技术特征:
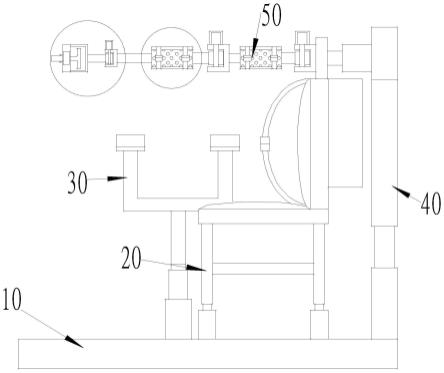
1.一种手臂康复辅助设备,其特征在于,包括:底座(10),所述底座(10)用于将该设备固定在预设位置;座椅结构(20),所述座椅结构(20)安置于底座(10)上表面后端;一对手臂支撑架(30),一对所述手臂支撑架(30)安置于底座(10)上表面,且位于所述座椅结构(20)两侧;升降支架(40),所述升降支架(40)安置于底座(10)上表面,所述升降支架(40)位于座椅结构(20)后端,所述升降支架(40)可带动设置在升降支架(40)上的手臂康复辅助结构(50)从第一预设位置上升到第二预设位置;所述手臂康复辅助结构(50)安置于升降支架(40)上,所述手臂康复辅助结构(50)可带动手腕、手肘以及肩膀进行活动,并对手臂进行康复运动,且所述手臂康复辅助结构(50)与手臂支撑架(30)相匹配。2.根据权利要求1所述的一种手臂康复辅助设备,其特征在于,所述座椅结构(20)包括:升降部以及座椅部;所述升降部安置于底座(10)上表面,所述座椅部安置于升降部上表面。3.根据权利要求2所述的一种手臂康复辅助设备,其特征在于,所述升降部包括:两对第一电控升降杆(201);两对所述第一电控升降杆(201)安置于底座(10)上表面,且每个所述第一电控升降杆(201)伸缩端向上。所述座椅部包括:座椅(202)以及一对可调节固定带(203);所述座椅(202)安置于两对所述第一电控升降杆(201)伸缩端上,一对所述可调节固定带(203)安置于座椅(202)上。4.根据权利要求3所述的一种手臂康复辅助设备,其特征在于,所述升降支架(40)包括:一对第二电控升降杆(401)以及支撑架(402);一对所述第二电控升降杆(401)安置于底座(10)上表面后端,所述第二电控升降杆(401)伸缩端向上,且一对所述第二电控升降杆(401)位于座椅(202)后侧,所述支撑架(402)安置于一对所述第二电控升降杆(401)上表面。5.根据权利要求4所述的一种手臂康复辅助设备,其特征在于,所述手臂支撑架(30)包括:一对电控升降支撑杆(301)、一对u型支撑杆(302)以及两对支撑壳体(303);一对所述电控升降支撑杆(301)安置于底座(10)上表面,且一对所述电控升降支撑杆(301)位于座椅(202)两侧前端,每个所述u型支撑杆(302)安置于相对应的电控升降支撑杆(301)上表面,每对所述支撑壳体(303)安置于相对应的u型支撑杆(302)上表面。6.根据权利要求5所述的一种手臂康复辅助设备,其特征在于,所述手臂康复辅助结构(50)包括:一对第一手臂康复辅助部、一对握力部、一对固定部以及一对第二手臂康复辅助部;一对所述第一手臂康复辅助部安置于支撑架(402)前表面,且一对所述第一手臂康复辅助部位于座椅(202)两侧,并与所述手臂支撑架(30)相匹配,每个所述握力部安置于第一手臂康复辅助部手掌握持处,每个所述固定部安置于相对应的第一手臂康复辅助部上,每个所述第二手臂康复辅助部安置于相对应的第一手臂康复辅助部上。7.根据权利要求6所述的一种手臂康复辅助设备,其特征在于,所述第一手臂康复辅助
部包括:第一旋转电机(501)、转动支撑板(502)、第一u型支撑块(503)、第二旋转电机(504)、第一防护壳体(505)、第一转动板(506)、第一伸缩固定部、第二u型支撑块(507)、第三旋转电机(508)、第二防护壳体(509)、第二转动板(510)、第二伸缩固定部、第三u型支撑块(511)、第四旋转电机(512)、第三防护壳体(513)、转动块(514)以及固定支撑杆(515);所述第一旋转电机(501)安置于支撑架(402)前表面,所述转动支撑板(502)安置于第一旋转电机(501)旋转端上,所述第一u型支撑块(503)安置于转动支撑板(502)前表面,所述第二旋转电机(504)安置于第一u型支撑块(503)侧表面,且所述第二旋转电机(504)旋转端穿