特征在于,充电站是否同意无人机的充电请求,是根据该充电站内是否有空闲的可用的充电位数目决定的,若有则同意请求,若无则拒绝请求。8.如权利要求7所述的多旋翼无人机自主巡航及充电的控制方法,其特征在于,步骤s5中,若通讯范围内的所有充电站均不同意充电请求,则无人机就近降落等待并继续循环执行s5直至有充电站同意充电为止。9.如权利要求8所述的多旋翼无人机自主巡航及充电的控制方法,其特征在于,进一步地,当充电站同意了其中一个无人机的充电请求,不论无人机是否到达该充电站,充电站都要将空闲状态设置为繁忙,否则可能导致最后一个空位刚分配给一架无人机后,立马有另一架无人机发送充电请求时,导致错误的回复。10.如权利要求1所述的多旋翼无人机自主巡航及充电的控制方法,其特征在于,在所述步骤s10中,当充电完成后,无人机向充电站发送离开请求,这时充电站先执行无人机离开前的准备工作,然后再同意其离开。
技术总结
本发明属于多旋翼无人机飞行控制技术领域,具体提出了一种多旋翼无人机自主巡航及充电的控制方法。在多架巡航任务的无人机的航线上布置多台充电站,并使用该方法进行无人机的巡航和自主充电的控制流程,可以满足它们自主完成巡航任务,且无需返回基地充电,即可完成长时间、长里程的巡航;本发明支持多架无人机同时巡航,多台充电站在巡航航线上可以任意布置,无特定场地要求。本发明提出的充电控制方法中,通过无人机与充电站距离关系确判断剩余电量的方法,可以有效避免采用固定阈值确定无人机电量不足导致难以达到充电站的情形。人机电量不足导致难以达到充电站的情形。人机电量不足导致难以达到充电站的情形。
技术研发人员:张学东 曾伟 付立春 马东林 王可心 周亨 余立强 黄志勇 侯祥民 吴令华
受保护的技术使用者:江西神州六合直升机有限责任公司
技术研发日:2022.11.17
技术公布日:2023/3/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。