1.本发明涉及一种驱动装置,其具有至少一个马达和至少一个另外的驱动组件,该另外的驱动组件选自于传动装置、转矩变换器、联接器和/或制动器的群组,并且还具有控制装置,该控制装置被构造用于自动操控至少一个马达。本发明还涉及一种具有至少一个这种驱动装置的机器人。
背景技术:
2.专利文献wo2015/067623a2描述了一种工业机器人,其具有:机器人控制器,该机器人控制器被构造和/或设置用于执行机器人程序;和带有多个节肢的操纵器臂,这些节肢通过关节连接,这些关节可以根据机器人程序自动地调节或在手动运行中可自动地调节;以及至少一个可由机器人控制器操控的电驱动器,该电驱动器被构造为调节至少一个关节。在此,电驱动器具有:电动马达,该电动马达包括马达壳体、通过至少两个滚动轴承可转动安装的驱动轴、固定在马达壳体中的定子、和与驱动轴连接并可在马达壳体中转动的转子;以及应力轴传动装置,该应力轴传动装置包括传动装置壳体、具有内齿的刚性外环、具有外齿的柔性从动套筒(abtriebsb
ü
chse)、和在传动装置壳体中可转动的、在柔性从动套筒上滚动的轴发生器(wellengenerator),其中,柔性从动套筒的外齿根据轴发生器的转动运动与刚性外环的内齿啮合,并且其中,转子被紧固在驱动轴上,并且所述至少两个滚动轴承中的第一滚动轴承布置在柔性从动套筒内部并且被构造为使驱动轴可转动地安装在传动装置壳体中。
技术实现要素:
3.本发明的目的在于提供一种驱动装置或者一种具有至少一个这种驱动装置的机器人,其能够以特别低的磨损设计实现节能运行。
4.本发明的目的通过一种驱动装置来实现,该驱动装置具有至少一个马达和至少一个另外的驱动组件,该另外的驱动组件选自于传动装置、转矩变换器、联接器(kupplung)和/或制动器的群组;以及具有控制装置(steuervorrichtung),该控制装置被构造用于自动操控至少一个马达,其中至少一个马达和/或至少一个另外的驱动组件具有改变转矩传递的控制器件(steuermittel),该控制器件包括至少一个发光元件和影响转矩传递的物质(werkstoff),该物质具有至少一种光稳定动态材料(lsdm),其中控制器件被设计为,通过操控照射到光稳定动态材料(lsdm)的发光元件来改变转矩传递。
5.所述至少一个另外的驱动组件可以是至少一个传动装置、至少一个转矩变换器、至少一个联接器和/或至少一个制动器。根据本发明的驱动装置可以单独地或以多种形式使用在任何待驱动的装置、机器或设备上。
6.在一种可能的实施方式中,能够特别适合地使用至少一个根据本发明的这种驱动装置的装置可以特别是机器人。据此,该机器人可以包括机器人臂、机器人控制器和至少一个根据本发明的驱动装置。
7.通常,例如机器人臂的每个关节都配属有一组驱动组件,也就是说,机器人臂的每个关节就此而言可以具有所述驱动组件中的至少一个驱动组件或者具有所述驱动组件中的多个不同或相同类型的驱动组件。例如,机器人臂的一个关节或多个关节可以具有连接到传动装置的马达,其中关节、传动装置和/或马达可以配有制动器。传动装置例如在必要时也可以具有联接器和/或转矩变换器。
8.根据本发明的改变转矩传递的控制器件可以不失一般性地在所有适用的装置中选择性地应用于所述驱动组件中的一个、所述驱动组件的多个、特别是不同的驱动组件中,甚或是应用在所有现有的驱动组件中。
9.在一种基本的实施变型中,所述改变转矩传递的控制器件可以被构造为,在第一切换状态下完全允许转矩传递,并且在第二切换状态下完全禁止转矩传递。在联接器或转矩变换器的情况下,禁止转矩传递可以是完全断开(trennen),从而在这种状态下根本不传递转矩。然而替代地,禁止转矩传递在不同的理解下例如也可以是锁止转矩传递,例如在制动器的情况下是通过以下方式实现禁止转矩传递:即,实际用来传递、即传导转矩的轴被锁止,也就是被停止(festgestellt)或夹住(festgehalten),使轴不再能够转动,并因此不再能够传递转矩。在这种情况下,转矩例如由壳体来承担(abgest
