1.本实用新型涉及电力工程技术领域,具体涉及一种电力系统远程值守机器人。
背景技术:
2.在电力系统的运行维护工作中,现场值守仍是重要的技术环节。由于电力系统运行情况复杂,故障类别多样,而且故障往往突发且具有较大的危害性,因此目前仍采用现场值守的方式起到保障作用。然而,现场值守的模式占用人力较多且具有一定的危险性,而且,对于值守人员来说,未必能够对突发事件做出正确处置。
3.针对以上问题,本领域研究者尝试采用机器人进行现场值守,而运维人员在后台进行远程监控,这样不仅能够以较少的人力同时监控多个值守位点,而且当突发事件发生时,运维人员不会因身处危险而做出错误处置。然而,这对机器人的感知能力、运动能力以及处置功能都提出了较高要求。目前,常规机器人在感知能力以及运动自由度等方面均有待改善,而且普遍只能进行报警,而且不具有基本的应急干预功能。
技术实现要素:
4.本实用新型旨在针对现有技术的技术缺陷,提供一种电力系统远程值守机器人,以解决常规值守机器人的感知能力以及运动自由度有待改善的技术问题。
5.本实用新型要解决的另一技术问题是,常规值守机器人不具有基本的应急干预功能。
6.为实现以上技术目的,本实用新型采用以下技术方案:
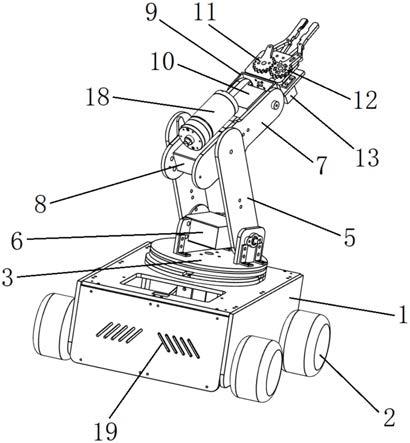
7.电力系统远程值守机器人,包括仓体,车轮,转盘,第一电机,下段臂,第二电机,中段臂,第三电机,上段臂,第四电机,从动齿轮,主动齿轮,第五电机,前凸杆,伸缩杆,夹指,低位摄像机,高位摄像机,通气孔,安装架,其中,在仓体的侧端设置有若干车轮,在仓体的顶端设置有转盘,第一电机与转盘传动连接,在转盘上铰接有下段臂,在下段臂与转盘的铰接轴处设置有第二电机,在下段臂上铰接有中段臂,在中段臂与下段臂的铰接轴处设置有第三电机,在中段臂上铰接有上段臂,在上段臂与中段臂的铰接轴处设置有第四电机,在上段臂上分别转动连接有从动齿轮和主动齿轮,从动齿轮和主动齿轮相互啮合,第五电机与主动齿轮传动连接,在从动齿轮上以及主动齿轮上分别具有前凸杆,在上段臂上铰接有两个伸缩杆,两个夹指的中部分别铰接在两个伸缩杆上,两个夹指的后端分别与两个前凸杆铰接,在仓体的前端固定连接有低位摄像机,在中段臂或上段臂上固定连接有高位摄像机,在仓体上开设有若干通气孔,在仓体的内壁上固定连接有若干安装架。
8.作为优选,还包括烟气传感器,可燃气体传感器,六氟化硫传感器,所述烟气传感器、可燃气体传感器、六氟化硫传感器分别固定连接在安装架上。
9.作为优选,在仓体中内置有电池,所述电池分别为第一电机、第二电机、第三电机、第四电机、第五电机、低位摄像机、高位摄像机供电。
10.作为优选,在仓体中内置有第六电机,所述第六电机与车轮传动连接。
11.作为优选,在仓体的内部设置有风机。
12.在以上技术方案中,仓体为本实用新型的基础结构,一方面起到承载作用,另一方面可用于容纳传感器;车轮与仓体共同形成车体结构,实现本实用新型的运动能力;转盘在第一电机驱动下沿竖直轴旋转,从而提供第一个自由度的运动能力;转盘上的下段臂可在第二电机驱动下旋转,从而提供第二自由度的运动能力;下段臂上的中段臂可在第三电机驱动下旋转,从而提供第三自由度的运动能力;中段臂上的上段臂可在第四电机驱动下旋转,从而提供第四自由度的运动能力;上段臂上的从动齿轮和主动齿轮相互啮合,当第五电机驱动主动齿轮时,可实现从动齿轮和主动齿轮的同步、反向旋转;位于从动齿轮和主动齿轮上的两个前凸杆分别对两个夹指的后端起到驱动作用,由于两个夹指的中部分别铰接在两个伸缩杆上,因此当两个夹指的后端受两个前凸杆驱动时,两个夹指的前端会形成开合运动,从而可实现夹持功能;位于仓体前端的低位摄像机用于拍摄路面情况,为工作人员远程遥控本实用新型移动提供视野;位于中段臂或上段臂上的高位摄像机用于拍摄夹指处的图像,为工作人员远程遥控本实用新型执行夹取动作提供视野;通气孔用于供气流可以进出仓体,从而使仓体内的传感器可以接触外界空气;安装架用于安装烟气传感器、可燃气体传感器、六氟化硫传感器等元件,用于及时发现危险信号。
