:
1.本发明属于巡检机器人技术领域,特别涉及轨道升降式巡检机器人移动组件总成。
背景技术:
2.轨道机器人采用轨道倒挂式伺服行走方式,搭载高清摄像机及红外热成像仪,集成网络通信技术、多传感器融合技术、图像分析算法、实时数据库技术等核心技术于一体,实现长距离、的设备红外测温、信号状态指示灯的全自动识别,设备外观的异常识别、仪表的全自动识别读数;
3.但是在现有的技术中,轨道升降式巡检机器人移动组件的总成在带动升降式机器人在轨道上行走时,是通过电机带动轮体移动,但是在移动的过程中,没有辅助轮支撑,从而造成其在移动的时候,稳定性降低,导致下方倒挂的机器人巡检时会出现晃动,具有一定的不足。
技术实现要素:
4.本发明的目的就在于为了解决上述问题而提供。
5.为了解决上述问题,本发明提供了一个技术方案:
6.轨道升降式巡检机器人移动组件总成,包括驱动机构,所述驱动机构一侧与主动移动机构连接,所述驱动机构远离主动移动机构的一侧设置有的辅助移动机构,所述辅助移动机构包括副动支架,所述副动支架内部插设有一号螺栓,所述副动支架顶端两侧侧壁均与活动轴转动连接,两个所述活动轴相互靠近的一端均与一号辅助滚轮的内壁固定连接,所述副动支架顶部一侧通过螺栓连接有副辅助架,所述副辅助架靠近一号辅助滚轮一侧的顶端与底端均活动连接有副限位轮,所述副动支架位于两侧活动轴下方的四角均转动连接有二号辅助滚轮,所述副动支架位于一号螺栓上方远离驱动机构的一端转动连接有副底部轮,所述主动移动机构包括主动支架和三个传动轴,所述主动支架内部插设有二号螺栓,其中两个所述传动轴分别与主动支架顶端两侧转动连接,另一个所述传动轴的两端分别与主动支架底端两侧转动连接,底端的所述传动轴位于主动支架外侧的两端均与衔接齿轮的内壁固定连接,顶端的两个所述传动轴相互远离的一端均与从动齿轮的内壁固定连接,顶端的两个所述传动轴相互靠近的一端均与主动移动滚轮的内壁固定,所述主动支架位于两个主动移动滚轮下方的四角均转动连接有主动滚轮,所述主动支架位于二号螺栓上方且远离驱动机构的一侧转动连接有主底部轮,所述主动支架顶部一侧通过螺栓与主辅助架连接,所述主辅助架靠近主动移动滚轮一侧的顶端与底端均活动连接有主限位架。
7.所述驱动机构包括驱动电机,所述驱动电机通过螺栓固定在固定座的侧壁上,所述驱动电机的输出端穿过固定座后与主动齿轮的内壁固定。
8.作为优选,两侧的两个衔接齿轮顶部分别位于两个从动齿轮底部啮合连接,靠近所述主辅助架一侧的衔接齿轮侧壁与主动齿轮侧壁啮合连接。
9.作为优选,所述固定座一端与主动支架相靠近的一端固定连接。
10.作为优选,四个所述二号辅助滚轮的位置分别与四个主动滚轮的位置相平行。
11.作为优选,所述副底部轮的位置与主底部轮的位置相平行。
12.作为优选,两个所述主动移动滚轮的位置均与两个一号辅助滚轮的位置相平行。
13.作为优选,两个所述副限位轮的位置分别与两个主限位架的位置相平行。
14.本发明的有益效果:
15.本发明通过在主动移动机构上安装的四个主动滚轮、两个主限位架以及主底部轮,可以使驱动机构在带动主动移动机构上的两个主动移动滚轮转动,使悬挂的升降式机器人可以在移动时稳定性得到增加,避免出现晃动的问题,且通过设置有的辅助移动机构,可以方便安装在一些较长的巡检机器人上,通过辅助移动机构和主动移动机构安装在机器人顶部两侧,从而达到对较长的巡检机器人在移动时稳定性的增加。
附图说明:
16.为了易于说明,本发明由下述的具体实施及附图作以详细描述。
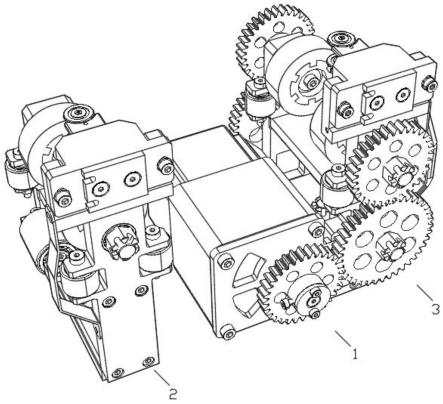
17.图1为本发明的结构示意图;
18.图2为本发明辅助移动机构的结构示意图;
19.图3为本发明辅助移动机构的副辅助架和副限位轮的结构示意图;
20.图4为本发明辅助移动机构中副底部轮的位置结构示意图;
21.图5为本发明驱动机构和主动移动机构的结构示意图;
22.图6为本发明主动移动机构的结构示意图。
23.图中:1、驱动机构;11、驱动电机;12、固定座;13、主动齿轮;2、辅助移动机构;21、副动支架;22、一号螺栓;23、活动轴;24、一号辅助滚轮;25、二号辅助滚轮;26、副辅助架;27、副限位轮;28、副底部轮;3、主动移动机构;31、主动支架;32、二号螺栓;33、传动轴;34、衔接齿轮;35、从动齿轮;36、主动移动滚轮;37、主辅助架;38、主限位架;39、主动滚轮;310、主底部轮。
具体实施方式:
