技术特征:
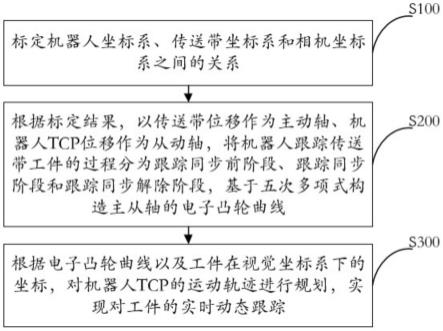
1.一种基于电子凸轮的机器人传送带跟踪方法,其特征在于,所述方法包括:标定机器人坐标系、传送带坐标系和相机坐标系之间的关系;根据标定结果,以传送带位移作为主动轴、机器人tcp位移作为从动轴,将机器人跟踪传送带工件的过程分为跟踪同步前阶段、跟踪同步阶段和跟踪同步解除阶段,基于五次多项式构造主从轴的电子凸轮曲线;根据电子凸轮曲线以及工件在视觉坐标系下的坐标,对机器人tcp的运动轨迹进行规划,实现对工件的实时动态跟踪。2.根据权利要求1所述的方法,其特征在于,所述标定机器人坐标系、传送带坐标系和相机坐标系之间的关系的步骤,具体包括:在传动带上进行点位标记,所述点位包括沿传动带运动方向上的第一点位组(p1,p2,p3)和第二点位组(p4,p5),其中,第一点位组和第二点位组位置不重合;根据第一点位组的坐标以及编码器信息,计算传送带位移与机器人tcp位移之间的比例因子;根据第一点位组和第二点位组的坐标以及编码器信息,得到第一转换矩阵和第二转换矩阵,其中所述第一转换矩阵为机器人坐标系与传动带坐标系之间的转换矩阵,第二转换矩阵为传送带坐标系与视觉相机坐标系之间的转换矩阵;根据所述第一转换矩阵、第二转换矩阵和比例因子得到工件在机器人坐标系下的实时坐标信息。3.根据权利要求2所述的方法,其特征在于,所述标定机器人坐标系、传送带坐标系和相机坐标系之间的关系的步骤,具体包括:将工件放置在视觉相机视野下方,采集该p1点在视觉坐标系下的坐标及当前传送带对应的编码器值;移动传送带使工件从p1移至p2位置,采集p2在机器人坐标系下的坐标及当前传送带对应的编码器值。移动传送带使工件从p2移至p3位置,采集p3在机器人坐标系下的坐标及当前传送带对应的编码器值;根据p1、p2和p3的坐标信息及其对应的编码器值计算机器人tcp末端移动距离与传送带移动距离的比例因子;将工件放置在相机视野下方与p1点形成对角的位置处,采集该p4点在视觉坐标系下的坐标及当前传送带对应的编码器值;移动传送带使工件从p4移至p5位置,采集p5在机器人坐标系下的坐标及当前传送带对应的编码器值;根据p2、p3和p5在机器人坐标系下的坐标计算第一转换矩阵;根据p1、p2、p4和p5的坐标、比例因子和第一转换矩阵计算得到第二转换矩阵。4.根据权利要求1所述的方法,其特征在于,所述根据电子凸轮曲线以及工件在视觉坐标系下的坐标,对机器人tcp的运动轨迹进行规划,实现对工件的实时动态跟踪的步骤,具体包括:获取工件队列中进入跟踪抓取范围的首个工件的坐标信息;将工件的坐标信息转化到机器人坐标系中,得到机器人tcp应到达的期望位置;
获取传动带的实时位移,根据电子凸轮曲线得到沿传送带方向机器人tcp实时变化的位移;根据期望位置和机器人tcp实时变化的位移,得到机器人tcp实际位移;将机器人tcp实际位移利用机器人运动学逆解方法转换到关节坐标系下,得到机器人对应的关节角度值,生成角度运动指令使所述机器人执行该指令,按照跟踪同步前阶段、跟踪同步阶段和跟踪同步解除阶段跟踪抓取工件。5.根据权利要求4所述的方法,其特征在于,还包括以下步骤:实时判定是否有工件从传送带输入;当存在工件从传动带输入时,将工件坐标转换至传送带坐标系下;对经过转换的工件坐标进行滤重处理后排列,得到工件队列。6.根据权利要求1所述的方法,其特征在于,所述根据电子凸轮曲线以及工件在视觉坐标系下的坐标,对机器人tcp的运动轨迹进行规划,实现对工件的实时动态跟踪的步骤中:在跟踪同步前阶段中,所述机器人tcp的运动轨迹由根据当前位置与工件目标位置进行规划的轨迹和根据电子凸轮曲线生成的对应阶段的轨迹合成得到;在跟踪同步阶段和跟踪同步解除阶段中,所述机器人tcp的运动轨迹由额外的运动轨迹和根据电子凸轮曲线生成的对应阶段的轨迹合成得到。