1.本实用新型涉及智慧电厂技术领域,具体为一种基于智慧电厂用智能监盘装置。
背景技术:
2.建设智慧电厂就是在智能发电的基础上,通过发电与其他产业的融合延伸,形成循环经济,提高能源和资源的利用率,承担更多保护环境和服务社会的功能,不仅可以成为电厂参与市场经济的资本,也是新时代生态环境建设和经济社会发展对电力企业的要求,智慧电厂火电机组繁重的发送电任务,安全监控是必不可少的一项工作。在实际运行过程中,人工监盘需要值班人员24小时监视设备的运行状况,因此也带来了几点问题:第一,界面图例较小,监控人员长时间进行监控,容易因疲劳造成误判;第二监控系统界面需监控的位点众多,且一人负责多个屏幕,需要定期监控,工作重复、繁重。为此,使用开发的智能监盘机器人能够辅助运行人员进行监盘,减少误判误操作的情况。智能监盘机器人的开发,一方面降低运行人员的劳动强度,另一方面提高了电厂集控室监盘的安全性,现有的智慧电厂用智能监盘装置在使用时还存在一定缺陷,就比如:
3.现有的智能监盘装置在使用时通常是悬吊设备运输到指定的位置,当智能监盘装置运输到指定位置再由安装人员将智能监盘装置搬起,进而对智能监盘装置的位置进行微调,不管是由悬吊设备搬运或者人工移动都是非常麻烦,且增加成本方式,智能监盘装置不方便移动。
4.所以需要针对上述问题进行改进。
技术实现要素:
5.本实用新型提供如下技术方案:本实用新型的目的在于提供一种基于智慧电厂用智能监盘装置,以解决上述背景技术提出的目前市场上的基于智慧电厂用智能监盘装置存在许多缺陷,现有的智能监盘装置在使用时通常是悬吊设备运输到指定的位置,当智能监盘装置运输到指定位置再由安装人员将智能监盘装置搬起,进而对智能监盘装置的位置进行微调,不管是由悬吊设备搬运或者人工移动都是非常麻烦,且增加成本方式,智能监盘装置不方便移动的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种基于智慧电厂用智能监盘装置,包括:主体和第一触摸控制屏;
7.所述主体上安装有第一触摸控制屏,靠近第一触摸控制屏的所述主体上安装有第二触摸控制屏,所述主体上设置有机械臂,所述机械臂端部连接有点击笔。
8.优选的,所述主体还设置有操作槽、电机、旋转杆、连接槽、螺纹杆、内螺纹矩形筒、皮带轮、皮带与滑轮;
9.所述主体内部开设有操作槽,所述操作槽内部安装有电机。
10.优选的,所述电机与操作槽之间连接有旋转杆,所述操作槽底部贯穿开设有连接槽;
11.所述操作槽顶部通过轴承连接有螺纹杆,所述螺纹杆与连接槽之间连接有内螺纹矩形筒。
12.优选的,所述螺纹杆与旋转杆侧面均连接有皮带轮,所述皮带轮之间连接有皮带,所述内螺纹矩形筒底端安装有滑轮。
13.优选的,所述机械臂还设置有安装座、转动槽、对接槽、转动块、螺栓与螺纹槽;
14.所述机械臂底端固定连接有安装座,所述安装座上开设有转动槽。
15.优选的,所述转动槽内侧贯穿开设有对接槽,所述转动槽内部活动连接有转动块,所述转动块底部固定连接有螺栓;
16.所述螺栓活动连接在对接槽的内部,所述螺栓端部螺纹连接在螺纹槽内部,所述螺纹槽开设在主体的顶部。
17.优选的,所述点击笔还设置有固定块、定位块、固定槽、连接块、第一缺口、螺纹环与第二缺口;
18.所述点击笔顶端固定连接有固定块,所述固定块侧面固定连接有定位块。
19.优选的,所述定位块活动连接在固定槽的内部,所述固定槽开设在连接块的底部,所述连接块固定连接在机械臂的端部;
20.所述固定槽内侧开设有第一缺口,所述连接块侧面螺纹连接有螺纹环,所述螺纹环表面贯穿开设有第二缺口。
21.与现有技术相比,本实用新型的有益效果是:该基于智慧电厂用智能监盘装置,当滑轮移动到地面时可以将主体撑起,主体撑起时可以通过滑轮进行移动,方便智能监盘装置在调节操作位置时可以进行移动,对接槽移动时可以与螺栓、转动块进行滑动,当对接槽滑出转动块的位置时可以对机械臂进行拆卸,方便机械臂在需要检修时可以进行快速拆卸,固定块与定位块移动时可以通过固定槽、第一缺口与第二缺口进行滑动,当定位块滑出第一缺口时可以将点击笔进行拆卸,方便点击笔接触端损坏时可以进行快速拆卸更换。
