1.本实用新型涉及机械臂控制,尤其是一种半导体电容传感机械手臂控制装置。
背景技术:
2.机械手臂在抓取和传送晶圆时,由于物理摩擦或者长时间的金属疲劳,手臂下端会产生下垂,而由于晶圆盒每一格晶圆间距很小,在机械手臂抓取上一片晶圆的时候,如果手臂发生了下垂,就容易刮蹭下面的晶圆的表面;在全自动生产中,一般一次至少要加工完一盒晶圆才会进行目检晶圆表面,有时甚至是一个批次的加工完再目检,如果在加工过程中发生了刮蹭,由于没有即时的停止机制,同时也没有机制预防在传递晶圆的过程中中断或者报警,则会对客户造成一定的损失,现有的解决方法一般是定期对机械手臂进行校准,定期保养机械手臂,或者加工产品之前跑一定的测机晶圆,对设备状态进行确认;生产过程中间隔一定的晶圆数量进行抽查等等措施来确保机器状态正常。这些方式和措施在机械手臂正常状态下是不会有损失,但是一旦在机械手臂在运行的过程中出现下垂,由于单片晶圆成本本身就很高,那么在晶圆被划伤之后损失将会进一步加大。
技术实现要素:
3.本实用新型的主要目的在于提供一种能机械手臂进行控制,防止划伤晶圆的后装式机械手臂防刮蹭装置;
4.为实现上述目的,本实用新型采取的技术方案为:
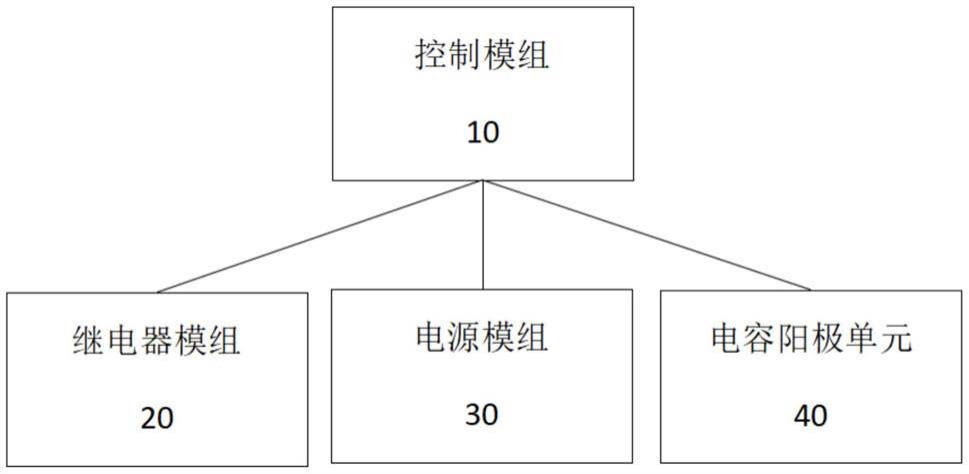
5.一种半导体电容传感机械手臂控制装置,包括控制模组、继电器模组、电源模组以及电容阳极单元;
6.所述控制模组与所述继电器模组以及所述电源模组相连,所述电容阳极单元设置在所述外部机械手上并与所述控制模组相连,所述继电器模组还与外部机械手臂暂停装置相连;
7.其中,所述控制模组包括控制单元以及复位单元;
8.所述控制单元与所述复位单元相连。
9.进一步的,所述继电器模组还可与外部声光报警装置相连。
10.进一步的,所述控制单元的型号为attiny3217-mnr。
11.进一步的,所述继电器模组包括继电器单元以及继电器控制单元;
12.所述继电器控制单元与所述继电器单元以及所述控制模组相连,所述继电器单元与外部机械手臂暂停装置或外部声光报警装置相连。
13.进一步的,所述电源模块包括立式接口以及稳压单元;
14.所述立式接口与外部供电以及所述稳压单元相连,所述稳压单元还与所述控制模组相连。
15.本实用新型采用上述结构,通过设置电容阳极单元与晶圆片产生电容效应,并设置控制模组根据所述电容效应控制外部机械臂停止下降的方式实现了防止机械臂下降过
度导致划伤晶圆,解决了现有技术当中如果外部机械臂发生了下垂,就容易刮蹭下面的晶圆的表面,同时由于没有即时的停止机制,容易造成晶圆材料的浪费并造成经济损失。
附图说明
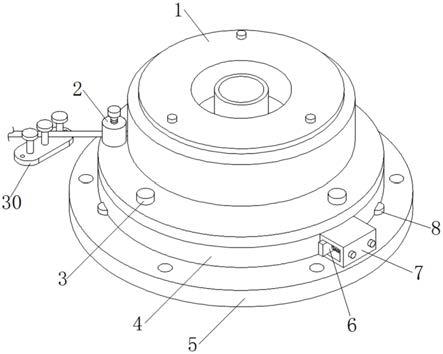
16.图1为本实用新型一实施例的结构示意图;
17.图2为本实用新型一实施例中控制模组的电路示意图;
18.图3为本实用新型一实施例中继电器模组的电路示意图;
19.图4为本实用新型一实施例中电源模组的电路示意图;
20.图中标号名称为:10-控制模组、20-继电器模组、30-电源模组、40-电容阳极单元、11-控制单元、12-复位单元、21-继电器单元、22-继电器控制单元、31-立式接口、32-稳压单元。
具体实施方式
