1.本公开涉及自动驾驶技术领域,尤其涉及一种防撞装置及全向移动底盘。
背景技术:
2.自动驾驶技术领域中,在测试车辆的极限场景时,为了安全与可控,需要假人假车实现场景的构建;一般采用全向移动底盘充当假人与假车的移动设备,使假人假车能够全方位的移动,但由于会进行一些高危极限场景的测试,自动驾驶车辆有时会撞向假人假车,全向移动底盘的全向轮裸露在外,极易被无人驾驶车辆碰撞,导致全向轮损坏,使测试工作停滞,严重影响测试进度。
3.在相关技术中,一般使用防护壳包裹全向轮的保护方法,虽然能够起到一定的防护作用,但不易拆装,会导致全向轮的维修困难,且不能换装到其他尺寸的全向移动底盘中,不具有普适性;另外,防护壳保护全向轮的方法无法抵抗车辆的撞击力,车辆对底盘的撞击力会转化为全向轮对地面的压力,仍然会对全向轮造成损坏。
技术实现要素:
4.本公开提供了一种用于防撞装置及全向移动底盘。
5.根据本公开的第一方面,提供了一种防撞装置,用于保护全向轮,所述全向轮设置在基座上;所述防撞装置包括:防撞板、支架和弹性缓冲结构;所述支架固定在所述基座上,且所述支架的顶部高于所述全向轮顶部;所述防撞板的第一端铰接在所述基座上;所述弹性缓冲结构设置在所述支架和所述防撞板之间;所述全向轮容纳在所述基座、所述支架和所述防撞板组成的空间内。
6.根据本公开的第二方面,提供了一种全向移动底盘,包括:本公开任一实施例所述的防撞装置、基座和全向轮;所述全向轮设置在所述基座上,且所述全向轮设置在两个所述支撑板之间。
7.本公开提供的防撞装置及全向移动底盘,防撞装置包括防撞板、支架和弹性缓冲结构。全向轮容纳在基座、支架和防撞板组成的空间内,发生撞击时本应落在全向轮上的撞击力落在防撞板上,防撞板受到撞击力后通过铰接在基座上的第一端向下转动,直至防撞板接触到设置在支架与防撞板之间的弹性缓冲结构,通过弹性缓冲结构对撞击力进行缓冲,保护全向轮不受损伤;且由于防撞板是活动铰接在基座上的,在起到保护作用的同时不影响全向轮的维修和换装,降低了全向轮的维修难度并使全向轮具备普适性。
8.应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
附图说明
9.为了更清楚地说明本公开实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本
公开的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的实施例。
10.附图用于更好地理解本方案,不构成对本公开的限定。其中:
11.图1是本公开实施例的全向移动底盘的一种结构示意图;
12.图2是图1仰视视角的结构示意图;
13.图3是图2的局部示意图;
14.图4是图1俯视视角的结构示意图(隐藏本公开实施例的防撞板);
15.图5是图4的局部示意图;
16.图6是本公开实施例的防撞板和支撑块的一种结构示意图;
17.图7是本公开实施例的支撑板的一种结构示意图。
18.附图标记说明:
19.全向移动底盘10;
20.防撞装置100;
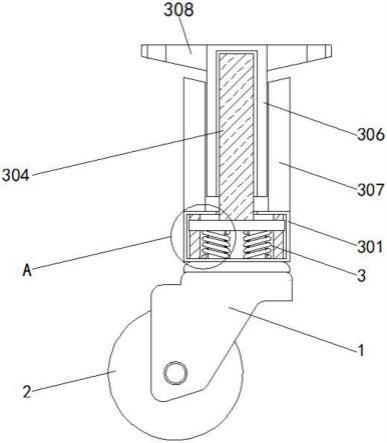
21.防撞板110,第一端111,第二端112,第二连接孔113,承撞面110-a,缓冲面110-b;
22.支架120;
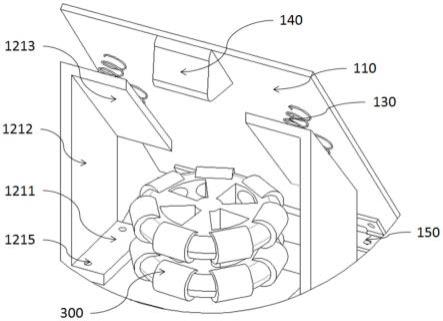
23.支撑板121,连接面1211,支撑梁1212,支撑面1213,固定块1214,第一连接孔1215;
24.弹性缓冲结构130;
25.支撑块140,第一连接面141,第二连接面142,第一棱面143,第二棱面144;
26.活页板150;
27.基座200,底座201,顶盖202;
28.全向轮300。
具体实施方式
29.以下结合附图对本公开的示范性实施例做出说明,其中包括本公开实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本公开的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