ü
tzt)。
10.所述改变转矩传递的控制器件可以例如具有恰好两个切换状态,即,所描述的完全传递转矩的状态和完全禁止传递转矩的状态。
11.替代地,所述改变转矩传递的控制器件也可以具有多于两个的状态,特别是转矩传递状态也可以连续地或线性地改变,并且因此可以是可连续变化的。在这种情况下,该控制器件可以改变待传递转矩的大小。
12.可以选择性地接通或关闭发光元件,以便改变或变换转矩传递状态。然而,发光元件也可以被构造为变化地改变其光度或者说亮度的大小。就此而言,发光元件可以被构造为可调光的。据此,发光元件可以选择性地强发光、弱发光或不发光。
13.为了能够通过所述至少一个发光元件来影响转矩传递,根据本发明提供影响转矩传递的物质,其具有至少一种光稳定动态材料(lsdm)。
14.光稳定动态材料(lsdm)是已知的。例如,作者hannes a.houck、eva blasco、filip e.du prez和christopher barner-kowollik在标题为“光稳定动态材料(light-stabilised dynamic materials)”的出版物(“支持信息文件(supporting information file)”)中描述了具有这种性质的化合物和组合物,并且这种化合物和组合物在本领域中已经被称为“光稳定动态材料(lsdm)”。
15.光学活化聚合物可以例如通过紫外光从液相转化为稳定的固相。在研究中,这些过程在实验室中已经是可逆的。一旦光源被停用,该材料就会再次液化。在实验室中也正在开发反向过程,其中液体材料在光作用下固化。
16.根据本发明,借助于这种可光活化的物质,可以在驱动技术中普遍地并且特别是在机器人技术中开发例如新型的制动器,该制动器至少对于保持任务(halteaufgaben)具有无可比拟的低磨损,并且实现了可用性和耐久性的新维度。此外,所使用的制动使能能量可以明显更低。
17.发光元件可以优选被电操控。此外,可以优选使用用电发光的发光元件。对发光元件的操控也可以通过以下方式进行:向发光元件供电使其发光,或者断电使发光元件不再
发光。
18.因此,在光稳定动态材料(lsdm)的情况下,只要用光对其进行照射,物质就保持固体。然而,如果关闭发光元件,即光稳定动态材料(lsdm)不再被光照射,则其就会再次液化。这种过程可以在固化与液化之间无限制地交替进行。
19.根据本发明,普遍需要其中存在光稳定动态材料(lsdm)的壳体。被设置用于传递转矩的至少一个轴或多个轴突出到这种填充有光稳定动态材料(lsdm)的空间或腔室中。所述至少一个轴或多个轴并在必要时还有所述壳体或所述空间或所述腔室承载着传递结构,该传递结构沉入到光稳定动态材料(lsdm)中。如果光稳定动态材料(lsdm)由于缺乏光照射而处于其液态状态,则传递结构可以在液体中运动,并且所导入的转矩的传递不再能够进行或者只能有限程度地进行。如果光稳定动态材料(lsdm)由于发生光照射而处于其固态状态,则传递结构在其中不再能够运动,并因此与固化的、即现在刚性的光稳定动态材料(lsdm)形状配合地连接。因此,所导入的转矩的传递在此状态下可以不受限制地进行。特别是在作为联接器或转矩变换器的实施方式中,可以利用光稳定动态材料(lsdm)在固态与液态之间的过渡状态,以便能够受控大小地传递转矩和/或能够允许转矩受控地提高或降低。
20.所述改变转矩传递的控制器件可以配属于至少一个制动器,其中制动器具有制动构件,该制动构件被转矩联接到对应的马达并且可转动地安装在制动器的制动器壳体中,该制动构件具有第一制动传递结构,并且制动器壳体具有第二制动传递结构,其中第一制动传递结构通过具有至少一种光稳定动态材料(lsdm)的物质与第二制动传递结构相接触,以便根据由发光元件照射到光稳定动态材料(lsdm)中的光来控制第一制动传递结构与第二制动传递结构之间的转矩传递。