24.如图1-6所示,本具体实施方式采用以下技术方案:轨道升降式巡检机器人移动组件总成,包括驱动机构1,驱动机构1一侧与主动移动机构3连接,驱动机构1远离主动移动机构3的一侧设置有的辅助移动机构2,辅助移动机构2包括副动支架 21,副动支架21内部插设有一号螺栓 22,副动支架21顶端两侧侧壁均与活动轴23转动连接,两个活动轴23相互靠近的一端均与一号辅助滚轮24的内壁固定连接,副动支架21顶部一侧通过螺栓连接有副辅助架26,副辅助架26靠近一号辅助滚轮24一侧的顶端与底端均活动连接有副限位轮27,副动支架21位于两侧活动轴23下方的四角均转动连接有二号辅助滚轮25,副动支架21位于一号螺栓22上方远离驱动机构1的一端转动连接有副底部轮 28,主动移动机构3包括主动支架31和三个传动轴 33,主动支架31内部插设有二号螺栓32,其中两个传动轴33分别与主动支架31顶端两侧转动连接,另一个传动轴33的两端分别与主动支架31底端两侧转动转动,底端的传动轴33位于主动支架31外侧的两端均与衔接齿轮34的内壁固定连接,顶端的两个传动轴33相互远离的一端均与从动齿轮35的内壁固定连接,顶端的两个传动轴33相互靠近
的一端均与主动移动滚轮36的内壁固定,主动支架31位于两个主动移动滚轮36下方的四角均转动连接有主动滚轮39,主动支架31位于二号螺栓32上方且远离驱动机构1的一侧转动连接有主底部轮310,主动支架31顶部一侧通过螺栓与主辅助架37连接,主辅助架37靠近主动移动滚轮36一侧的顶端与底端均活动连接有主限位架38。
25.驱动机构1包括驱动电机11,驱动电机11通过螺栓固定在固定座12的侧壁上,驱动电机11的输出端穿过固定座12后与主动齿轮13的内壁固定,固定座12一端与主动支架31相靠近的一端固定连接。
26.具体地需说明是,如图5所示,在本技术实施例中,两侧的两个衔接齿轮34顶部分别位于两个从动齿轮35底部啮合连接,靠近主辅助架37一侧的衔接齿轮34侧壁与主动齿轮13侧壁啮合连接,通过驱动电机11带动主动齿轮13转动,主动齿轮13通过与其啮合连接的衔接齿轮34带动两个从动齿轮35转动,从而实现两个从动齿轮35通过传动轴33带动主动移动滚轮36转动,通过主动移动滚轮36的带动倒挂在下方的机器人进行移动。
27.四个二号辅助滚轮25的位置分别与四个主动滚轮39的位置相平行,副底部轮28的位置与主底部轮310的位置相平行,两个主动移动滚轮36的位置均与两个一号辅助滚轮24的位置相平行,两个副限位轮27的位置分别与两个主限位架38的位置相平行,通过四个二号辅助滚轮25和四个主动滚轮39抵住轨道的底部侧壁、副底部轮28和主底部轮310抵住轨道的底部以及两个副限位轮27和两个主限位架38抵住轨道的顶部一侧,提高稳定的移动效果。
28.具体的:在安装本发明时,主动移动机构3通过主动支架31上插设的二号螺栓32与下方倒挂的升降式巡检机器人顶部连接,通过驱动机构1传动给主动移动机构3,从而带动机机器人进行移动,若升降式巡检机器人体积较长,单个的主动移动机构3无法在移动时满足其所需的稳定性时,可以在升降式巡检机器人顶部位于驱动机构1远离主动移动机构3的一侧安装辅助移动机构2,通过副动支架21上的一号螺栓22即可,此时如图1所示,辅助移动机构2位于驱动机构1左侧,起到辅助移动的效果,主动移动机构3位于驱动机构1右侧,通过驱动机构1驱动起到主动移动的效果;
29.本装置在使用时,通过驱动电机11的工作,驱动电机11带动主动齿轮13转动,主动齿轮13带动与其啮合连接的一侧衔接齿轮34转动,该一侧的衔接齿轮34通过传动轴33带动另一侧的衔接齿轮34转动,两个衔接齿轮34的转动从而通过两个传动轴33带动两个主动移动滚轮36一并转动,两个主动移动滚轮36位于轨道的内部两侧,通过驱动机构1带动两个主动移动滚轮36的转动,使升降式巡检机器人可以进行移动,而升降式巡检机器人移动,可以带动辅助移动机构2一并移动,辅助移动机构2在移动时,可以起到一定的辅助稳定效果,在移动时,主动移动机构3内的四个主动滚轮39以及辅助移动机构2的四个二号辅助滚轮25夹住轨道底部的两侧的外侧壁,主动移动机构3的主底部轮310以及辅助移动机构2的副底部轮28抵住轨道的底部,主动移动机构3的两个主限位架38以及辅助移动机构2的两个副限位轮27可以抵住轨道一侧顶部的上方以及下方,且本装置可以根据工作人员的需要,在辅助移动机构2的副动支架21顶部另一侧安装相同的副辅助架26以及两个副限位轮27,在主动移动机构3的主动支架31顶部另一侧安装相同的主辅助架37以及两个主限位架38,通过设置有的辅助移动机构2、辅助移动机构2内的二号辅助滚轮25、副限位轮27以及副底部轮28以及主动移动机构3的主动滚轮39、主底部轮310以及主限位架38,可以使下方的升降式巡
检机器人在移动时,稳定性得到大大的提高,在移动时,不会出现晃动的问题,且可以匹配一些体积较长的升降式巡检机器人搭配使用。
30.以上显示和描述了本发明的基本原理和主要特征和本发明的优点,本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内,本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。