1.本实用新型涉及一种新型飞盘精准发射机器人。
背景技术:
2.机器人是一种能够半自主或全自动工作的智能设备,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸了人类的活动及能力范围。随着现代科技水平的高速发展,机器人已经不仅仅被应用在工业车间和工厂中了,也被运用到教学和编程体验活动上,以锻炼青少年儿童的动手能力和思维能力。目前最常见的机器人体验活动中,其中一项是要求把大尺寸飞盘发射至指定得分地点,但大尺寸飞盘质量大,采用以往的弹射式发射,发射距离容易过短且方向不容易控制,因此,需要设计一种发射初始速度大且能够调整发射角度的飞盘发射机器人。
技术实现要素:
3.本实用新型所要解决的技术问题是克服现有技术的不足,提供了一种发射初速度大、发射角度可调节且发射角度直观呈现的新型飞盘精准发射机器人。
4.本实用新型所采用的技术方案是:本实用新型包括移动架体、发射角度调整机构、控制台、飞盘发射仓、发射轮动力机构以及飞盘推送助力机构,所述控制台以及所述发射角度调整机构适配设置在所述移动架体上,所述飞盘发射仓、所述发射轮动力机构以及所述飞盘推送助力机构适配设置在所述发射角度调整机构上,所述发射轮动力机构适配置于所述飞盘发射仓的一侧,所述飞盘推送助力机构置于所述飞盘发射仓的后方。
5.所述发射角度调整机构包括单边升降架、连接轴以及升降气缸,所述单边升降架的首端适配铰接在所述移动架体上,所述单边升降架的两边侧壁上适配设置有连接轴活动槽,所述连接轴适配活动横置在两个所述连接轴活动槽内,所述升降气缸固定设置在所述移动架体上,所述升降气缸的输出端适配铰接在所述连接轴上。
6.所述单边升降架与所述移动架体的铰接部上固定设置有角度标尺盘,所述角度标尺盘的外侧面上活动设置有角度指示条,所述角度指示条的末端折弯穿过所述角度标尺盘的中点并与所述所述单边升降架固定连接。
7.所述发射轮动力机构包括发射轮电机、主动传动齿轮、从动传动齿轮以及摩擦发射轮,所述发射轮电机适配固定设置在所述单边升降架上,所述主动传动齿轮适配固定连接在所述发射轮电机的输出端上,所述从动传动齿轮与所述摩擦发射轮同轴转动设置在所述单边升降架上,所述主动传动齿轮与所述从动传动齿轮适配啮合,所述摩擦发射轮置于所述飞盘发射仓的一侧。
8.所述飞盘推送助力机构包括推送气缸、推送助力块,所述推送气缸适配固定设置在所述单边升降架上并置于所述飞盘发射仓的后方,所述推送助力块固定设置在所述推送气缸的输出端上并置于所述飞盘发射仓的后方,所述飞盘发射仓的后方拦板上设置有推送
位,所述推送位与所述推送助力块相适配,所述推送助力块通过所述推送位进入至所述飞盘发射仓内。
9.所述发射轮电机适配固定设置在所述单边升降架的安装梁的顶面上,所述主动传动齿轮适配固定连接在所述发射轮电机的输出端上,所述从动传动齿轮与所述摩擦发射轮同轴转动设置在所述安装梁的底面上,所述主动传动齿轮与所述从动传动齿轮适配啮合,所述摩擦发射轮置于所述飞盘发射仓的一侧。
10.有益效果:在本实用新型中,采用发射角度调整机构对发射的角度进行调整设定,角度也可以直观读取,便于操作者操作掌控;采用发射轮动力机构对飞盘进行摩擦旋转发射,同时在发射前采用飞盘推送助力机构对飞盘添加发射前的初速度,使得飞盘的发射速度更高,射程更远。
附图说明
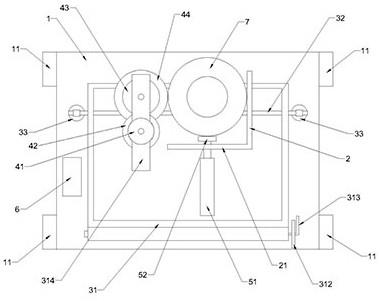
11.图1是本实用新型的整体结构俯视示意图。
具体实施方式
12.如图1所示,本实用新型包括移动架体1、发射角度调整机构、控制台6、飞盘发射仓2、发射轮动力机构以及飞盘推送助力机构,所述控制台6以及所述发射角度调整机构适配设置在所述移动架体1上,所述飞盘发射仓2、所述发射轮动力机构以及所述飞盘推送助力机构适配设置在所述发射角度调整机构上,所述发射轮动力机构适配置于所述飞盘发射仓2的一侧,所述飞盘推送助力机构置于所述飞盘发射仓2的后方。
