1.本发明涉及手臂康复训练技术领域,特别涉及一种手臂康复辅助设备。
背景技术:
2.手臂受伤(如手臂骨折、或手臂韧带拉伤)的病人大多需要进行手术治疗,手术治疗之后的康复训练也是极为重要的。若手术后的病人的手臂长期处于不运动的状态,手臂的肌肉会逐渐萎缩,故在手术后对病人的手臂进行针对性的康复锻炼是十分有必要的,能够加速病人手臂的恢复,促进手臂机能复原。
3.现有专利中,专利号为:zl201811192741.9,专利名称为《一种医疗用手臂康复训练装置》,背景技术提到:“上肢受到伤害在通过手臂康复训练装置进行康复训练的过程中多在空气中进行,由于患者的肢体力量较小,在训练过程中容易发生脱手的情况,在空气中容易导致手臂与周围的物体发生碰撞或者手臂受力突然的变化而造成二次伤害。”,产生的有益效果是:“升降装置既可以方便患者进入或者离开玻璃水箱,同时又可以在患者进行锻炼的过程中为患者作为座位使用,方便患者锻炼。消毒和加热装置可以对进入玻璃水箱的水进行消毒和加热作业,避免患者之间的交叉感染。玻璃水箱安装的照明装置和扬声器能为患者提供良好的灯光和声音氛围,使患者的心情得到极大的放松。患者在水中进行锻炼时在发生脱手时由于水的粘滞系数较大而使患者的肢体在较短的距离内得到一定的缓冲,确保患者的上肢不在发生二次伤害,总的,本发明具有结构简单,操作方便的优点。”但是同样的在患者使用时,水也会产生很大的阻力,对于受伤严重,刚开始进行康复训练的患者,会非常吃力,可能会造成二次损伤。
4.现有专利中,专利号为:zl202021637813.9,专利名称为《一种术后手臂康复辅助锻炼器材》,背景技术提到:“现有的手臂锻炼器材基本都是针对正常人使用的健身器材,没有专用于手臂术后康复的锻炼器材”有益效果提到:“能够对患者术后的手臂康复进行辅助锻炼,利于患者手臂的快速恢复;具体的,使用时,使用者将一手臂依次穿过第一固定套和第二固定套,使得第一固定套对手臂的大臂进行固定,第二固定套对手臂的小臂进行固定,然后启动第一电机,第一电机驱动第一滑轮旋转,因第一绳索缠绕于第一滑轮,使得第一绳索向上运动,从而带动第二板向上转动,第二板向上运动的同时还能带动第一板向上转动,从而使得放置于第一板和第二板的手臂抬升,以此实现对手臂的抬升运动,抬升至一定高度后,反转第一电机,第一绳索向下运动,使得第一板而后第二板向下转动,从而使得手臂向下运动,即通过正转和反转第一电机,实现手臂的抬升和下降运动,以此实现对术后患者的手臂的康复锻炼,加速患者手臂机能恢复。”,但是术后患者手臂的康复锻炼并不是简单的通过手臂抬升和下降运动就能恢复的,还需要对患者受伤手臂的腕部以及肩部进行相应的协调性训练,从而与手臂进行协调运动,以此使患者手臂机能恢复。
5.现有专利中,专利号为:zl202120852826.6,专利名称为:《手臂康复辅助训练装置》,背景技术提到:“现有的手臂康复训练装置多采用负重训练的形式,通过对手臂进行适当的负重训练,使手臂得到适宜程度的锻炼,以提高手臂的康复速度。但是,手臂在康复训
练前和训练后,都需要一定的辅助手段进行配合,防止手臂突然进行高强度训练对手臂造成一定的损伤。”,有益效果提到:“该手臂康复辅助训练装置,通过按摩电机带动转轴转动,使转轴带动与其连接的按摩轮和皮带轮转动,从而通过传动带带动多个皮带轮和按摩轮转动,从而,通过椭圆形的按摩轮的转动和按摩弹簧的伸缩,推动转动块和转动杆往复运动,从而带动多个按摩球在按摩口内往复运动,从而在手臂康复训练前后,将手臂放置在两个按摩座之间,通过按摩球对手臂肌肉进行按压式按摩,从而使手臂肌肉得到一定的放松,从而提高手臂康复训练的效果。”,但是其只能对手臂中的一点进行按压式按摩,而没法完成手臂协调性的训练,患者还需要消耗时间去对手臂协调性进行训练,非常的消耗时间。