13.本实用新型提供了一种电力系统远程值守机器人。该技术方案以可移动的车体作为主体结构,并搭载了多自由度的机械手和传感器,从而提升了设备的感知能力并赋予其一定的应急干预功能。具体来看,本实用新型在车体上设置转盘,将三轴机械手搭载于转盘上,从而形成四自由度的运动机构,机械手前端设置机械夹指,可在危急情况下触发强制断电或报警等功能。同时,采用高位、低位两台摄像机分别采集行进画面和动作画面,使工作人员可进行远程遥控;这种远程遥控的模式不仅节省了人力,而且当发生危险情况时可保证人员安全。此外,本实用新型在仓体中增设了传感器,可及时发现短路燃烧、六氟化硫泄漏等问题,对保证电力系统安全运行具有积极意义。
附图说明
14.图1是本实用新型整体从一个视角观察的立体图;
15.图2是本实用新型整体从另一视角观察的立体图;
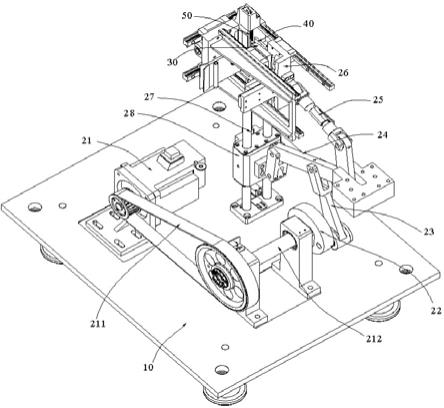
16.图3是本实用新型中,仓体内部的立体图;
17.图4是本实用新型中,夹指及其驱动机构的立体图;
18.图中:
19.1、仓体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2、车轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3、转盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4、第一电机
20.5、下段臂
ꢀꢀꢀꢀꢀꢀꢀꢀ
6、第二电机
ꢀꢀꢀꢀꢀꢀ
7、中段臂
ꢀꢀꢀꢀꢀꢀꢀꢀ
8、第三电机
21.9、上段臂
ꢀꢀꢀꢀꢀꢀꢀꢀ
10、第四电机
ꢀꢀꢀꢀꢀ
11、从动齿轮
ꢀꢀꢀꢀꢀ
12、主动齿轮
22.13、第五电机
ꢀꢀꢀꢀꢀ
14、前凸杆
ꢀꢀꢀꢀꢀꢀꢀ
15、伸缩杆
ꢀꢀꢀꢀꢀꢀꢀ
16、夹指
23.17、低位摄像机
ꢀꢀꢀ
18、高位摄像机
ꢀꢀꢀ
19、通气孔
ꢀꢀꢀꢀꢀꢀꢀ
20、安装架。
具体实施方式
24.以下将对本实用新型的具体实施方式进行详细描述。为了避免过多不必要的细节,在以下实施例中对属于公知的结构或功能将不进行详细描述。以下实施例中所使用的
近似性语言可用于定量表述,表明在不改变基本功能的情况下可允许数量有一定的变动。除有定义外,以下实施例中所用的技术和科学术语具有与本实用新型所属领域技术人员普遍理解的相同含义。
25.实施例1
26.电力系统远程值守机器人,如图1~4所示,包括仓体1,车轮2,转盘3,第一电机4,下段臂5,第二电机6,中段臂7,第三电机8,上段臂9,第四电机10,从动齿轮11,主动齿轮12,第五电机13,前凸杆14,伸缩杆15,夹指16,低位摄像机17,高位摄像机18,通气孔19,安装架20,其中,在仓体1的侧端设置有若干车轮2,在仓体1的顶端设置有转盘3,第一电机4与转盘3传动连接,在转盘3上铰接有下段臂5,在下段臂5与转盘3的铰接轴处设置有第二电机6,在下段臂5上铰接有中段臂7,在中段臂7与下段臂5的铰接轴处设置有第三电机8,在中段臂7上铰接有上段臂9,在上段臂9与中段臂7的铰接轴处设置有第四电机10,在上段臂9上分别转动连接有从动齿轮11和主动齿轮12,从动齿轮11和主动齿轮12相互啮合,第五电机13与主动齿轮12传动连接,在从动齿轮11上以及主动齿轮12上分别具有前凸杆14,在上段臂9上铰接有两个伸缩杆15,两个夹指16的中部分别铰接在两个伸缩杆15上,两个夹指16的后端分别与两个前凸杆14铰接,在仓体1的前端固定连接有低位摄像机17,在中段臂7或上段臂9上固定连接有高位摄像机18,在仓体1上开设有若干通气孔19,在仓体1的内壁上固定连接有若干安装架20。