21.所述可转动安装的制动构件可以例如是应被受控制动的轴的一部分。该轴可以例如与马达、特别是机器人臂的马达的马达轴联接,或者该轴可以直接是马达轴。就此而言,该可转动安装的制动构件可以被构造为类似于制动盘并且具有第一制动传递结构。
22.第一制动传递结构应该被构造和布置为:在光稳定动态材料(lsdm)的液态状态下,第一制动传递结构允许制动构件至少在很大程度上甚或是完全地自由转动;并且在光稳定动态材料(lsdm)的固态状态下,第一制动传递结构至少在很大程度上或者完全地与固态的光稳定动态材料(lsdm)形状配合连接。就此而言,第一制动传递结构可以例如由接片状、肋状、波浪状和/或叶片状的突起构成。
23.第二制动传递结构可以布置在制动器壳体的内壁中。就此而言,它们是类似于第一制动传递结构地延伸到光稳定动态材料(lsdm)中。第二制动传递结构同样应该被构造和布置为:在光稳定动态材料(lsdm)的液态状态下,第二制动传递结构允许制动构件至少在很大程度上甚或甚或完全地自由转动;并且在光稳定动态材料(lsdm)的固态状态下,第二制动传递结构至少在很大程度上或者完全地与固态的光稳定动态材料(lsdm)形状配合连接。就此而言,第二制动传递结构可以例如由接片状、肋状、波浪状和/或叶片状的突起构成。
24.所述改变转矩传递的控制器件可以配属于驱动装置的至少一个联接器、特别是机器人的联接器,其中联接器具有第一联接构件,该第一联接构件被转矩联接到对应的马达并且被可转动地安装在联接器的联接器壳体中,该第一联接构件具有第一联接传递结构;并且联接器具有可转动地安装在联接器的联接器壳体中的第二联接构件,该第二联接构件
具有第二联接传递结构,其中第一联接传递结构与第二联接传递结构通过具有至少一种光稳定动态材料(lsdm)的物质相接触,以便根据由发光元件照射到光稳定动态材料(lsdm)中的光来控制第一联接传递结构与第二联接传递结构之间的转矩传递。
25.第一联接传递结构和第二联接传递结构应该被构造和布置为:在光稳定动态材料(lsdm)的液态状态下,第一联接传递结构和第二联接传递结构允许第一联接构件和第二联接构件至少在很大程度上甚或完全地自由转动;并且在光稳定动态材料(lsdm)的固态状态下,第一联接传递结构和第二联接传递结构至少在很大程度上或者完全地与固态的光稳定动态材料(lsdm)形状配合连接。就此而言,第一联接传递结构和第二联接传递结构可以例如由接片状、肋状、波浪状和/或叶片状的突起构成。
26.所述改变转矩传递的控制器件可以配属于驱动装置的至少一个转矩变换器、特别是机器人的转矩变换器,其中转矩变换器具有第一变换构件,该第一变换构件被转矩联接到对应的马达并且被可转动地安装在转矩变换器的变换器壳体中,该第一变换构件具有第一变换传递结构;并且转矩变换器具有可转动安装在转矩变换器的变换器壳体中的第二变换构件,该第二变换构件具有第二变换传递结构;并且变换器壳体具有第三变换传递结构,其中第一变换传递结构通过具有至少一种光稳定动态材料(lsdm)的物质与第二变换传递结构和第三变换传递结构相接触,以便根据由发光元件照射到光稳定动态材料(lsdm)中的光来控制在第一变换传递结构与第二变换传递结构之间的转矩传递。
27.第一变换传递结构、第二变换传递结构和第三变换传递结构应该被构造和布置为:在光稳定动态材料(lsdm)的液态状态下,第一变换传递结构、第二变换传递结构和第三变换传递结构允许第一变换构件和第二变换构件至少在很大程度上甚或完全地自由转动;并且在光稳定动态材料(lsdm)的固态状态下,第一变换传递结构、第二变换传递结构和第三变换传递结构至少在很大程度上或者完全地与固态的光稳定动态材料(lsdm)形状配合连接。就此而言,第一变换传递结构、第二变换传递结构和第三变换传递结构可以例如由接片状、肋状、波浪状和/或叶片状的突起构成。