6.现有专利中,专利号为:zl201922367724.0,专利名称为《一种手臂康复辅助机器人》,背景技术中提到:“现有技术中,患者自身单一重复性地进行肢体运动会产生疲劳,难以有效地达到康复训练目的;而现有的康复仪器个体适应性较差,难以根据不同患者做出康复辅助调整;另外,现有的康复仪器需要设置两套训练装置对患者的双臂进行训练,使得设备成本较高,不利于推广”,有益效果中提到:“其能够根据不同患者的体型信息作出调整,提高了本技术的适应性;能够根据需求调整训练单元的安装位置,以对患者康复中的手臂进行辅助训练,降低了康复辅助设备的生产成本;且能够在翻转驱动电机和弯转驱动电机的作用下,规律地对患者手臂进行翻转运动和弯转运动,减少了患者康复训练中的疲劳度。本实用新型结构简单、运行稳定且辅助效果好,具有较高的实用价值。”,但是其无法对患者手腕进行同步训练,而握力通常通过手腕与小臂进行发力,该专利无法对此进行训练,同时,当患者两手臂都受伤时,只能一只手臂一只手臂的进行康复训练,会消耗大量时间,并且也无法对两只手臂的协调进行训练(例如:一只手臂向上,另一只手臂向下的训练),难以有效地达到康复训练目的。
7.因此为了解决这些问题,设计一种手臂康复辅助设备是非常有必要的。
技术实现要素:
8.本发明要解决了现有技术中对于受伤严重,刚开始进行康复训练的患者,会非常吃力,可能会造成二次损伤,不能进行协调运动的技术问题,提供一种手臂康复辅助设备。
9.为了解决上述技术问题,本发明的技术方案具体如下:
10.一种手臂康复辅助设备,包括:
11.底座,所述底座用于将该设备固定在预设位置;
12.座椅结构,所述座椅结构安置于底座上表面后端;
13.一对手臂支撑架,一对所述手臂支撑架安置于底座上表面,且位于所述座椅结构两侧;
14.升降支架,所述升降支架安置于底座上表面,所述升降支架位于座椅结构后端,所述升降支架可带动设置在升降支架上的手臂康复辅助结构从第一预设位置上升到第二预设位置;
15.所述手臂康复辅助结构安置于升降支架上,所述手臂康复辅助结构可带动手腕、手肘以及肩膀进行活动,并对手臂进行康复运动,且所述手臂康复辅助结构与手臂支撑架相匹配。
16.优选的,所述座椅结构包括:升降部以及座椅部;
17.所述升降部安置于底座上表面,所述座椅部安置于升降部上表面。
18.优选的,所述升降部包括:两对第一电控升降杆;
19.两对所述第一电控升降杆安置于底座上表面,且每个所述第一电控升降杆伸缩端向上。
20.所述座椅部包括:座椅以及一对可调节固定带;
21.所述座椅安置于两对所述第一电控升降杆伸缩端上,一对所述可调节固定带安置于座椅上。
22.优选的,所述升降支架包括:一对第二电控升降杆以及支撑架;
23.一对所述第二电控升降杆安置于底座上表面后端,所述第二电控升降杆伸缩端向上,且一对所述第二电控升降杆位于座椅后侧,所述支撑架安置于一对所述第二电控升降杆上表面。
24.优选的,所述手臂支撑架包括:一对电控升降支撑杆、一对u型支撑杆以及两对支撑壳体;
25.一对所述电控升降支撑杆安置于底座上表面,且一对所述电控升降支撑杆位于座椅两侧前端,每个所述u型支撑杆安置于相对应的电控升降支撑杆上表面,每对所述支撑壳体安置于相对应的u型支撑杆上表面。
26.优选的,所述手臂康复辅助结构包括:一对第一手臂康复辅助部、一对握力部、一对固定部以及一对第二手臂康复辅助部;
