1.本发明涉及救援装备技术领域,尤其涉及一种救援设备。
背景技术:
2.在科技水平与市场需求的推动下,救援机器人等新式装备正加速发展,日益多样化、专业化,功能也不断增强,目前我国已研制出多种救援机器人,但大多数采用履带进行移动,在地震现场崎岖不平的环境下容易受到影响,且极少有救援机器人能够深入建筑内部进行探测与救援。国外部分厂家研制的蛇形救援机器人能够深入建筑内部进行探测,但却无法实施救援。
技术实现要素:
3.为了克服现有技术的不足,本发明的目的在于提供一种救援设备,以解决现有的救援机器人无法兼顾实施救援和适应复杂地形的问题。
4.本发明的目的采用如下技术方案实现:一种救援设备,包括机身、摄像装置、作业机构和行进机构;所述摄像装置设于所述机身上;所述作业机构包括夹持装置和两个机械臂,两个所述机械臂分别位于所述机身的两侧,且所述机械臂活动连接于所述机身,至少一个所述机械臂上设有所述夹持装置;所述行进机构包括多个机械腿,多个所述机械腿均匀布置于所述机身的外边缘,所述机械腿活动连接于所述机身。
5.在某些可选的实施例中,所述机械臂包括依序设置的第一支臂、第二支臂和第三支臂,所述第二支臂的两端分别转动连接于所述第一支臂的一端和所述第三支臂的一端,所述第一支臂的另一端转动连接于所述机身,所述第三支臂上设有所述夹持装置;所述第二支臂与第一支臂之间的转轴平行于所述第二支臂与第三支臂之间的转轴,所述第一支臂与机身之间的转轴垂直于所述第一支臂与第二支臂之间的转轴。
6.在某些可选的实施例中,所述作业机构还包括固定装置,所述固定装置设于所述机身的侧边,所述固定装置包括连接部和两个平行设置的固定部,所述连接部的两端分别连接于两个所述固定部,使所述固定装置的截面呈u形,两个所述固定部分别位于所述第一支臂的两侧,所述第一支臂转动连接于所述固定部。
7.在某些可选的实施例中,所述夹持装置包括机架和两个相对设置的夹持组件,所述机架连接于所述机械臂,所述夹持组件包括第一摇臂、第二摇臂和夹持臂,所述第一摇臂的两端分别转动连接于所述机架和夹持臂,所述第二摇臂的两端分别转动连接于所述机架和夹持臂,所述机架、第一摇臂、第二摇臂和夹持臂形成平行四边形结构。
8.在某些可选的实施例中,两个所述第二摇臂上分别设有第一齿轮,两个所述第二摇臂的所述第一齿轮相啮合。
9.在某些可选的实施例中,所述机架上设有驱动电机,所述驱动电机的主轴上设有
第二齿轮,所述第二齿轮啮合于其中一个所述第一齿轮。
10.在某些可选的实施例中,所述机械腿包括依序设置的第一支腿、第二支腿和第三支腿,所述第二支腿的两端分别转动连接于所述第一支腿的一端和所述第三支腿的一端,所述第一支腿的另一端转动连接于所述机身;所述第二支腿与第一支腿之间的转轴平行于所述第二支腿与第三支腿之间的转轴,所述第一支腿与机身之间的转轴垂直于所述第一支腿与第二支腿之间的转轴。
11.在某些可选的实施例中,所述机械腿的数量设有六个,其中三个所述机械腿位于所述机身的一侧,其余三个所述机械腿位于所述机身的另一侧。
12.在某些可选的实施例中,所述摄像装置的数量设有两个,两个所述摄像装置并列设置。
13.在某些可选的实施例中,所述机身的端部设有摆动装置,所述摆动装置活动连接于所述机身。
14.相比现有技术,本发明的有益效果在于:机身上设置的多个机械腿能够使其通过复杂地形,进入受灾区域,机械臂能够尝试移开路径上的障碍物,且机械臂安装的夹持装置可以夹持救灾物资或对受灾人员实施救援作业,摄像装置则能够拍摄受灾区域的影像以供救灾人员查看。
附图说明
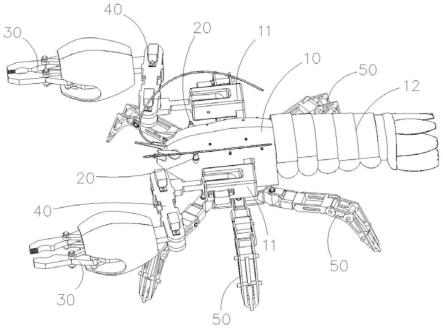
15.图1为发明的救援设备的外形结构示意图;图2为发明的救援设备的内部结构示意图;图3为图2中a处的放大示意图;图4为图2中b处的放大示意图;图中:10、机身;11、固定装置;12、摆动装置;20、摄像装置;30、夹持装置;31、第一摇臂;32、第二摇臂;321、第一齿轮;33、夹持臂;34、机架;341、第二齿轮;40、机械臂;41、第一支臂;42、第二支臂;43、第三支臂;50、机械腿;51、第一支腿;52、第二支腿;53、第三支腿。
具体实施方式
16.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳的实施例。但是,本发明可以用许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
17.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
18.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
19.实施例1结合图1至图4所示,示意性地显示了本发明的一种救援设备,包括机身10、摄像装置20、作业机构和行进机构。
20.摄像装置20设于机身10上,用于拍摄该救援设备周围的景象,在本实施例中,机身10还设有通讯装置,通讯装置和摄像装置20电连接,通过通讯装置将摄像装置20采集的影像数据传输至远端的控制设备,供救援人员远程查看。