28.所述改变转矩传递的控制器件可以配属于驱动装置的至少一个传动装置、特别是机器人的传动装置,其中传动装置具有传动构件,该传动构件被转矩联接到对应的马达并被可转动地安装在传动装置的传动装置壳体中,该传动构件具有第一传动传递结构,并且在传动装置壳体中布置有至少一个传动级该传动级具有第二传动传递结构,其中,第一传动传递结构与第二传动传递结构通过具有至少一种光稳定动态材料(lsdm)的物质相接触,以便根据由发光元件照射到光稳定动态材料(lsdm)中的光来控制第一传动传递结构与第二传动传递结构之间的转矩传递。
29.第一传动传递结构和第二传动传递结构应该被构造和布置为:在光稳定动态材料(lsdm)的液态状态下,第一传动传递结构和第二传动传递结构允许相应的传动构件至少在很大程度上甚或完全地自由转动;并且在光稳定动态材料(lsdm)的固态状态下,第一传动传递结构和第二传动传递结构至少在很大程度上或者完全地与固态的光稳定动态材料(lsdm)形状配合连接。就此而言,第一传动传递结构和第二传动传递结构可以例如由接片状、肋状、波浪状和/或叶片状的突起构成。
30.所述改变转矩传递的控制器件可以配属于至少一个马达,其中所述至少一个马达具有转矩构件,该转矩构件被转矩联接到对应的马达轴并被可转动地安装在马达的马达壳
体中,该转矩构件具有第一马达转矩传递结构,并且马达轴具有第二马达转矩传递结构,其中第一马达转矩传递结构通过具有至少一种光稳定动态材料(lsdm)的物质与第二马达转矩传递结构相接触,以便根据由发光元件照射到光稳定动态材料(lsdm)中的光来控制第一马达转矩传递结构与第二马达转矩传递结构之间的转矩传递。
31.第一马达转矩传递结构和第二马达转矩传递结构应该被构造和布置为:在光稳定动态材料(lsdm)的液态状态下,第一马达转矩传递结构和第二马达转矩传递结构允许相应的转矩构件至少在很大程度上甚或完全地自由转动;并且在光稳定动态材料(lsdm)的固态状态下,第一马达转矩传递结构和第二马达转矩传递结构至少在很大程度上或者完全地与固态的光稳定动态材料(lsdm)形状配合连接。就此而言,第一马达转矩传递结构和第二马达转矩传递结构可以例如由接片状、肋状、波浪状和/或叶片状的突起构成。
32.在驱动组件的所有实施方式中,至少一个发光元件可以分别是布置在制动器壳体内部、联接器壳体内部、变换器壳体内部、传动装置壳体内部和/或马达壳体内部的led,它们被从外部电操控。
33.发光元件、特别是led可以成组地布置,例如成排、成行或成簇地布置,并且特别是在其数量、位置和布置方面与相应的传递结构,即第一和第二制动传递结构、第一和第二联接传递结构、第一、第二和第三变换传递结构、第一和第二传动传递结构和/或第一和第二马达转矩传递结构相匹配。
34.在驱动组件的所有实施方式中,至少一个发光元件可以分别是布置在透光的制动器壳体外部、透光的联接器壳体外部、透光的变换器壳体外部、透光的传动装置壳体外部和/或透光的马达壳体外部的led,在此,由至少一个led发出的光从外部照射到光稳定动态材料(lsdm)中。
35.在外置的发光元件、特别是led的情况下,这些发光元件可以成组地布置,例如成排、成行或成簇地布置,并且特别是在其数量、位置和布置方面与相应的传递结构,即第一和第二制动传递结构、第一和第二联接传递结构、第一、第二和第三变换传递结构、第一和第二传动传递结构和/或第一和第二马达转矩传递结构相匹配。
36.如果发光元件、特别led被布置在光稳定动态材料(lsdm)的外部时,则不再需要必须将电导线引入到光稳定动态材料(lsdm)。否则,也可以省略电导线所需的从外部到内部的必要通道。
37.在驱动组件的所有实施方式中,第一和第二制动传递结构、第一和第二联接传递结构、第一、第二和第三变换传递结构、第一和第二传动传递结构和/或第一和第二马达转矩传递结构可以分别具有突起,特别是叶片状或波浪状的突起,这些突起伸入到光稳定动态材料(lsdm)中。