27.一对所述第一手臂康复辅助部安置于支撑架前表面,且一对所述第一手臂康复辅助部位于座椅两侧,并与所述手臂支撑架相匹配,每个所述握力部安置于第一手臂康复辅助部手掌握持处,每个所述固定部安置于相对应的第一手臂康复辅助部上,每个所述第二手臂康复辅助部安置于相对应的第一手臂康复辅助部上。
28.优选的,所述第一手臂康复辅助部包括:第一旋转电机、转动支撑板、第一u型支撑块、第二旋转电机、第一防护壳体、第一转动板、第一伸缩固定部、第二u型支撑块、第三旋转电机、第二防护壳体、第二转动板、第二伸缩固定部、第三u型支撑块、第四旋转电机、第三防护壳体、转动块以及固定支撑杆;
29.所述第一旋转电机安置于支撑架前表面,所述转动支撑板安置于第一旋转电机旋转端上,所述第一u型支撑块安置于转动支撑板前表面,所述第二旋转电机安置于第一u型支撑块侧表面,且所述第二旋转电机旋转端穿过第一u型支撑块,所述第一防护壳体安置于第二旋转电机上,所述第一转动板安置于第二旋转电机旋转端上,且所述第一转动板位于第一u型支撑块内,所述第一伸缩固定部安置于第一转动板上,所述第二u型支撑块安置于第一伸缩固定部另一端,所述第三旋转电机安置于第二u型支撑块侧表面,且所述第三旋转电机旋转端穿过第二u型支撑块,所述第二防护壳体安置于第三旋转电机上,所述第二转动板安置于第三旋转电机旋转端上,且所述第二转动板位于第二u型支撑块内,所述第三u型支撑块安置于第二伸缩固定部另一端,所述第四旋转电机安置于第三u型支撑块侧表面,且所述第四旋转电机旋转端穿过第三u型支撑块,所述第三防护壳体安置于第四旋转电机上,所述转动块安置于第四旋转电机旋转端上,且所述转动块位于第三u型支撑块内;
30.所述固定部包括:三个弧形支撑固定壳体以及六对固定绑带;
31.其中一个所述弧形支撑固定壳体安置于第一伸缩固定部上,且该所述弧形支撑固
定壳体与人体大臂相匹配,其中一个所述弧形支撑固定壳体安置于第二伸缩固定部上,且该所述弧形支撑固定壳体与人体小臂相匹配,其中一个所述弧形支撑固定壳体安置于固定支撑杆上,且该所述弧形支撑固定壳体与人体手背相匹配,每对所述固定绑带安置于相对应的弧形支撑固定壳体上,且所述固定绑带用于固定大臂、小臂以及手掌处;
32.所述握力部包括:l型支撑杆以及电子握力器;
33.所述l型支撑杆安置于固定支撑杆上,所述电子握力器安置于l型支撑杆处,且所述电子握力器位于手部握持处;
34.所述第二手臂康复辅助部包括:神经肌肉低频电刺激仪以及若干电极;
35.所述神经肌肉低频电刺激仪安置于底座后表面,三个所述弧形支撑固定壳体内表面设有若干凹槽,每个所述电极安置于若干所述凹槽处;
36.优选的,所述第一伸缩固定部包括:第一伸缩杆以及第一固定卡扣;
37.所述第一固定卡扣安置于第一伸缩杆上,并可通过第一固定卡扣锁住第一伸缩杆的伸缩端;
38.所述第二伸缩固定部包括:第二伸缩杆以及第二固定卡扣;
39.所述第二固定卡扣安置于第二伸缩杆上,并可通过第二固定卡扣锁住第二伸缩杆的伸缩端。
40.优选的,所述底座上设有控制器,所述底座上设有市电接口,所述控制器上设有与电脑连接的连接头。
41.本发明具有以下的有益效果:
42.该一种手臂康复辅助设备可以对手臂进行更好的康复训练,通过第一手臂康复辅助部可两只手臂进行同步协调训练,并可通过第三u型支撑块、第四旋转电机以及转动块对手腕进行康复训练,并通过电子握力器对手掌握持时同步进行训练,手臂支撑架可先期对手臂进行支撑,在将手臂固定在手臂康复辅助结构上,以防止患者长时间平举手臂,手臂康复辅助结构可根据患者手臂长短进行调节,从而使患者手腕关节、手肘关节以及肩膀关节对应手臂康复辅助结构各个位置,座椅结构可根据患者高矮进行调节,从而使患者腿部在接受康复训练时,更加舒适。
附图说明
43.下面结合附图和具体实施方式对本发明作进一步详细说明。