7.一种基于电子凸轮的机器人传送带跟踪系统,其特征在于,所述系统包括:坐标系标定模块,用于标定机器人坐标系、传送带坐标系和相机坐标系之间的关系;电子凸轮曲线构造模块,用于根据标定结果,以传送带位移作为主动轴、机器人tcp位移作为从动轴,将机器人跟踪传送带工件的过程分为跟踪同步前阶段、跟踪同步阶段和跟踪同步解除阶段,基于五次多项式构造主从轴的电子凸轮曲线;动态跟踪模块,用于根据电子凸轮曲线以及工件在视觉坐标系下的坐标,对机器人tcp的运动轨迹进行规划,实现对工件的实时动态跟踪。8.根据权利要求7所述的系统,其特征在于,所述坐标系标定模块包括:点位标记单元,用于在传动带上进行点位标记,所述点位包括沿传动带运动方向上的第一点位组(p1,p2,p3)和第二点位组(p4,p5),其中,第一点位组和第二点位组位置不重合;比例因子确认单元,用于根据第一点位组的坐标以及编码器信息,计算传送带位移与机器人tcp位移之间的比例因子;转换矩阵计算单元,用于根据第一点位组和第二点位组的坐标以及编码器信息,得到第一转换矩阵和第二转换矩阵,其中所述第一转换矩阵为机器人坐标系与传动带坐标系之间的转换矩阵,第二转换矩阵为传送带坐标系与视觉相机坐标系之间的转换矩阵;执行单元,用于根据所述第一转换矩阵、第二转换矩阵和比例因子得到工件在机器人坐标系下的实时坐标信息。9.根据权利要求7所述的系统,其特征在于,所述动态跟踪模块包括:坐标获取单元,用于获取工件队列中进入跟踪抓取范围的首个工件的坐标信息;坐标转化单元,用于将工件的坐标信息转化到机器人坐标系中,得到机器人tcp应到达的期望位置;传动带实时位移获取单元,用于获取传动带的实时位移,根据电子凸轮曲线得到沿传送带方向机器人tcp实时变化的位移;
实际位移确定单元,用于根据期望位置和机器人tcp实时变化的位移,得到机器人tcp实际位移;指令生成单元,用于将机器人tcp实际位移利用机器人运动学逆解方法转换到关节坐标系下,得到机器人对应的关节角度值,生成角度运动指令使所述机器人执行该指令,按照跟踪同步前阶段、跟踪同步阶段和跟踪同步解除阶段跟踪抓取工件。10.根据权利要求7所述的系统,其特征在于,所述在跟踪同步前阶段中,所述机器人tcp的运动轨迹由根据当前位置与工件目标位置进行规划的轨迹和根据电子凸轮曲线生成的对应阶段的轨迹合成得到;在跟踪同步阶段和跟踪同步解除阶段中,所述机器人tcp的运动轨迹由额外的运动轨迹和根据电子凸轮曲线生成的对应阶段的轨迹合成得到。
技术总结
本发明适用于机器人传送带跟踪技术领域,提供了一种基于电子凸轮的机器人传送带跟踪方法和系统,所述方法包括:标定机器人坐标系、传送带坐标系和相机坐标系之间的关系;根据标定结果,以传送带位移作为主动轴、机器人TCP位移作为从动轴,将机器人跟踪传送带工件的过程分为跟踪同步前阶段、跟踪同步阶段和跟踪同步解除阶段,基于五次多项式构造主从轴的电子凸轮曲线;根据电子凸轮曲线以及工件在视觉坐标系下的坐标,对机器人TCP的运动轨迹进行规划,实现对工件的实时动态跟踪。本发明实施例可实现机器人TCP末端快速、准确、平稳地跟踪传送带工件的效果。工件的效果。工件的效果。
技术研发人员:莫超亮 曾奇 何胜红 晏晚君
受保护的技术使用者:深圳市金奥博科技股份有限公司
技术研发日:2022.11.25
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。