1.本发明涉及一种智能行走机器人装车引导系统和装车方法,是一种机械自动化运输机械的辅助设施和工艺方法,是一种散料自动化装车站使用的自动化辅助设施和装车工艺方法。
背景技术:
2.无人化散料汽车装车站的主要任务是安全、高效且兼顾环保的将物料均匀装进汽车车厢。目前,最高效环保的无人化装车方案是智能系统利用激光扫描技术测量车厢三维尺寸并跟踪车厢位置,通过多媒体指挥车辆行进并卸料装车,单次装车时间可以低至30秒以下。虽然智能系统的指挥形式多样,包括语音指引、红绿灯指示、大屏幕装车视频和文字指令播放等,但无人装车的效率还需依赖卡车司机的配合度。由于卡车司机文化水平和理解能力差异,卡车司机与智能指挥系统的衔接并不是很顺畅。例如,司机驱车至装车起始位置,如果偏离停车位置较远,还需智能指挥系统引导司机再次调整位置;装车过程中,如果汽车行进速度过快则会出现车厢前部分装的少,后部分装的多甚至物料堆积过高“鼓包”的情况。
3.为了克服因为卡车司机主观因素导致的部分装车作业的装车效率不高和装车效果达不到预期的问题,科技工作者想了很多办法。有人将卸料溜口改为长度可调的伸缩皮带给料,优点是卡车驻车不动,司机不用操作,缺点是装车速度慢,扬尘较大,伸缩皮带机械结构复杂、成本较高、维护成本较高。有人将装车间地面装设传送带或平移车,卡车停在传送带或平移车上,由智能系统带动卡车移动并自动装车,优点是卡车驻车不动,司机不用操作,缺点是传送带或平移车机械结构复杂、耗材成本和施工成本高、维护成本高。
4.如何经济且高效的降低甚至消除由卡车司机主观因素给装车过程带来的影响,是一个需要解决的问题。
技术实现要素:
5.为了克服现有技术的问题,本发明提出了一种智能行走机器人装车引导系统和装车方法。所述的系统和装车方法在装车的汽车正前方设置一个智能指挥机器人,用于图像、文字、语言等多种形式,以最简单明了的方式指挥汽车的行进,进行全自动装车,实现了装车过程完全指挥自动化,让汽车司机能够十分容易的理解装车过程中机器准备做或正在做事的意图,使司机能够完全的配合,达到高效装车的目的。
6.本发明的目的是这样实现的:一种智能行走机器人装车引导系统,包括:安装在装车间中的汽车身份识别装置,安装在装车站溜槽出车端上方沿汽车行进方向的轻轨,所述的轻轨上设有能够沿轻轨行进的小车型的智能机器人,所述的智能机器人上设有智能指挥控制器、小车运动机构、汽车运动状态传感器、音响提示装置、能够收放的图像提示装置。
7.进一步的,所述的汽车身份识别装置包括光栅或多线激光雷达,以及车牌识别装置或电子标签。
8.进一步的,所述的小车运动机构是电机和减速器,并使用能够收放的电缆提供能源。
9.进一步的,所述的汽车运动状态传感器是多线激光雷达。
10.进一步的,所述的图像提示装置是彩色液晶或led显示屏。
11.进一步的,所述的图像提示装置的收放采用伸缩型收放。
12.进一步的,所述的图像提示装置的收放采用沿车辆行进方向的摆动收放。
13.一种使用上述系统的智能行走机器人装车引导的装车方法,所述方法的步骤如下:步骤1,汽车抵进装车间:装车汽车到达装车间,装车间的汽车身份识别装置获取汽车的车辆标载量、车牌号、毛重的信息;步骤2,汽车尺寸确认:通过光栅或多线激光雷达对汽车进行尺寸测量,确认车厢长度、车厢宽度、车厢侧梆高度以及跟踪车厢后梆实时位置;步骤3,放下提示装置:智能机器人处于初始位置,放下提示图像提示装置,使提示装置位于汽车的正前方,便于汽车司机观察;步骤4,装车提示:根据汽车的各项信息,智能指挥控制器通过图像提示装置和音响提示装置发出各种车行命令,指挥自己控制汽车前行并保持一定速度,同时智能机器人随汽车的前行也在轻轨上移动,避免与汽车前部发生碰撞;步骤5,装车:当汽车车厢到达装车中溜槽的位置时,溜槽放下开始放料,这时汽车在智能机器人的指挥下,维持前行,进行装车作业;步骤6,装车结束:当汽车车厢尾部达到溜槽时,车厢装满,图像提示装置和音响提示装置提示卸料结束,智能机器人收起图像提示装置并回到初始位置,汽车驶离装车间,装车过程结束。
