1.本实用新型涉及智能机器人技术领域,更具体涉及一种智能移动协作机器人。
背景技术:
2.机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
3.目前,各生产工厂的智能化、自动化程度越来越高,可移动协作机器人成为工业生产智能化的关键设备,能够灵活地代替一些人力操作。但市面上的移动协作机器人(比如申请号为202111261884.2的中国发明专利)设备整体体积较大,基本应用在物流搬运、上下料和零部件抓取等场合,无法进行远程无线操控,不能进入到交通设施底部、管廊进行一些相对应工作。
技术实现要素:
4.本实用新型需要解决的技术问题是提供一种智能移动协作机器人,以解决背景技术中的问题。
5.为解决上述技术问题,本实用新型所采取的技术方案如下。
6.智能移动协作机器人,包括:
7.agv小车,能够进行移动;
8.电源部分,设置在agv小车内部,电源部分用于为装置整体提供电能;
9.协作机器人,通过连接箱体设置在agv小车上方;
10.工业相机,设置在协作机器人上,用于在协作机器人带动下在空间内移动并对检测点位的拍摄;
11.上位机,与agv小车分体设置,所述上位机用于对agv小车的地图轨迹进行规划,接收agv小车上报信息,将处理后上报信息发布给协作机器人并控制协作机器人动作,采集工业相机的拍摄信息;
12.无线ap组网;所述agv小车通过无线ap组网与上位机交互连接;所述协作机器人的受控端通过无线ap组网连接于上位机的输出端;所述工业相机的输出端通过无线ap组网连接于上位机的输入端。
13.进一步优化技术方案,所述agv小车通过无线ap组网释放的wifi接入到网内,工业相机、协作机器人、上位机分别通过网线连接到无线ap组网的 lan口。
14.进一步优化技术方案,还包括能够对协作机器人进行操控的操控手柄。
15.进一步优化技术方案,所述连接箱体的整体为钣金结构,连接箱体的内部设置两个支撑梁,支撑梁上固定连接有对协作机器人进行定位的协作机器人安装板。
16.进一步优化技术方案,所述连接箱体的内部配置对操控手柄进行存储的存储隔间。
17.进一步优化技术方案,所述工业相机上设置有能够进行角度调节的光圈。
18.由于采用了以上技术方案,本实用新型所取得技术进步如下。
19.本实用新型集成了agv小车、协作机器人和工业相机为一体,设备整体小型化,因本实用新型agv小车、协作机器人和工业相机分别与上位机之间采用无线ap组网无线通讯的方式进行,使得本实用新型能够进行远程无线操控,进而可应用于各类交通设备底部位置、管廊自动巡检,检测螺丝、管道接头、线路有无松动,进行图像采集,缺陷检测,设备自身能够完成图像处理工作,并通过无线网络将结果输出至上位机。
20.与现有的产品相比,agv小车可以实现实景地图绘制,定点路径导航移动,移动过程中可以有效避障,可以控制移动速度,可以进行网络通讯控制移动,或者通过外部io进行物理控制移动;协作机器人的机械手臂可以配置不同终端工具;可以进行图像处理,根据采集的图像,可以实现缺陷检测、图像比对、数量检测和其他类型视觉处理(例如装配异物检测、现场数据读取),检测数据能够进行采集处理。
附图说明
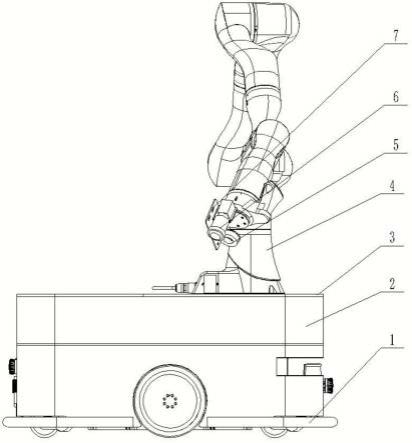
21.图1为本实用新型的结构示意图;
22.图2为本实用新型另一视角的结构示意图;
23.图3为本实用新型连接箱体的结构示意图;
24.图4为本实用新型的原理框图。
25.其中:1、agv小车,2、连接箱体,21、存储隔间,22、协作机器人安装板,3、亚克力装饰板,4、协作机器人,5、光圈,6、工业相机,7、工业相机支架,8、无线ap组网,9、上位机,10、充电桩。
具体实施方式
26.下面将结合附图和具体实施例对本实用新型进行进一步详细说明。