13.所述发射角度调整机构包括单边升降架31、连接轴32以及升降气缸33,所述单边升降架31的首端适配铰接在所述移动架体1上,所述单边升降架31的两边侧壁上适配设置有连接轴活动槽,所述连接轴32适配活动横置在两个所述连接轴活动槽内,所述升降气缸33固定设置在所述移动架体1上,所述升降气缸33的输出端适配铰接在所述连接轴32上。
14.所述单边升降架31与所述移动架体1的铰接部上固定设置有角度标尺盘312,所述角度标尺盘312的外侧面上活动设置有角度指示条313,所述角度指示条313的末端折弯穿过所述角度标尺盘312的中点并与所述所述单边升降架31固定连接。
15.所述发射轮动力机构包括发射轮电机41、主动传动齿轮42、从动传动齿轮43以及摩擦发射轮44,所述发射轮电机41适配固定设置在所述单边升降架31上,所述主动传动齿轮42适配固定连接在所述发射轮电机41的输出端上,所述从动传动齿轮43与所述摩擦发射轮44同轴转动设置在所述单边升降架31上,所述主动传动齿轮42与所述从动传动齿轮43适配啮合,所述摩擦发射轮44置于所述飞盘发射仓2的一侧。
16.所述飞盘推送助力机构包括推送气缸51、推送助力块52,所述推送气缸51适配固定设置在所述单边升降架31上并置于所述飞盘发射仓2的后方,所述推送助力块52固定设置在所述推送气缸51的输出端上并置于所述飞盘发射仓2的后方,所述飞盘发射仓2的后方拦板21上设置有推送位,所述推送位与所述推送助力块52相适配,所述推送助力块52通过所述推送位进入至所述飞盘发射仓2内。
17.所述发射轮电机41适配固定设置在所述单边升降架31的安装梁314的顶面上,所述主动传动齿轮42适配固定连接在所述发射轮电机41的输出端上,所述从动传动齿轮43与
所述摩擦发射轮44同轴转动设置在所述安装梁314的底面上,所述主动传动齿轮42与所述从动传动齿轮43适配啮合,所述摩擦发射轮44置于所述飞盘发射仓2的一侧。
18.在本具体实施例中,所述摩擦发射轮44所处的平面与所述飞盘发射仓2的飞盘放置底板所处的平面之间的高度差为一个飞盘的高度,多个飞盘堆叠置于所述飞盘发射仓2内,所述摩擦发射轮44只对处于最底层的飞盘起摩擦发射作用,所述推送助力块52也只对处于最底层的飞盘起推送作用。
19.在本具体实施例中,所述移动架体1上还设置有控制箱6、移动轮11以及移动电机,四个所述移动轮11适配均匀设置在所述移动架体1上并与所述移动电机的输出端相连接。所述控制箱6分别与所述移动电机、所述推送气缸51、所述发射轮电机41以及所述升降气缸33电连接。所述控制箱6还通过无线信号与外部操作人员的控制器相连接。
20.工作时,外部操作人员通过外部控制器控制所述移动架体1移动至指定地点,然后再控制所述升降气缸33启动带动所述单边升降架31单边升起,直至所述角度指示条313指到所述角度标尺盘312的预设角度后停止,所述飞轮电机启动并通过所述主动传动齿轮42以及所述从动传动齿轮43的传动作用带动所述摩擦发射轮44以预设转速逆时针转动,外部人员将多个飞盘7堆叠放置在所述飞盘发射仓2内,所述推送气缸51启动并带动所述推送助力块52以一个预设速度往所述飞盘发射仓2内运动,所述推送助力块52穿过所述推送位后接触处于最底层的飞盘7并带动飞盘7往前移动,过程中给予飞盘7一个前移初速度;当飞盘7移动至所述摩擦发射轮44一侧并与所述摩擦发射轮44的摩擦边缘相接触,高速转动中的所述摩擦发射轮44通过摩擦力给予飞盘7向前的力,使其脱离所述飞盘发射仓2反射至指定定点,同时摩擦力也使飞盘7顺时针转动,飞行过程中更加稳定,保持方向的准确性也保持弹道的准确性,同时加上所述推送助力块52给予的初速度,飞盘7发射时的速度会更高,飞行距离更远。
21.本实用新型适用于机器人设计应用领域。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。