21.作业机构包括夹持装置30和两个机械臂40,两个机械臂40分别位于机身10的两侧,且机械臂40活动连接于机身10,至少一个机械臂40上设有夹持装置30,机械臂40能够推开阻挡在机身10前的障碍物,机械臂40上的夹持装置30可以夹取物品,为受灾人员携带必要的救灾物资。
22.行进机构包括多个机械腿50,多个机械腿50均匀布置于机身10的外边缘,机械腿50活动连接于机身10,机械腿50的设置使得该救援设备能够在复杂的地形上持续行进,尤其是在建筑废墟中行进。
23.机械臂40上除了能够设置夹持装置30,还可根据实际救灾情况设置电钻、电锤、液压剪等作业工具。
24.具体地,结合图2,机械臂40包括依序设置的第一支臂41、第二支臂42和第三支臂43,第二支臂42的两端分别转动连接于第一支臂41的一端和第三支臂43的一端,第一支臂41的另一端转动连接于机身10,第三支臂43上设有夹持装置30,其中,第二支臂42与第一支臂41之间的转轴平行于第二支臂42与第三支臂43之间的转轴,第一支臂41与机身10之间的转轴垂直于第一支臂41与第二支臂42之间的转轴,第一支臂41与机身10转动连接,且二者的转轴水平设置,使得整个机械臂40能够相对机身10作俯仰运动,第一支臂41与第二支臂42转动连接以及第二支臂42与第三支臂43转动连接,使得机械臂40的第三支臂43能够张开或聚拢,以使机械臂40完成更为复杂的动作操作。
25.为了使机械臂40与机身10的连接更为稳固,作业机构还包括固定装置11,固定装置11设于机身10的侧边,固定装置11包括连接部和两个平行设置的固定部,连接部的两端分别连接于两个固定部,使固定装置11的截面呈u形。两个固定部分别位于第一支臂41的两侧,第一支臂41转动连接于固定部,由此,第一支臂41端部的两侧分别转动连接于两个固定部,以防第一支臂41与机身10之间的转轴受到过大的载荷而弯曲或侧倾。
26.如图3,夹持装置30包括机架34和两个相对设置的夹持组件,机架34连接于机械臂40,夹持组件包括第一摇臂31、第二摇臂32和夹持臂33,第一摇臂31的两端分别转动连接于机架34和夹持臂33,第二摇臂32的两端分别转动连接于机架34和夹持臂33,机架34、第一摇臂31、第二摇臂32和夹持臂33形成平行四边形结构。通过现有的执行装置(如电机、电缸、液压缸或气缸)驱动第一摇臂31和/或第二摇臂32,即可使两个夹持臂33相向运动或相背运动,此结构较为简单,便于维修与润滑。同时,第一摇臂31和夹持臂33之间、第一摇臂31和机架34之间、第二摇臂32和夹持臂33之间以及第二摇臂32和机架34之间为面接触,使得承载性能优良。
27.为了使两个夹持臂33的动作保持同步,两个第二摇臂32上分别设有第一齿轮321,两个第二摇臂32的第一齿轮321相啮合。优选的,机架34上设有驱动电机,驱动电机的主轴上设有第二齿轮341,第二齿轮341啮合于其中一个第一齿轮321,驱动电机转动即可通过第
一齿轮321和第二齿轮341驱动两个夹持臂33相向运动或相背运动。
28.进一步的,如图4,机械腿50包括依序设置的第一支腿51、第二支腿52和第三支腿53,第二支腿52的两端分别转动连接于第一支腿51的一端和第三支腿53的一端,第一支腿51的另一端转动连接于机身10,第二支腿52与第一支腿51之间的转轴平行于第二支腿52与第三支腿53之间的转轴,第一支腿51与机身10之间的转轴垂直于第一支腿51与第二支腿52之间的转轴。第一支腿51和机身10之间的转轴竖直设置,这使得机械腿50能够在水平面上相对机身10摆动,第二支腿52的设置使得机械腿50能够实现抬腿动作。在本实施例中,机械腿50的数量设有六个,其中三个机械腿50位于机身10的一侧,其余三个机械腿50位于机身10的另一侧,机身10左侧的前端和后端的机械腿50以及机身10右侧的中部的机械腿50为一组,机身10右侧的前端和后端的机械腿50以及机身10左侧的中部的机械腿50为一组,分别组成三角支撑结构,两组机械腿50分别进行动作,每次移动时均有一组共三个机械腿50支撑地面,保证了救援设备行进过程中的平稳性。
29.摄像装置20的数量设有两个,两个摄像装置20并列设置,摄像装置20可依据实际情况设置云台,使得摄像装置20的摄像方向能够改变。当然,还可在机身10或云台上设置红外探测装置,以在灾区搜索幸存者。
30.此外,机身10的端部设有摆动装置12,摆动装置12活动连接于机身10,在机械腿50运动以使救援设备行进时或机械臂40作业时,摆动装置12能够相对机身10摆动,以保持机身10的平衡,摆动装置12通过铰链活动连接于机身10,摆动装置12和机身10之间设有电机、电缸、液压缸或气缸等执行元件,以驱动摆动装置12相对机身10摆动。
31.综上所述,机身10上设置的多个机械腿50能够使其通过复杂地形,进入受灾区域,机械臂40能够尝试移开路径上的障碍物,且机械臂40安装的夹持装置30可以夹持救灾物资或对受灾人员实施救援作业,摄像装置20则能够拍摄受灾区域的影像以供救灾人员查看。
32.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。