38.这样的突起可以被构造为,改善与处于固态的光稳定动态材料(lsdm)的形状配合连接。替代地或附加地,这种突起可以被构造为,尽可能少地阻碍相应的传递结构在光稳定动态材料(lsdm)的液态状态下在其中的自由运动。
39.在驱动组件的所有实施方式中,制动器壳体、联接器壳体、变换器壳体、传动装置壳体、马达壳体和/或其它的将光稳定动态材料(lsdm)封闭在其中的腔室可以分别配设有向外延伸的冷却肋,或者在腔室的腔室壁中或相应壳体的壳体壁中形成的冷却通道,冷却液在该冷却通道中循环。
40.冷却肋和/或具有冷却液的冷却通道可以被构造为,将来自光稳定动态材料(lsdm)的任何不需要的热能向外排出。
41.本发明的目的还通过一种机器人来实现,该机器人具有机器人臂,该机器人臂具有多个关节和多个节肢,这些节肢能够通过机器人臂的关节的运动而相对于彼此进行调节,其中,为每个被驱动的关节分配根据本发明所述的一种或多种实施方式的驱动装置,并且各个驱动装置被构造为,通过相应地自动操控各个驱动装置的马达来调节分配给它的机器人臂的关节,其中控制装置包括机器人控制器,该机器人控制器被构造为自动操控马达,以便通过关节的被驱动的运动来自动地且相对于彼此单独地调节机器人臂的节肢。
42.据此,本发明的目的可以通过一种机器人来实现,该机器人具有:机器人臂,其具有多个关节和多个节肢,这些节肢能够通过机器人臂的关节的运动而相对于彼此进行调节,其中为每个被驱动的关节分配马达和至少一个另外的驱动组件,该另外的驱动组件选自于传动装置、转矩变换器、联接器和/或制动器的群组,其中,各个马达被构造为,通过对马达的自动操控来调节配属于该马达的关节,并且具有机器人控制器,该机器人控制器被构造为自动操控马达,以便通过关节的被驱动的运动来自动地且相对于彼此单独地调节机器人臂的节肢,其中马达和/或至少一个另外的驱动组件具有改变转矩传递的控制器件,该控制器件具有至少一个上述的发光元件和上述的影响转矩传递的物质,该物质具有至少一种光稳定动态材料(lsdm),其中该控制器件被设计为,通过操控照射到光稳定动态材料(lsdm)的发光元件来改变转矩传递。
附图说明
43.在下面的描述中将参照附图详细阐述本发明的具体实施例。这些示例性实施例的具体特征可以在必要时被单独或组合地考虑作为本发明的一般性特征,而与它们具体在上下文中哪里被提及无关。下面通过机器人的具体实施例来描述本发明。正如在一般性描述部分中所阐述的那样,也可以在非机器人的其它装置、机器和设备中设置单个驱动装置或多个驱动装置。就此而言,在本发明的意义下,在下面的附图说明中所描述的特征不应被直接和排他性地理解为机器人特征,而是被理解为驱动装置的一般性特征,其也可结合其它的装置、机器和设备使用。其中:
44.图1以示意图示出了示例性的机器人以及相关的驱动组件,该机器人具有机器人臂和机器人控制器;
45.图2以示意图示出了处于具有光稳定动态材料的制动器的实施方式中的根据本发明的示例性驱动组件;
46.图3以示意图示出了处于具有光稳定动态材料的联接器的实施方式中的根据本发明的示例性驱动组件;
47.图4以示意图示出了处于具有光稳定动态材料的转矩变换器的实施方式中的根据本发明的示例性驱动组件;
48.图5以示意图示出了处于具有光稳定动态材料的传动装置的实施方式中的根据本发明的示例性驱动组件;和
49.图6以示意图示出了处于具有光稳定动态材料的马达的实施方式中的根据本发明的示意性驱动组件。
具体实施方式
50.图1示出了机器人8,其具有机器人臂9和被构造为机器人控制器10的控制装置10a。在本实施例中,机器人臂9包括多个依次布置并借助关节l1至l6可转动地相互连接的节肢g1至g7。在所示出的实施例中,机器人8包括配属于各个关节l1至l6的驱动装置1。
51.机器人8具有机器人控制器10,该机器人控制器被构造为执行机器人程序并自动移动机器人臂9的节肢g1-g7和关节l1-l6。多个节肢g1-g7中的一个节肢形成机器人臂9的末端节肢(g7),该末端节肢具有工具法兰11。