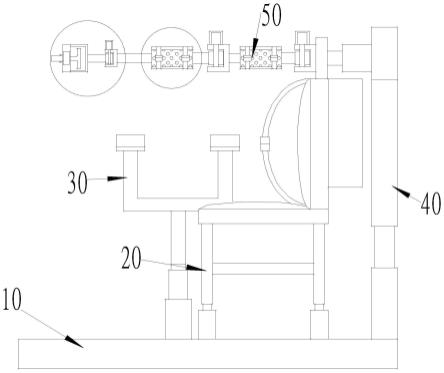
44.图1为本发明的一种手臂康复辅助设备的结构示意图;
45.图2为本发明的一种手臂康复辅助设备的侧视结构图;
46.图3为本发明的一种手臂康复辅助设备的侧视图;
47.图4为本发明的一种手臂康复辅助设备的俯视图;
48.图5为本发明的一种手臂康复辅助设备的局部放大图;
49.图6为本发明的第一手臂康复辅助部的局部发大图。
50.底座10、座椅结构20、手臂支撑架30、升降支架40、手臂康复辅助结构50、控制器60、市电接口70;
51.第一电控升降杆201、座椅202、可调节固定带203;
52.电控升降支撑杆301、u型支撑杆302、支撑壳体303;
53.第二电控升降杆401、支撑架402;
54.第一旋转电机501、转动支撑板502、第一u型支撑块503、第二旋转电机504、第一防护壳体505、第一转动板506、第一伸缩固定部、第二u型支撑块507、第三旋转电机508、第二防护壳体509、第二转动板510、第二伸缩固定部、第三u型支撑块511、第四旋转电机512、第三防护壳体513、转动块514、固定支撑杆515、弧形支撑固定壳体516、固定绑带517、l型支撑杆518、电子握力器519、神经肌肉低频电刺激仪520、电极521、第一伸缩杆522、第一固定卡扣523、第二伸缩杆524、第二固定卡扣525;
55.连接头61。
具体实施方式
56.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
57.请参阅图1-6,底座10,底座10用于将该设备固定在预设位置;座椅结构20,座椅结构20安置于底座10上表面后端;一对手臂支撑架30,一对手臂支撑架30安置于底座10上表面,且位于座椅结构20两侧;升降支架40,升降支架40安置于底座10上表面,升降支架40位于座椅结构20后端,升降支架40可带动设置在升降支架40上的手臂康复辅助结构50从第一预设位置上升到第二预设位置;手臂康复辅助结构50安置于升降支架40上,手臂康复辅助结构50可带动手腕、手肘以及肩膀进行活动,并对手臂进行康复运动,且手臂康复辅助结构50与手臂支撑架30相匹配。
58.通过底座将该手臂康复辅助设备固定在预设位置上,根据患者的身高去调节座椅结构20,然后轻抬患者手臂,将患者手臂放到手臂支撑架30上,在调整手臂支撑架30使患者手臂平行,之后调节升降支架40使手臂康复辅助结构50调整到合适高度,从而对患者手臂固定,然后降下手臂支撑架30后,手臂康复辅助结构50对手臂进行康复训练。
59.优选的,座椅结构20包括:升降部以及座椅部;升降部安置于底座10上表面,座椅部安置于升降部上表面。升降部包括:两对第一电控升降杆201;两对第一电控升降杆201安置于底座10上表面,且每个第一电控升降杆201伸缩端向上。座椅部包括:座椅202以及一对可调节固定带203;座椅202安置于两对第一电控升降杆201伸缩端上,一对可调节固定带203安置于座椅202上。
60.通过第一电控升降杆201从而调整座椅202的高低,座椅202上的可调节固定带203可以有效的对座椅202上的患者进行限位,从而防止患者在康复训练期间活动,从而放生意外。
61.优选的,升降支架40包括:一对第二电控升降杆401以及支撑架402;一对第二电控升降杆401安置于底座10上表面后端,第二电控升降杆401伸缩端向上,且一对第二电控升降杆401位于座椅202后侧,支撑架402安置于一对第二电控升降杆401上表面。
62.通过第二电控升降杆401调节支撑架402位置,从而调整手臂支撑架30高低。