30.参见图1至图6,本公开第一方面的实施例提供了一种防撞装置100,用于保护全向轮300,全向轮300设置在基座200上;防撞装置100包括:防撞板110、支架120和弹性缓冲结构130;支架120固定在所述基座200上,且支架120的顶部高于全向轮300顶部;防撞板110的第一端111铰接在基座200上;弹性缓冲结构130设置在支架120和防撞板110之间;全向轮300容纳在基座200、支架120和防撞板110组成的空间内。本公开提供的防撞装置100包括防撞板110、支架120和弹性缓冲结构130。全向轮300容纳在基座200、支架120和防撞板110组成的空间内,通过支架120、防撞板110承受全向轮受到的撞击力,并通过设置在支架120和防撞板110之间的弹性缓冲结构130起到缓冲作用,从而达到保护全向轮300不因撞击受损的目的。支架120和防撞板110的材料均为钢材,钢材强度高、塑性好、变形能力强,可以有较大变形,能很好地承受动力荷载,是用作承撞防护装置的绝佳材料。支架120固定在基座200上,支架120的顶部高于全向轮300顶部,可以完全将全向轮300覆盖在保护空间内;一个例子中,支架120的底部不超过全向轮300的底部,可以与全向轮300的底部平齐或略高于全向
轮300的底部,这样不会影响全向轮300在地面移动;防撞板110的第一端111铰接在基座200上,铰接是一种可以使被连接部件有相对转动能力的连接方式,常用在机器、车辆、门窗、器物的两个部分的装置或零件的连接;将铰接结构用在固定防撞板110上,使防撞板110可以进行相对转动,从而在起到保护作用的同时不影响全向轮300的维修和换装,降低了全向轮300的维修难度并使全向轮300具备普适性。
31.一般情况下,如图1所示,基座200包括底座201和顶盖202两部分,顶盖202连接在底座201上,全向轮300连接在底座201上,支架120固定在底座201上,防撞板110的第一端111铰接在顶盖202上。
32.在本公开的一些实施例中,支架120包括两个支撑板121,两个支撑板121对称设置在基座200的两侧,两个支撑板121顶部分别固定有弹性缓冲结构130。
33.如图5所示,两个支撑板121分别设置在底座201的两侧,固定在全向轮300两侧1cm左右,起到稳固支撑防撞板110的作用并使全向轮300位于两个支撑板121之间。理论上讲,支撑板121与防撞板110之间的弹性缓冲结构130可以任意固定在支撑板121或者防撞板110上,但由于防撞板110可以相对转动,支撑板121固定连接在基座上;因此,将弹性缓冲结构130设置在支撑板121上是为了使弹性缓冲结构130具备稳定性,能够平稳均匀地缓冲撞击力。
34.在本公开的一些实施例中,支撑板121包括连接面1211、支撑梁1212和支撑面1213:连接面1211上设置有第一连接孔1215,第一连接孔1215用于将支撑板121固定在基座200上;支撑面1213上设置有固定块1214,固定块1214用于固定弹性缓冲结构130;支撑梁1212连接在连接面1211和支撑面1213之间。
35.如图3和图7所示,连接面1211上设置的第一连接孔1215,使得支撑板121可以通过螺栓连接在基座底座201上,螺栓连接为可拆卸连接,在需要对损坏的支撑板121进行换装或维修时,仅需将损坏的支撑板121进行单独换装,大大降低了维修难度和维修成本。
36.支撑梁1212连接在连接面1211和支撑面1213之间,形成了一个具有一定高度的空间,在实现支撑防撞板110的同时,使全向轮300有合适的放置空间。
37.在本公开的一些实施例中,如图7所示,连接面1211、支撑梁1212和支撑面1213是经过板材折弯一次成型的,且连接面1211和支撑面1213的折弯方向相同。
38.通过使用板材折弯一次成型的工艺,使支撑板121整体不存在由于焊接缺陷或拼接裂缝导致的强度问题,进一步提升了防撞装置100的稳定性;连接面1211和支撑面1213的折弯方向相同可以节省支撑板121设计空间,使防撞装置100的整体结构更加紧凑。
39.在本公开的一些实施例中,如图3和图7所示,支撑面1213为相对于连接面1211存在倾斜角度的斜面。
40.根据支撑梁1212的高度和基座底座201与基座顶盖202之间的距离,将支撑面1213设置为角度合适的斜面,使防撞板110转动时可以落在支撑面1213上;如果支撑面1213不设置为斜面,防撞板110转动时会落在支撑面1213的一条棱上,使得防撞板110与支撑板121之间的接触面积过小,防撞板110受到撞击时承受的力度增大容易损毁,进而无法达到保护全向轮300免受撞击损伤的目的。
41.在本公开的一些实施例中,弹性缓冲结构130固定在支撑面1213上。
42.弹性缓冲结构130固定在支撑面1213上,使得防撞板110转动时落在固定在支撑面
1213上的弹性缓冲结构130上,起到缓冲撞击力的作用。
43.如图3和图5所示,一个支撑面1213上设置有两个弹性缓冲结构130,多个弹性缓冲结构130与防撞板110接触分散了撞击力度,使防撞板110受力均匀,增大了防撞板110的承撞能力,从而可以更好地保护全向轮300免受撞击损伤。