52.机器人8的机器人控制器10被构造或设计用于执行机器人程序,通过该机器人程序,机器人臂9的关节l1至l6可以根据机器人程序被自动化或者在手动操作中被自动地调节或转动运动。为此,机器人控制器10与可操控的电驱动器、即马达m1至m6连接,这些马达被构造为调节机器人臂9的各个关节l1至l6。
53.在本实施例中,节肢g1至g7包括机器人底座13和相对于机器人底座13围绕竖直延伸的轴a1可转动安装的转盘14。机器人臂9的其它节肢包括摇臂15、悬臂16和优选为多轴的机器人手17,该机器人手具有被构造为工具法兰11的紧固装置用于紧固工具。摇臂15在下端部上,即在摇臂15的关节l2(其也可被称为摇臂轴承头)上,围绕优选为水平的转动轴a2可枢转地安装在转盘14上。
54.在摇臂15的上端部上,在摇臂15的关节l3上,也围绕同样优选为水平的轴a3可枢转地安装有悬臂16。悬臂在端部侧以其优选为三个的转动轴a4、a5、a6承载机器人手17。关节l1至l6可以通过一个电动马达m1至m6由机器人控制器10程序控制地驱动,并且能够通过配属于关节l1至l6或马达m1至m6的制动器被制动,并能够被锁定地夹住。
55.在机器人臂9中,每个被驱动的关节l1-l6配属有一个马达m1-m6和至少一个另外的驱动组件20,该另外的驱动组件选自于传动装置25、转矩变换器24、联接器23和/或制动器22的群组,其中马达m1-m6和/或至少一个另外的驱动组件20具有改变转矩传递的控制器件21,该控制器件包括至少一个发光元件21.1和影响转矩传递的物质21.2,该物质具有至少一种光稳定动态材料lsdm,并且其中,控制器件21被设计为,通过操控照射到光稳定动态材料lsdm的发光元件21.1来改变转矩传递。
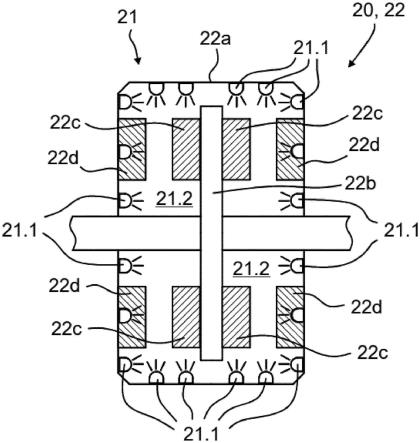
56.在图2中示出了处于第一实施方式制动器22中的、根据本发明的示例性驱动组件20,其中,改变转矩传递的控制器件21被分配给机器人臂9的至少一个制动器22;其中,各个制动器22具有被转矩联接到对应的马达m1-m6并被可转动地安装在制动器22的制动器壳体22a中的制动构件22b,该制动构件具有第一制动传递结构22c,并且制动器壳体22a具有第二制动传递结构22d;其中,第一制动传递结构22c与第二制动传递结构22d通过具有至少一种光稳定动态材料lsdm的物质21.2相接触,以便根据由发光元件21.1照射到光稳定动态材料lsdm中的光来控制第一制动传递结构22c与第二制动传递结构22d之间的转矩传递。
57.在图3中示出了处于第二实施方式联接器23中的、根据本发明的示例性驱动组件20,其中,改变转矩传递的控制器件21被分配给机器人8的至少一个联接器23;其中,联接器23具有被转矩联接到对应的马达m1-m6并被可转动地安装在联接器23的联接器壳体23e中的第一联接构件23a,该第一联接构件具有第一联接传递结构23c,并且联接器具有可转动地安装在联接器23的联接器壳体23e中的第二联接构件23b,该第二联接构件具有第二联接传递结构23d;其中,第一联接传递结构23c与第二联接传递结构23d通过具有至少一种光稳
定动态材料lsdm的物质21.2相接触,以便根据由发光元件21.1照射到光稳定动态材料lsdm中的光来控制第一联接传递结构23c与第二联接传递结构23d之间的转矩传递。
58.在图2和图3所示的第一和第二实施方式的情况下,发光元件21.1被布置在制动器壳体22a(图2)的内部或联接器壳体23e(图3)的内部,并且从制动器壳体22a(图2)或联接器壳体23e(图3)的外部对其进行电操控。
59.但是在图4至图6所示的第三至第五实施方式的情况下,发光元件21.1也可以例如布置在变换器壳体24g的内部、传动装置壳体25e的内部和/或马达壳体26e的内部,并相应地从外部对其进行电操控。