63.优选的,手臂支撑架30包括:一对电控升降支撑杆301、一对u型支撑杆302以及两对支撑壳体303;一对电控升降支撑杆301安置于底座10上表面,且一对电控升降支撑杆301
位于座椅202两侧前端,每个u型支撑杆302安置于相对应的电控升降支撑杆301上表面,每对支撑壳体303安置于相对应的u型支撑杆302上表面。
64.通过电控升降支撑杆301调整升降高度,电控升降支撑杆301上的u型支撑杆302用于支撑支撑壳体303,u型支撑杆302上表面的支撑壳体303用于支撑患者手臂。
65.优选的,手臂康复辅助结构50包括:一对第一手臂康复辅助部、一对握力部、一对固定部以及一对第二手臂康复辅助部;一对第一手臂康复辅助部安置于支撑架402前表面,且一对第一手臂康复辅助部位于座椅202两侧,并与手臂支撑架30相匹配,每个握力部安置于第一手臂康复辅助部手掌握持处,每个固定部安置于相对应的第一手臂康复辅助部上,每个第二手臂康复辅助部安置于相对应的第一手臂康复辅助部上。第一手臂康复辅助部包括:第一旋转电机501、转动支撑板502、第一u型支撑块503、第二旋转电机504、第一防护壳体505、第一转动板506、第一伸缩固定部、第二u型支撑块507、第三旋转电机508、第二防护壳体509、第二转动板510、第二伸缩固定部、第三u型支撑块511、第四旋转电机512、第三防护壳体513、转动块514以及固定支撑杆515;第一旋转电机501安置于支撑架402前表面,转动支撑板502安置于第一旋转电机501旋转端上,第一u型支撑块503安置于转动支撑板502前表面,第二旋转电机504安置于第一u型支撑块503侧表面,且第二旋转电机504旋转端穿过第一u型支撑块503,第一防护壳体505安置于第二旋转电机504上,第一转动板506安置于第二旋转电机504旋转端上,且第一转动板506位于第一u型支撑块503内,第一伸缩固定部安置于第一转动板506上,第二u型支撑块507安置于第一伸缩固定部另一端,第三旋转电机508安置于第二u型支撑块507侧表面,且第三旋转电机508旋转端穿过第二u型支撑块507,第二防护壳体509安置于第三旋转电机508上,第二转动板510安置于第三旋转电机508旋转端上,且第二转动板510位于第二u型支撑块507内,第三u型支撑块511安置于第二伸缩固定部另一端,第四旋转电机512安置于第三u型支撑块511侧表面,且第四旋转电机512旋转端穿过第三u型支撑块511,第三防护壳体513安置于第四旋转电机512上,转动块514安置于第四旋转电机512旋转端上,且转动块514位于第三u型支撑块511内;固定部包括:三个弧形支撑固定壳体516以及六对固定绑带517;其中一个弧形支撑固定壳体516安置于第一伸缩固定部上,且该弧形支撑固定壳体516与人体大臂相匹配,其中一个弧形支撑固定壳体516安置于第二伸缩固定部上,且该弧形支撑固定壳体516与人体小臂相匹配,其中一个弧形支撑固定壳体516安置于固定支撑杆515上,且该弧形支撑固定壳体516与人体手背相匹配,每对固定绑带517安置于相对应的弧形支撑固定壳体516上,且固定绑带517用于固定大臂、小臂以及手掌处;握力部包括:l型支撑杆518以及电子握力器519;l型支撑杆518安置于固定支撑杆515上,电子握力器519安置于l型支撑杆518处,且电子握力器519位于手部握持处;第二手臂康复辅助部包括:神经肌肉低频电刺激仪520以及若干电极521;神经肌肉低频电刺激仪520安置于底座10后表面,三个弧形支撑固定壳体516内表面设有若干凹槽,每个电极521安置于若干凹槽处;第一伸缩固定部包括:第一伸缩杆522以及第一固定卡扣523;第一固定卡扣523安置于第一伸缩杆522上,并可通过第一固定卡扣523锁住第一伸缩杆522的伸缩端;第二伸缩固定部包括:第二伸缩杆524以及第二固定卡扣525;第二固定卡扣525安置于第二伸缩杆524上,并可通过第二固定卡扣525锁住第二伸缩杆524的伸缩端。