21.下面结合附图对本实用新型的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本实用新型,但并不构成对本实用新型的限定。此外,下面所描述的本实用新型各个实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
22.一种半导体电容传感机械手臂控制装置,如图1所示,包括控制模组10、继电器模组20、电源模组30以及电容阳极单元40;
23.控制模组10与继电器模组20以及电源模组30相连,电容阳极单元40设置在所述外部机械手上并与控制模组10相连,继电器模组20还与外部机械手臂暂停装置相连;
24.电容阳极单元40用于与晶圆盒内的下一片晶圆表面构成一个电容;
25.控制模组10用于当所述外部机械手臂下降并与晶圆接触时形成电容效应,此时电容阳极单元40产生的电容感应值会线性变大,而当控制模组10获取到所述电容感应值大于预设电容感应值时,向继电器模组20发送继电器控制指令;
26.继电器模组20用于根据所述继电器控制指令向外部机械手臂暂停装置发送暂停信号,从而防止所述外部机械手臂下降过度导致划伤晶圆。
27.其中,如图2所示,控制模组10包括控制单元11以及复位单元12;
28.控制单元11与复位单元12相连;
29.控制单元11的10引脚连接电容阳极单元40,8引脚连接继电器模组20,当控制单元11探测到所述电容感应值大于预设电容感应值时,便通过8脚输出高电平,控制继电器模组20进行吸合,从而实现控制继电器模组20的效果;
30.复位单元12用于向控制模组10发送复位信号,从而实现系统复位。
31.进一步的,继电器模组20还可与外部声光报警装置相连;
32.则继电器模组20还可用于根据所述继电器控制指令向外部声光报警装置发送报警信号,从而提醒工作人员进行检查维修。
33.进一步的,控制单元11的型号为attiny3217-mnr。
34.进一步的,如图3所示,继电器模组20包括继电器单元21以及继电器控制单元22;
35.继电器控制单元22与继电器单元21以及控制模组10相连,继电器单元21与外部机
械手臂暂停装置或外部声光报警装置相连;
36.继电器控制单元22用于获取所述继电器控制指令,并根据所述继电器控制指令控制继电器单元21进行开合。
37.进一步的,如图4所示,电源模块30包括立式接口31以及稳压单元32;
38.立式接口31与外部供电以及稳压单元32相连,稳压单元32还与控制模组10相连。
39.在本实用新型一具体应用场景中,继电器模组20与外部机械手臂暂停装置相连;
40.则当外部机械手比下降时,电容阳极单元40与晶圆盒内的下一片晶圆表面构成一个电容,同时所述外部机械手臂下降并与晶圆接触时会形成电容效应,此时电容阳极单元40产生的电容感应值会线性变大,而当控制模组10获取到所述电容感应值大于预设电容感应值时,向继电器模组20发送继电器控制指令,此时继电器模组20根据所述继电器控制指令向外部机械手臂暂停装置发送暂停信号,之后所述外部机械手臂暂停装置控制所述外部机械手臂停止下降,从而防止所述外部机械手臂下降过度导致划伤晶圆。
41.在本实用新型的描述中,需要说明的是,术语“竖直”、“上”、“下”、“水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
42.在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。