14.本发明的优点和有益效果是:本发明在装车站溜槽的后方设置一条轨道,在轨道上设置小车,小车即为带有传感器和指示装置智能机器人,当汽车进入装车站时,智能机器人将传感器和指示装置放下至汽车的正前方,同时随着汽车的前行智能机器人也前行。智能机器人在前行时对汽车的运行状态进行监测并对司机发出控制汽车前行的指示,以使汽车按照装车站的要求行进装车,装车结束后传感器和指示装置升起,装车结束。在装车过程中智能指挥机器人通过指示装置用于图像、文字、语言等多种形式,以最简单明了的方式指挥汽车的行进,控制车速进行全自动装车,实现了装车过程完全指挥自动化,让汽车司机能够十分容易的理解装车过程中机器准备做或正在做事的意图,使司机能够完全的配合,达到高效装车的目的。
附图说明
15.下面结合附图和实施例对本发明作进一步说明。
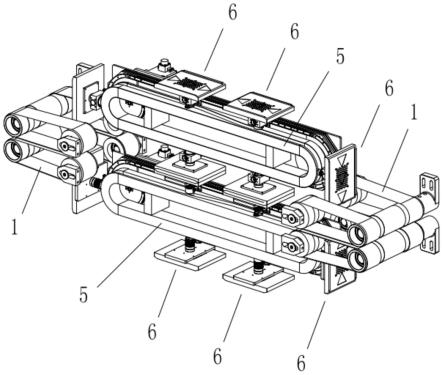
16.图1是本发明实施例一所述系统的结构示意图;图2是本发明实施例八所述方法的流程示意图。
具体实施方式
17.实施例一:
本实施例是一种智能行走机器人装车引导系统,如图1所示。本实施例包括:安装在装车间201中的汽车身份识别装置1,安装在装车站2溜槽202出车端上方沿汽车3行进方向(图1中箭头a所示)的轻轨4,所述的轻轨上设有能够沿轻轨行进(图1中箭头b所示)的小车型的智能机器人5,所述的智能机器人上设有智能指挥控制器、小车运动机构、汽车运动状态传感器、音响提示装置、能够收放的图像提示装置501。
18.所述的装车站是带钢结构架和皮带机称重仓等的自动化装车站,专门用于将散装物料,如煤炭等装入汽车(卡车)中的大型自动化装载机械设备。
19.所述的汽车身份识别装置可以是光栅和多线激光雷达,以及车牌识别装置或电子标签,用于确定汽车进行装车间的速度和位置,以及车辆的牌号,并通过牌号确定是否为计划中装车的车辆,是否为错误的车辆。并通过光栅或激光雷达确定车辆的速度和具体位置,以便指挥其装车。
20.小车形机器人可以通过电机和减速器驱动车辆在轻轨上运动。小车的驱动能源可以采用拉线缆的方式实现供电。
21.智能指挥控制器是具有计算存储能力的电子设备,如工业pc,单片机、单板机、嵌入式系统等。
22.汽车运动状态传感器安装在小车机器人上的设备,用于防止车辆前行太快冲撞图像提示装置,汽车运动状态传感器可以是多线激光多普勒雷达,能够快速的计算出两个运动物体间的距离,一旦距离过短则发出警告,或直接收起图像提示装置。
23.图像提示装置可以是液晶显示屏或led显示屏,或者是灯光,如红绿灯。设置在汽车的正前方的目的是让司机能够清楚明白提示的内容,而减少了司机由于业务不熟悉而造成的麻烦,以提高装车效率。
24.图像提示装置的收放可以采用伸缩的形式,也可以采用摆动的形式。摆动形式的好处是,可以将摆动的方向与汽车行进的方向一致,这样即便发生意外,车头碰撞了图像提示装置,也可以通过摆动而卸去冲击,避免碰撞损坏。
25.本实施例的工作原理:智能指挥机器人是一种可行走的指挥装置,它与智能装车系统紧密结合,用指挥机器人指挥装车是一种高效实用的指挥手段。指挥机器人包括行走指挥小车、指挥车行走轨道及轨道支撑框架、移动电缆等。其中行走指挥车是主要部分,包括智能指挥控制器、电力驱动器、室外音柱(音响提示装置)、测距定位雷达(多线激光雷达)、图像提示装置的显示屏或红绿灯及升降臂等。
26.智能指挥控制器是智能计算单元,用于接收智能装车主控系统指令,按指令执行指挥车行走、升降伸缩臂操作、反馈指挥车位置和控制红绿灯等。
27.电力驱动器用于驱动指挥车行进。
28.室外音柱用于播放指挥指令语音,指令语音包括:“前进”、“停车”、“保持距离”、“装车完成,请离场”等。
29.测距定位扫描雷达采用多线激光扫描雷达,安装于指挥车伸缩臂上,用于定位指挥车位置以及测量卡车车头位置,该位置信息由智能指挥控制器转发给智能装车主控系统。
30.红绿灯用于指挥车辆前进或停车,安装于指挥车伸缩臂多线激光扫描雷达下方。
红绿灯放出时,高度处于卡车司机正前方视域,伸缩臂收回红绿灯时保证卡车通过不会被其磕碰。
31.指挥车行走轨道及轨道支撑框架用于支撑智能指挥车行走,采用架空安装方式。移动电缆用于为指挥车供电和信号通信传输。
32.实施例二:本实施例是实施例一的改进,是实施例一关于汽车身份识别装置的细化。本实施例所述的汽车身份识别装置包括光栅或多线激光雷达,以及车牌识别装置或电子标签。