27.该设备的结构特点如下:仓体1为本实用新型的基础结构,一方面起到承载作用,另一方面可用于容纳传感器;车轮2与仓体1共同形成车体结构,实现本实用新型的运动能力;转盘3在第一电机4驱动下沿竖直轴旋转,从而提供第一个自由度的运动能力;转盘3上的下段臂5可在第二电机6驱动下旋转,从而提供第二自由度的运动能力;下段臂5上的中段臂7可在第三电机8驱动下旋转,从而提供第三自由度的运动能力;中段臂7上的上段臂9可在第四电机10驱动下旋转,从而提供第四自由度的运动能力;上段臂9上的从动齿轮11和主动齿轮12相互啮合,当第五电机13驱动主动齿轮12时,可实现从动齿轮11和主动齿轮12的同步、反向旋转;位于从动齿轮11和主动齿轮12上的两个前凸杆14分别对两个夹指16的后端起到驱动作用,由于两个夹指16的中部分别铰接在两个伸缩杆15上,因此当两个夹指16的后端受两个前凸杆14驱动时,两个夹指16的前端会形成开合运动,从而可实现夹持功能;位于仓体1前端的低位摄像机17用于拍摄路面情况,为工作人员远程遥控本实用新型移动提供视野;位于中段臂7或上段臂9上的高位摄像机18用于拍摄夹指处的图像,为工作人员远程遥控本实用新型执行夹取动作提供视野;通气孔19用于供气流可以进出仓体1,从而使仓体1内的传感器可以接触外界空气;安装架20用于安装烟气传感器、可燃气体传感器、六氟化硫传感器等元件,用于及时发现危险信号。
28.实施例2
29.电力系统远程值守机器人,如图1~4所示,包括仓体1,车轮2,转盘3,第一电机4,下段臂5,第二电机6,中段臂7,第三电机8,上段臂9,第四电机10,从动齿轮11,主动齿轮12,第五电机13,前凸杆14,伸缩杆15,夹指16,低位摄像机17,高位摄像机18,通气孔19,安装架20,其中,在仓体1的侧端设置有若干车轮2,在仓体1的顶端设置有转盘3,第一电机4与转盘3传动连接,在转盘3上铰接有下段臂5,在下段臂5与转盘3的铰接轴处设置有第二电机6,在下段臂5上铰接有中段臂7,在中段臂7与下段臂5的铰接轴处设置有第三电机8,在中段臂7
上铰接有上段臂9,在上段臂9与中段臂7的铰接轴处设置有第四电机10,在上段臂9上分别转动连接有从动齿轮11和主动齿轮12,从动齿轮11和主动齿轮12相互啮合,第五电机13与主动齿轮12传动连接,在从动齿轮11上以及主动齿轮12上分别具有前凸杆14,在上段臂9上铰接有两个伸缩杆15,两个夹指16的中部分别铰接在两个伸缩杆15上,两个夹指16的后端分别与两个前凸杆14铰接,在仓体1的前端固定连接有低位摄像机17,在中段臂7或上段臂9上固定连接有高位摄像机18,在仓体1上开设有若干通气孔19,在仓体1的内壁上固定连接有若干安装架20。同时,还包括烟气传感器,可燃气体传感器,六氟化硫传感器,所述烟气传感器、可燃气体传感器、六氟化硫传感器分别固定连接在安装架20上。在仓体1中内置有电池,所述电池分别为第一电机4、第二电机6、第三电机8、第四电机10、第五电机13、低位摄像机17、高位摄像机18供电。在仓体1中内置有第六电机,所述第六电机与车轮2传动连接。在仓体1的内部设置有风机。
30.以上对本实用新型的实施例进行了详细说明,但所述内容仅为本实用新型的较佳实施例,并不用以限制本实用新型。凡在本实用新型的申请范围内所做的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。