66.通过弧形支撑固定壳体516以及固定绑带517对患者手臂进行固定,第一旋转电机501负责转动手臂,第二旋转电机504带动第一转动板506模拟肩膀关节,第三旋转电机508
带动第二转动板510模拟手肘关节,第四旋转电机512带动转动块514模拟手腕关节,从而进行康复训练,神经肌肉低频电刺激仪520以及电极521可以再手臂康复训练时,对手臂进行低频电刺激,从而达到更好的康复效果,第一伸缩杆522、第一固定卡扣523、第二伸缩杆524以及第二固定卡扣525可根据患者手臂长度进行调节,从而是的手臂康复辅助结构50符合患者使用,可根据患者握力大小,从而通过电子握力器519显示出来,以此判断患者手臂恢复情况。
67.底座10上设有控制器60,底座10上设有市电接口70,控制器60上设有与电脑连接的连接头61。
68.通过控制器60上的连接头61连接电脑,底座10上的市电接口70用于连接电源,通过电脑控制控制器60,从而通过控制器60控制该手臂康复辅助设备。
69.首先,将该设备放置在第一预设位置,通过控制器60上的连接头61连接电脑,通过底座10的市电接口70连接电源,然后患者坐在座椅202上,调节底座10上的第一电控升降杆201,从而带动座椅202升降,以此使患者腿部舒张开,使患者在坐着时没那么难受,在通过可调节固定带203在患者固定在座椅202上,防止患者活动,从而达不到好的活动效果,然后将患者手臂轻轻抬起,放置在支撑壳体303上,然后通过电控升降支撑杆301调节支撑壳体303高低,使支撑壳体303托举患者手臂达到平举状态,调节第一伸缩杆522通过第一固定卡扣523锁住,调节第二伸缩杆524通过第二固定卡扣525锁住,从而使用弧形支撑固定壳体516与患者手臂匹配,使患者可以握把l型支撑杆518上的电子握力器519,然后通过固定绑带517将患者手臂固定在弧形支撑固定壳体516上,固定好后,控制电控升降支撑杆301降下支撑壳体303,然后准备开始进行康复训练,第一旋转电机501带动转动支撑板502可将手臂进行整体翻转,第二旋转电机504带动第一转动板506可将肩膀处关节进行活动,第三旋转电机508带动第二转动板510可将手肘处关节进行活动,第三旋转电机508带动第二转动板510可将手腕处关节进行活动,而两侧可以同时同向对手臂进行活动,也可以同时异向对手臂进行活动,活动同时,打开神经肌肉低频电刺激仪520,电极521对手臂进行低频电刺激,增加手臂康复训练效果,患者握持l型支撑杆518上的电子握力器519,可在医生指导下进行握力测试,数据会显示在电子握力器519上,从而供医生判断手臂情况,非常方便。
70.实施例二:可通过电控伸缩杆替换第一伸缩杆522以及第一固定卡扣523和第二伸缩杆524以及第二固定卡扣525进行调节。
71.实施例三:可通过转动轴替换第二旋转电机504、第三旋转电机508、第四旋转电机512,从而使手臂受伤较轻的患者在医生指导下进行自主康复训练。
72.实施例四:第一旋转电机501、第二旋转电机504、第三旋转电机508、第四旋转电机512可以为步进电动机,从而方便医生在电脑端调节转动角度。
73.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。