27.智能移动协作机器人,结合图1至图4所示,包括agv小车1、电源部分、协作机器人4、工业相机6、上位机9、无线ap组网8、操控手柄。
28.agv小车1,能够进行移动。agv小车1为装备有自动导航装置,并能够沿规定的导航路径行驶,具有安全保护以及各种移载功能的运输车。agv小车 1为现有的常规结构,此处不再详细赘述。
29.电源部分,设置在agv小车1内部,电源部分用于为装置整体提供电能。电源部分由agv小车1,提供vd48v电源接口,为其它部分提供稳定的直流电源,agv小车1,本身具备蓄电锂电池,单次充电1小时,自身工作8小时,整体工作5小时。agv小车1,在使用过程中出现电量不足时,将移动到充电桩10位置,进行充电工作,当充电完成后,回到原行进路线上,继续之前的工作。
30.协作机器人4通过连接箱体2设置在agv小车1上方,协作机器人4能够在空间内进行移动,协作机器人4为现有的常规结构,此处不再详细赘述。
31.本实用新型还包括能够对协作机器人4进行操控的操控手柄,协作机器人4 的受控端分别通过无线ap组网连接于操控手柄的输出端,操控手柄与上位机9 之间进行信息交互。
32.连接箱体2的底端通过螺栓与agv小车1固定,连接箱体2的顶端通过螺栓与协作机器人4固定。
33.连接箱体2的整体为钣金结构,连接箱体2的内部设置两个支撑梁,支撑梁上固定连接有对协作机器人4进行定位的协作机器人安装板22,保证了连接箱体整体结构的稳定性。
34.连接箱体的上面通过螺栓进行连接固定有亚克力装饰板3,亚克力装饰板3 的颜色为黑色,增加箱体整体的美观性。
35.连接箱体2的内部配置对操控手柄进行存储的存储隔间21。
36.工业相机6设置在协作机器人4上,用于在协作机器人带动下在空间内移动并对检测点位的拍摄。
37.工业相机6上设置有光圈5,工业相机和光圈通过螺栓固定到工业相机支架 7上,光圈5可以自由调整角度,并且直接照射环形光源,垂直照射360
°
无阴影,工业相机支架通过螺栓与协作机器人末端进行连接。
38.上位机9,与agv小车1分体设置,上位机9用于对agv小车1的地图轨迹进行规划,接收agv小车1上报信息,将处理后上报信息发布给协作机器人4并控制协作机器人4动作,采集工业相机6的拍摄信息。
39.无线ap组网放置到连接箱体内,agv小车1通过无线ap组网与上位机9 交互连接。协作机器人4的受控端通过无线ap组网连接于上位机9的输出端;工业相机6的输出端通过无线ap组网连接于上位机9的输入端。
40.具体地,agv小车1通过无线ap组网释放的wifi接入到网内;工业相机通过网线连接到无线ap组网的lan口,接入网络;协作机器人通过网线连接到无线ap组网的lan口,接入网络;上位机同样通过网线接入无线ap组网的lan口,接入网络;通过这种方式将所有需要通讯部分,全部接入都同一网络内进行工作。
41.本实用新型的工作过程为:
42.由上位机规划agv小车的地图轨迹,根据现场需求在地图上标记定位点,并配置上报指令;上位机接收到agv小车的上报信息,进行信息处理并将处理结果形成指令发布给协作机器人,此时,协作机器人根据上位机发布的指令,将协作机器人上携带的工业相机移动到指定位置,并对准焦距,反馈移动到位指令给上位机;上位机再次根据协作机器人反馈的指令信息,发布拍照指令,控制工业相机拍摄对准位置的图片,并保存到上位机指定内存中,反馈拍摄完成信息;上位机根据工业相机反馈的完成拍照信息,给agv小车发布移动指令,此时agv小车移动到下一个拍照位置,完成点位采集工作,工作流程与上述相同。
43.当图像采集工作完成后,上位机将进行图像处理工作,可以进行诸如防松检测、位置检测、缺陷检测、温湿度检测、距离检测等工作。
44.当全部工作完成后,agv小车自动回到预备位置后,停机休眠。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。