过第一u型支撑块(503),所述第一防护壳体(505)安置于第二旋转电机(504)上,所述第一转动板(506)安置于第二旋转电机(504)旋转端上,且所述第一转动板(506)位于第一u型支撑块(503)内,所述第一伸缩固定部安置于第一转动板(506)上,所述第二u型支撑块(507)安置于第一伸缩固定部另一端,所述第三旋转电机(508)安置于第二u型支撑块(507)侧表面,且所述第三旋转电机(508)旋转端穿过第二u型支撑块(507),所述第二防护壳体(509)安置于第三旋转电机(508)上,所述第二转动板(510)安置于第三旋转电机(508)旋转端上,且所述第二转动板(510)位于第二u型支撑块(507)内,所述第三u型支撑块(511)安置于第二伸缩固定部另一端,所述第四旋转电机(512)安置于第三u型支撑块(511)侧表面,且所述第四旋转电机(512)旋转端穿过第三u型支撑块(511),所述第三防护壳体(513)安置于第四旋转电机(512)上,所述转动块(514)安置于第四旋转电机(512)旋转端上,且所述转动块(514)位于第三u型支撑块(511)内;所述固定部包括:三个弧形支撑固定壳体(516)以及六对固定绑带(517);其中一个所述弧形支撑固定壳体(516)安置于第一伸缩固定部上,且该所述弧形支撑固定壳体(516)与人体大臂相匹配,其中一个所述弧形支撑固定壳体(516)安置于第二伸缩固定部上,且该所述弧形支撑固定壳体(516)与人体小臂相匹配,其中一个所述弧形支撑固定壳体(516)安置于固定支撑杆(515)上,且该所述弧形支撑固定壳体(516)与人体手背相匹配,每对所述固定绑带(517)安置于相对应的弧形支撑固定壳体(516)上,且所述固定绑带(517)用于固定大臂、小臂以及手掌处;所述握力部包括:l型支撑杆(518)以及电子握力器(519);所述l型支撑杆(518)安置于固定支撑杆(515)上,所述电子握力器(519)安置于l型支撑杆(518)处,且所述电子握力器(519)位于手部握持处;所述第二手臂康复辅助部包括:神经肌肉低频电刺激仪(520)以及若干电极(521);所述神经肌肉低频电刺激仪(520)安置于底座(10)后表面,三个所述弧形支撑固定壳体(516)内表面设有若干凹槽,每个所述电极(521)安置于若干所述凹槽处。8.根据权利要求7所述的一种手臂康复辅助设备,其特征在于,所述第一伸缩固定部包括:第一伸缩杆(522)以及第一固定卡扣(523);所述第一固定卡扣(523)安置于第一伸缩杆(522)上,并可通过第一固定卡扣(523)锁住第一伸缩杆(522)的伸缩端;所述第二伸缩固定部包括:第二伸缩杆(524)以及第二固定卡扣(525);所述第二固定卡扣(525)安置于第二伸缩杆(524)上,并可通过第二固定卡扣(525)锁住第二伸缩杆(524)的伸缩端。9.根据权利要求1所述的一种手臂康复辅助设备,其特征在于,所述底座(10)上设有控
制器(60),所述底座(10)上设有市电接口(70),所述控制器(60)上设有与电脑连接的连接头(61)。
技术总结
本发明为一种手臂康复辅助设备,涉及手臂康复训练领域,解决了现有技术中对于受伤严重,刚开始进行康复训练的患者,会非常吃力,可能会造成二次损伤,不能进行协调运动的问题。技术特征包括:底座,所述底座用于将该设备固定在预设位置;座椅结构,所述座椅结构安置于底座上表面后端;一对手臂支撑架,一对所述手臂支撑架安置于底座上表面,且位于所述座椅结构两侧。使患者手腕关节、手肘关节以及肩膀关节对应手臂康复辅助结构各个位置,座椅结构可根据患者高矮进行调节,从而使患者腿部在接受康复训练时,更加舒适。更加舒适。更加舒适。
技术研发人员:王南 孙佳丽 杨柏涛 沈佳炜 顾宪强 陈冰
受保护的技术使用者:吉林省微渺医疗科技有限公司
技术研发日:2022.11.22
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。