33.汽车身份识别装置同时还要识别进入装车间的车辆的速度和位移变化,以便进行指挥操作,因此本实施例所述的汽车身份识别装置还包括位移传感器。身份识别可以通过汽车的号牌,或通过装卸场专用的电子标签。通过身份识别可以查出车辆的身份是否为本次装车计划的车辆,防止其他车辆混入。
34.实施例三:本实施例是上述实施例的改进,是上述实施例关于小车运动机构细化。本实施例所述的小车运动机构是电机和减速器,并使用能够收放的电缆提供能源。
35.为是小车机器人能够沿轻轨运动,本实施例采用最简单清洁的电机传动,带动小车轮转动,而形成机器人运动,并采用拉电缆的形式实现能源供应。
36.实施例四:本实施例是上述实施例的改进,是上述实施例关于汽车运动状态传感器的细化。本实施例所述的汽车运动状态传感器是多线激光雷达。
37.汽车运动传感器的作用防止车头与图像提示装置相碰撞,因此可以采用多普勒雷达,只需计算两者的相对位置,而不必精确的计算两者的实际位置。
38.实施例五:本实施例是上述实施例的改进,是上述实施例关于图像提示装置的细化。本实施例所述的图像提示装置是彩色液晶或led显示屏。
39.彩色液晶或led显示屏可以显示各种文字图像,甚至动画等图形,虽然成本略高,但可以十分清楚明白的显示各种信息,甚至可以显示车辆行进的精确信息,这特别有利于车辆的指挥。
40.实施例六:本实施例是上述实施例的改进,是上述实施例关于图像提示装置的细化。本实施例所述的图像提示装置的收放采用伸缩型收放,如图1中箭头a方向所示。
41.实施例七:本实施例是上述实施例的改进,是上述实施例关于图像提示装置的细化。本实施例所述的图像提示装置的收放采用沿车辆行进方向的摆动收放,如图1中箭头b方向所示。
42.实施例八:本实施例是一种使用上述实施例所述系统的智能行走机器人装车引导的装车方法,所述方法的步骤如下:步骤1,汽车抵进装车间:装车汽车到达装车间,装车间的汽车身份识别装置获取汽车的车辆标载量、车牌号、毛重的信息。
43.车辆的身份识别在装车过程中特别重要。由于装车的物料是商品,售卖和收买人
对其价格、品质都十分重视,因此装车时必须装对车才能到达商品交易的过程,否则无效。因此本实施例首先要识别车辆的身份,并从车辆身份中识别出车的类型、容量等等信息。
44.步骤2,汽车尺寸确认:通过光栅或多线激光雷达对汽车进行尺寸测量,确认车厢长度、车厢宽度、车厢侧梆高度以及跟踪车厢后梆实时位置。
45.装车均匀离不开对整个车厢容量的识别,因此先要对车厢进行识别。在车辆身份识别时应当已经知道了车厢的尺寸,但还需要通过现场的传感器进行确认,以确保装车的正确性。
46.步骤3,放下提示装置:智能机器人处于初始位置(所述的初始位置是在智能机器人最接近溜槽的位置,如图1中c点的位置),放下提示图像提示装置,使提示装置位于汽车的正前方,便于汽车司机观察。本步骤是关键性步骤,放下彩色显示屏,让显示屏正好在司机视野的正前方,并明确的告诉司机所需要的信息。
47.步骤4,装车提示:根据汽车的各项信息,智能指挥控制器通过图像提示装置和音响提示装置发出各种车行命令,指挥自己控制汽车前行并保持一定速度,同时智能机器人随汽车的前行也在轻轨上移动,避免与汽车前部发生碰撞。
48.本步骤是车辆开始装车时,提示车辆前行,并通过自动引导,避免显示屏与车头相撞。
49.步骤5,装车:当汽车车厢到达装车中溜槽的位置时,溜槽放下开始放料,这时汽车在智能机器人的指挥下,维持前行,进行装车作业。
50.在装车作业过程中,一边车辆前行,机器人也自动前行,并与车辆保持一段安全距离,使司机能够清楚看到提示。
51.步骤6,装车结束:当汽车车厢尾部达到溜槽时,车厢装满,图像提示装置和音响提示装置提示卸料结束,智能机器人收起图像提示装置并回到初始位置,汽车驶离装车间,装车过程结束。
52.装车结束后,机器人小车回到初始位置准备下一轮的装车作业。
53.最后应说明的是,以上仅用以说明本发明的技术方案而非限制,尽管参照较佳布置方案对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案(比如装车站的形式、机器人小车的控制方式、步骤的先后顺序等)进行修改或者等同替换,而不脱离本发明技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。