60.在图4中示出了处于第三实施方式的转矩变换器24中的、根据本发明的示例性驱动组件20,其中,改变转矩传递的控制器件21被分配给机器人8的至少一个转矩变换器24;并且其中,转矩变换器24具有被转矩联接到对应的马达m1-m6并被可转动地安装在转矩变换器24的变换器壳体24f中的第一变换构件24a,该第一变换构件具有第一变换传递结构24c,并且转矩变换器具有可转动地安装在转矩变换器24的变换器壳体24f中的第二变换构件24b,该第二变换构件具有第二变换传递结构24d,并且变换器壳体24f具有第三变换传递结构24g;其中,第一变换传递结构24c与第二变换传递结构24d和第三变换传递结构24g通过具有至少一种光稳定动态材料lsdm的物质21.2相接触,以便根据由发光元件21.1照射到光稳定动态材料lsdm中的光来控制第一变换传递结构24c与第二变换传递结构24d之间的转矩传递。
61.在根据图4的第三实施方式中,在一种变型中,发光元件21.1被布置在透光的变换器壳体24f外部,并且由发光元件21.1发出的光从外部照射到透光的变换器壳体24f中的光稳定动态材料lsdm中。
62.同样地,在根据图2、图3以及图5和图6的其它实施方式中,发光元件21.1也可以被布置在透光的制动器壳体22a外部、透光的联接器壳体23e外部、透光的传动装置壳体25e外部和/或透光的马达壳体26e外部,其中,由发光元件21.1发出的光从外部照射到光稳定动态材料lsdm中。
63.在图5中示出了处于第四实施方式传动装置25中的、根据本发明的示例性驱动组件20,其中,改变转矩传递的控制器件21被分配给机器人8的至少一个传动装置25;并且其中,传动装置25具有被转矩联接到对应的马达m1-m6并被可转动地安装在传动装置25的传动装置壳体25e中的传动装置构件25a,该传动装置构件具有第一传动传递结构25b,并且在传动装置壳体25e中布置有至少一个传动级25c,该传动级具有第二传动传递结构25d;其中,第一传动传递结构25b与第二传动传递结构25d通过具有至少一种光稳定动态材料lsdm的物质21.2相接触,以便根据由发光元件21.1照射到光稳定动态材料lsdm中的光来控制在第一传动传递结构25b与第二传动传递结构25d之间的转矩传递。
64.在根据图5的第四实施方式中,示例性地提供了其中封闭有光稳定动态材料lsdm的传动装置壳体25e,该传动装置壳体具有壳体壁,在该壳体壁中构造冷却通道30,冷却液在该冷却通道中循环(箭头p1,p2)。
65.同样在其它的实施方式中,在针对这些实施方式的变型中,制动器壳体22a、联接器壳体23e、变换器壳体24f、马达壳体26e和/或其它的封闭有光稳定动态材料(lsdm)的腔室可以在腔室的腔室壁中或各个壳体的壳体壁中构造冷却通道30,冷却液在该冷却通道中
循环。
66.在图6中示出了处于第五实施方式马达m1-m6中的、根据本发明的示例性驱动组件20,其中,改变转矩传递的控制器件21被分配给至少一个马达m1-m6;其中,马达m1-m6具有被转矩联接到对应的马达轴26a上并被可转动地安装在马达m1-m6的马达壳体26e中的转矩构件26b,该转矩构件具有第一马达转矩传递结构26c,并且马达轴26a具有第二马达转矩传递结构26d;其中,第一马达转矩传递结构26c与第二马达转矩传递结构26d通过具有至少一种光稳定动态材料lsdm的物质21.2相接触,以便根据由发光元件21.1照射到光稳定动态材料lsdm中的光来控制在第一马达转矩传递结构26c与第二马达转矩传递结构26d之间的转矩传递。
67.在根据图6的第五实施方式中,示例性地提供了具有冷却肋31的马达壳体26e,该冷却肋向外延伸。
68.然而,在其它的实施方式中,在针对这些实施方式的变型中,制动器壳体22a、联接器壳体23e、变换器壳体24f、传动装置壳体25e和/或其它的封闭有光稳定动态材料lsdm的腔室均可以配置向外延伸的冷却肋31。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。