22.1.当智能监盘装置在使用时需要调节位置时,可以启动电机进行工作,电机工作时可以带动旋转杆进行转动,旋转杆转动时可以带动皮带轮进行转动,皮带轮转动时可以带动皮带进行转动,皮带转动时可以带动另一组皮带轮进行转动,另一组皮带轮转动时可以带动螺纹杆进行转动,螺纹杆转动时可以带动内螺纹矩形筒进行螺纹滑动,内螺纹矩形筒螺纹滑动时可以通过连接槽进行导向滑动,内螺纹矩形筒导向滑动时可以带动滑轮进行移动,当滑轮移动到地面时可以将主体撑起,主体撑起时可以通过滑轮进行移动,方便智能监盘装置在调节操作位置时可以进行移动;
23.2.机械臂在长时间使用时需要进行检修更换,机械臂在更换时可以对转动块进行拧动,转动块转动时可以通过转动槽进行旋转,转动块旋转时可以带动螺栓进行转动,螺栓转动时可以通过螺纹槽进行螺纹滑动,螺栓螺纹滑动时可以带动转动块进行移动,转动块移动时可以与转动槽进行松动,当转动块转动90
°
时可以与对接槽进行对接,转动块与对接槽对接后可以对安装座进行拉动,安装座受到拉动时可以带动对接槽进行移动,对接槽移动时可以与螺栓、转动块进行滑动,当对接槽滑出转动块的位置时可以对机械臂进行拆卸,方便机械臂在需要检修时可以进行快速拆卸;
24.3.设置有点击笔在长时间点击第一触摸控制屏与第二触摸控制屏时,点击笔的接触端会产生损坏,从而点击笔需要经常进行更换,转动螺纹环可以通过连接块进行螺纹滑
动,螺纹环螺纹滑动时可以与定位块进行松开,当螺纹环与定位块松开的同时,螺纹环可以带动第二缺口与定位块进行对接,此时拉动点击笔可以带动固定块与定位块进行移动,固定块与定位块移动时可以通过固定槽、第一缺口与第二缺口进行滑动,当定位块滑出第一缺口时可以将点击笔进行拆卸,方便点击笔接触端损坏时可以进行快速拆卸更换。
附图说明
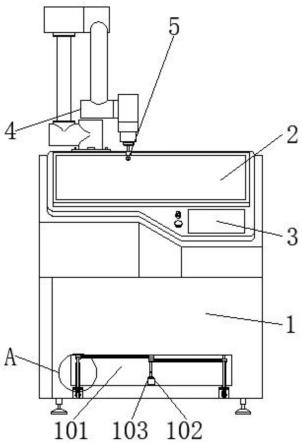
25.图1为本实用新型前视剖面结构示意图;
26.图2为本实用新型侧视结构示意图;
27.图3为本实用新型机械臂俯视剖面结构示意图;
28.图4为本实用新型点击笔俯视剖面结构示意图;
29.图5为本实用新型a部放大结构示意图;
30.图6为本实用新型b部放大结构示意图;
31.图7为本实用新型c部放大结构示意图。
32.图中:1、主体;101、操作槽;102、电机;103、旋转杆;104、连接槽; 105、螺纹杆;106、内螺纹矩形筒;107、皮带轮;108、皮带;109、滑轮; 2、第一触摸控制屏;3、第二触摸控制屏;4、机械臂;401、安装座;402、转动槽;403、对接槽;404、转动块;405、螺栓;406、螺纹槽;5、点击笔; 501、固定块;502、定位块;503、固定槽;504、连接块;505、第一缺口; 506、螺纹环;507、第二缺口。
具体实施方式
33.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
34.请参阅图1-7,本实用新型提供一种技术方案:一种基于智慧电厂用智能监盘装置,包括:主体1和第一触摸控制屏2;
35.主体1上安装有第一触摸控制屏2,靠近第一触摸控制屏2的主体1上安装有第二触摸控制屏3,主体1上设置有机械臂4,机械臂4端部连接有点击笔5。
36.主体1还设置有操作槽101、电机102、旋转杆103、连接槽104、螺纹杆105、内螺纹矩形筒106、皮带轮107、皮带108与滑轮109,主体1内部开设有操作槽101,操作槽101内部安装有电机102,当智能监盘装置在使用时需要调节位置时,可以启动电机102进行工作,电机102工作时可以带动旋转杆103进行转动。
37.电机102与操作槽101之间连接有旋转杆103,操作槽101底部贯穿开设有连接槽104,操作槽101顶部通过轴承连接有螺纹杆105,螺纹杆105与连接槽104之间连接有内螺纹矩形筒106,螺纹杆105转动时可以带动内螺纹矩形筒106进行螺纹滑动,内螺纹矩形筒106螺纹滑动时可以通过连接槽104 进行导向滑动,内螺纹矩形筒106导向滑动时可以带动滑轮109进行移动,当滑轮109移动到地面时可以将主体1撑起,主体1撑起时可以通过滑轮109 进行移动。
38.螺纹杆105与旋转杆103侧面均连接有皮带轮107,皮带轮107之间连接有皮带108,
