技术特征:
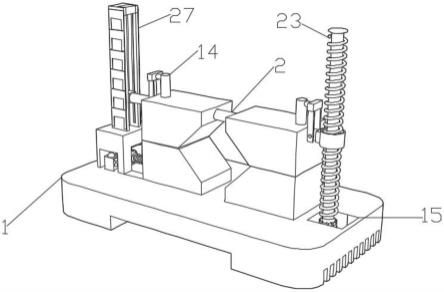
1.一种波峰焊接工装,包括取放模块(1)、焊接模块(2)、引脚切割模块(3)、检测模块(4)、转盘(5),其特征在于,所述取放模块(1)对待焊接的产品治具件进行夹取后转移至转盘(5)上;所述转盘(5)上承载有若干组承载座(51),通过承载座(51)用于对治具件的承载,通过转盘(5)自身的旋转将承载座(51)依次转运至焊接模块(2)、引脚切割模块(3)、检测模块(4)所在工位的下方;所述焊接模块(2)包括注焊剂添加组件(21)、第一抓手(22)、焊接组件(23)、第二抓手(24),所述第一抓手(22)用于对位于承载座(51)上的治具件进行夹取,并置于焊剂添加组件(21)上进行焊剂的添加,随后转运至焊接组件(23)所在的工位上,通过第二抓手(24)进行夹取焊接作业;所述引脚切割模块(3)用于对治具件的引脚进行裁切;所述检测模块(4)对裁切后的治具件进行视觉检测,随后通过取放模块(1)转出。2.根据权利要求1所述的波峰焊接工装,其特征在于,所述焊接模块(2)、引脚切割模块(3)、检测模块(4)分别位于转盘(5)所在的外侧边,并通过转盘(5)的转动,实现位于转盘(5)上的承载座(51)转运至每个模块工位所在的下方位置。3.根据权利要求2所述的波峰焊接工装,其特征在于,所述第一抓手(22)设置有前后以及左右方向的驱动,用于对夹持的治具件进行位置调节和转移,使治具件的底部引脚与焊剂添加组件(21)内的焊剂接触后再转运至转盘(5)的承载座(51)上,随后再转运至对应的承载座(51)上承载。4.根据权利要求2所述的波峰焊接工装,其特征在于,所述第二抓手(24)设置有前后以及左右方向的驱动,用于对夹持的治具件进行位置调节和转移,使治具件的底部引脚接触到焊接组件(23)的槽内,并在通电状态下实现焊接作业,随后再转运至对应的承载座(51)上承载。5.根据权利要求1所述的波峰焊接工装,其特征在于,所述引脚切割模块(3)设置有两组,通过两组引脚切割模块(3)分别对承载座(51)上的治具件上两组引脚进行切割。6.根据权利要求1所述的波峰焊接工装,其特征在于,所述检测模块(4)通过侧边设置的第三抓手(41)对位于承载座(51)上的治具件进行夹取,随后进行视觉检测,检测完成后对该治具件进行标记,随后再重新放回至承载座(51)上。7.根据权利要求1所述的波峰焊接工装,其特征在于,位于所述取放模块(1)所在的下方位置设置有产品缓存区(101)以及废料回收区(102)。
技术总结
本实用新型公开了一种波峰焊接工装,取放组件对待焊接的产品治具件进行夹取后转移至转盘上;转盘上承载有若干组承载座,通过承载座用于对治具件的承载;焊接模块包括注焊剂添加组件、第一抓手、焊接组件、第二抓手,所述第一抓手用于对位于承载座上的治具件进行夹取,并置于焊剂添加组件上进行焊剂的添加,随后转运至焊接组件所在的工位上,通过第二抓手进行夹取焊接作业;引脚切割模块用于对治具件的引脚进行裁切。可实现将待加工的治具件进行焊接完成后,直接进行引脚位置的切割,最后再进行检测,这种焊接方式能够实现将治具件的快速焊接并去除多余的引脚,提高敢接效率。提高敢接效率。提高敢接效率。
技术研发人员:周永 游洪波
受保护的技术使用者:苏州市朗电机器人有限公司
技术研发日:2022.10.10
技术公布日:2023/3/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。