44.在本公开的一些实施例中,如图1、图4和图6所示,防撞装置100还包括支撑块140,支撑块140固定连接在防撞板的第二端112,第二端112为第一端111的对端;防撞板110包括承撞面110-a和缓冲面110-b:承撞面110-a为远离全向轮300的一面,缓冲面110-b为靠近全向轮300的一面;支撑块140设置在缓冲面110-b上。
45.对端是指在空间中处于相对位置的两端,例如矩形的两个长边互为对端,矩形的两个短边也同样互为对端,一个例子中,如图6所示,防撞板110为矩形板状结构,包括两个长边和两个短边,将两个短边分别设置为防撞板110的第一端111和第二端112。防撞板承撞面110-a受到撞击后,通过铰接在基座顶盖202的第一端111向地面转动,直至缓冲面110-b接触并开始压紧弹性缓冲结构130;当弹性缓冲结构130被压紧到一定程度,设置缓冲面110-b的支撑块140接触到地面,将撞击力部分转换为反方向支撑力,减少全向轮300遭到车辆的碾压时,车辆重量对全向轮300的压力,进一步保护全向轮300在碰撞中不受损伤。
46.在本公开的一些实施例中,如图6所示,支撑块140为三棱柱块,包括第一连接面141、第二连接面142和第三连接面(图中未示出)、第一棱面143和第二棱面144:第一连接面141固定在缓冲面110-b上;第一棱面143设置在第一连接面141和第二连接面142之间,且第一棱面143与防撞板的第二端112相连;第二棱面144设置在第二连接面142与第三连接面之间。
47.支撑块140可以为长方体、圆柱体或三棱柱,三棱柱具有更好的稳定性,将支撑块140设置为三棱柱块,使支撑块140能够稳固地承受撞击带来的碾压力。
48.在本公开的一些实施例中,如图6所示,第一棱面143和第二棱面144均为弧面。
49.将第一棱面143设置为弧面是为了防止撞击力度卸去后,防撞板110出现无法顺利弹起的情况,保证了在没有撞击力的情况下,防撞板110不会接触到地面从而妨碍到全向轮300的移动。
50.在自动驾驶车辆撞向全向轮300的过程中,第二棱面144有接触到自动驾驶车辆轮胎的可能,将第二棱面144设置为弧面可以避免损伤到自动驾驶车辆轮胎。
51.在本公开的一些实施例中,如图3和图5所示,弹性缓冲结构130为弹簧。
52.弹簧不仅在受到撞击时可以起到缓冲撞击力的作用,并且,在撞击力卸去时,被压缩的弹簧会产生回弹力使防撞板110复位,从而不影响全向轮300的移动。
53.在本公开的一些实施例中,如图5所示,防撞板的第一端111通过活页板150铰接在基座200上。
54.如图6所示,防撞板110上设置有与活页板固定连接的第二连接孔113,使得防撞板110可以通过螺栓连接在基座顶盖202上,螺栓连接为可拆卸连接,在需要对损坏的防撞板110进行换装或维修时,仅需将损坏的防撞板110进行单独换装,大大降低了维修难度和维修成本。
55.本公开第二方面的实施例提供了一种全向移动底盘10,包括:上述任一实施例中的防撞装置100、基座200和全向轮300;全向轮300设置在基座200上,且全向轮300设置在两
个支撑板121之间。
56.如图1所示,防撞装置100用于保护全向轮300在碰撞中不受损伤;基座顶盖202也可以理解为基座200的防护板,基座顶盖202固定连接在底座201上,起到保护基座200在碰撞中不受损伤的作用。
57.在本公开的一些实施例中,全向移动底盘10为三角形,三个防撞装置100和三个全向轮300分别设置在全向移动底盘的三个角上。
58.如图2和图4所示,将全向移动底盘10设置为三角形,并将三个防撞装置100和三个全向轮300分别设置在全向移动底盘的三个角上,可以使全向移动底盘10实现全方位移动。
59.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
60.本说明书中的各个实施例均采用相关的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。尤其,对于系统实施例而言,由于其基本相似于方法实施例,所以描述的比较简单,相关之处参见方法实施例的部分说明即可。
61.上述具体实施方式,并不构成对本公开保护范围的限制。本领域技术人员应该明白的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和替代。任何在本公开的精神和原则之内所作的修改、等同替换和改进等,均应包含在本公开保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。