内螺纹矩形筒106底端安装有滑轮109,旋转杆103转动时可以带动皮带轮107进行转动,皮带轮107转动时可以带动皮带108进行转动,皮带108转动时可以带动另一组皮带轮107进行转动,另一组皮带轮107转动时可以带动螺纹杆105进行转动。
39.机械臂4还设置有安装座401、转动槽402、对接槽403、转动块404、螺栓405与螺纹槽406,机械臂4底端固定连接有安装座401,安装座401上开设有转动槽402,机械臂4在长时间使用时需要进行检修更换,机械臂4在更换时可以对转动块404进行拧动,转动块404转动时可以通过转动槽402 进行旋转,转动块404旋转时可以带动螺栓405进行转动。
40.转动槽402内侧贯穿开设有对接槽403,转动槽402内部活动连接有转动块404,转动块404底部固定连接有螺栓405,螺栓405活动连接在对接槽403 的内部,螺栓405端部螺纹连接在螺纹槽406内部,螺纹槽406开设在主体1 的顶部,螺栓405转动时可以通过螺纹槽406进行螺纹滑动,螺栓405螺纹滑动时可以带动转动块404进行移动,转动块404移动时可以与转动槽402 进行松动,当转动块404转动90
°
时可以与对接槽403进行对接,转动块404 与对接槽403对接后可以对安装座401进行拉动,安装座401受到拉动时可以带动对接槽403进行移动,对接槽403移动时可以与螺栓405、转动块404 进行滑动,当对接槽403滑出转动块404的位置时可以对机械臂4进行拆卸。
41.点击笔5还设置有固定块501、定位块502、固定槽503、连接块504、第一缺口505、螺纹环506与第二缺口507,点击笔5顶端固定连接有固定块 501,固定块501侧面固定连接有定位块502,拉动点击笔5可以带动固定块 501与定位块502进行移动,固定块501与定位块502移动时可以通过固定槽 503、第一缺口505与第二缺口507进行滑动,当定位块502滑出第一缺口505 时可以将点击笔5进行拆卸。
42.定位块502活动连接在固定槽503的内部,固定槽503开设在连接块504 的底部,连接块504固定连接在机械臂4的端部,固定槽503内侧开设有第一缺口505,连接块504侧面螺纹连接有螺纹环506,螺纹环506表面贯穿开设有第二缺口507,点击笔5在长时间点击第一触摸控制屏2与第二触摸控制屏3时,点击笔5的接触端会产生损坏,从而点击笔5需要经常进行更换,转动螺纹环506可以通过连接块504进行螺纹滑动,螺纹环506螺纹滑动时可以与定位块502进行松开,当螺纹环506与定位块502松开的同时,螺纹环506可以带动第二缺口507与定位块502进行对接。
43.工作原理:在使用该基于智慧电厂用智能监盘装置时,首先该智能监盘装置采用视觉伺服技术,实现机械臂4对第一触摸控制屏2与第二触摸控制屏3的精准操作,引入图像处理技术,实现集控系统状况的快速、智能判断,使用机械臂4通过点击笔5进行触屏操作,可以实现长时间的监盘操作,减少操作人员的重复性工作,使用接触屏操作的方式,监盘人员可以方便进行直观地监督,大大提高了自动操盘的安全性,不接入总控系统进行操作,保证了电厂生产的信息安全,当智能监盘装置在使用时需要调节位置时,可以启动电机102进行工作,电机102工作时可以带动旋转杆103进行转动,旋转杆103转动时可以带动皮带轮107进行转动,皮带轮107转动时可以带动皮带108进行转动,皮带108转动时可以带动另一组皮带轮107进行转动,另一组皮带轮107转动时可以带动螺纹杆105进行转动,螺纹杆105转动时可以带动内螺纹矩形筒106进行螺纹滑动,内螺纹矩形筒106螺纹滑动时可以通过连接槽104进行导向滑动,内螺纹矩形筒106导向滑动时可以带动滑轮109进行移动,当滑轮109移动到地面时可以将主体1撑起,主体1撑起时可以通过滑轮109进行移动,智能监盘装
置在调节操作位置时可以进行移动,本说明中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
44.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。