1.本实用新型属于垃圾房技术领域,涉及一种具有智能化移动垃圾桶功能的垃圾房。
背景技术:
2.生活垃圾从被投放开始,经收集到被运至中转站或处理场的过程,是垃圾的收集过程。收集过程主要在居民区、商业区等城区范围内完成,直接影响着居民的生活环境。近年来我国逐步加大对环卫的投入,环卫基础设施和环卫装备有了较大发展,我国生活垃圾收运系统己经初具规模。为此不少城市中的小区都会配备小型垃圾房进行垃圾分类处理,垃圾房内的垃圾桶一般并排放置,为了便于垃圾筒的放置一般会在垃圾房的两侧或一侧设置一个活动门结构,当需要清理垃圾桶时,可将两边或一边开启,将桶拿出,如果分类桶过多的话,需要人工进入垃圾房将桶拿出,但由于面积有限,大部分垃圾房整体结构较小,部分人可能无法进入,同时人工进入拿出可能会弄脏衣服或身体,如不及时清理,人体会散发异味,甚至可能影响人体健康。
技术实现要素:
3.本实用新型的目的是针对现有技术中存在的上述问题,提供了一种智能化操控且减少人工进入垃圾房内移动垃圾箱并减少异物粘附在身体上的垃圾房。
4.本实用新型的目的可通过下列技术方案来实现:一种具有智能化移动垃圾桶功能的垃圾房,包括带有装配腔的房体以及设置于房体内的若干个垃圾箱,所述的房体的前端面上开设有若干个与相对应垃圾箱位置相对应的扔入口,且房体的一侧设置有活动门,其特征在于,所述的房体中的装配腔内设置有与房体相连接,且供上述相对应垃圾箱放置,并限制相对应垃圾箱位置的限位箱体,所述房体中装配腔位于活动门处的设置有与房体相连接且用于感应垃圾箱的感应单元,所述的房体中装配腔的槽顶面上设置有与房体相连接,且用于抓取垃圾箱,并控制垃圾箱轴向移动的移动单元,所述房体中的装配腔内还设置有与上述感应单元和移动单元相连接且用于控制感应单元和移动单元工作的控制箱。
5.在上述的一种具有智能化移动垃圾桶功能的垃圾房中,所述的感应单元由碰撞传感器、限位架板和感应板组成,所述的碰撞传感器设置于房体内且与其相固连,所述的感应板通过安装座与房体相连接,且感应板通过销轴与安装座相活动连接,该感应板的一端沿其轴向延伸至碰撞传感器的下方,所述的限位架板设置于上述感应板的另一端上。
6.在上述的一种具有智能化移动垃圾桶功能的垃圾房中,所述的移动单元由机械爪、伸缩气缸、装配架壳、丝杆、螺母座、驱动电机和两个装配座组成,所述的装配架壳通过若干个螺柱与房体相固连,且装配架壳上开设有供上述丝杆、螺母座和装配座安装的安装腔,两个所述装配座分别设置于装配架壳的两端部且与其相连接,所述的丝杆两端分别与相对应装配座相活动连接,该丝杆并通过联轴器与上述驱动电机相连接,所述的螺母座设置于丝杆上,所述的伸缩气缸设置螺母座上且与其相连接,所述的机械爪设置于伸缩气缸
上且与其相连接。
7.与现有技术相比,本具有智能化移动垃圾桶功能的垃圾房具有以下优点:
8.1、房体中装配腔位于活动门处的设置有与房体相连接且用于感应垃圾箱的感应单元,房体中装配腔的槽顶面上设置有与房体相连接,且用于抓取垃圾箱,并控制垃圾箱轴向移动的移动单元,房体中的装配腔内还设置有与上述感应单元和移动单元相连接且用于控制感应单元和移动单元工作的控制箱,上述结构的设置,使垃圾箱能进行智能化抓取移动放置,尽可能减少人体进入房体内,从而减少人体粘上房体内的异物。
附图说明
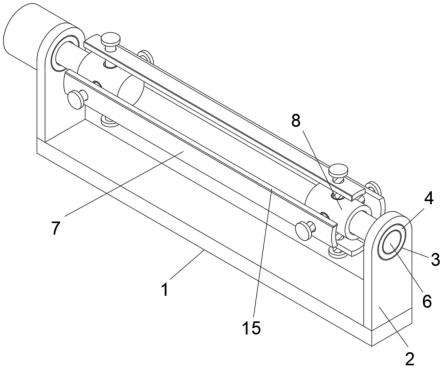
9.图1是本具有智能化移动垃圾桶功能的垃圾房中的立体结构示意图。
10.图中,1、装配腔;2、房体;3、限位箱体;4、控制箱;5、碰撞传感器;6、限位架板;7、感应板;8、安装座;9、销轴;10、机械爪;11、伸缩气缸;12、装配座。
具体实施方式
11.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
12.如图1所示,本具有智能化移动垃圾桶功能的垃圾房,包括带有装配腔1的房体2以及设置于房体2内的若干个垃圾箱,房体2的前端面上开设有若干个与相对应垃圾箱位置相对应的扔入口,且房体2的一侧设置有活动门,该活动门可为单扇门也可为双扇门,该房体2位于扔入口处均设置有与其活动链接的活动板,该活动板可通过智能化操控,房体2中的装配腔1内设置有与房体2相连接,且供上述相对应垃圾箱放置,并限制相对应垃圾箱位置的限位箱体3,房体2中装配腔1位于活动门处的设置有与房体2相连接且用于感应垃圾箱的感应单元,房体2中装配腔1的槽顶面上设置有与房体2相连接,且用于抓取垃圾箱,并控制垃圾箱轴向移动的移动单元,房体2中的装配腔1内还设置有与上述感应单元和移动单元相连接且用于控制感应单元和移动单元工作的控制箱4,该控制箱4通过plc程序控制,并通过有线或无线与终端设备相连接,房体2位于控制箱4处的周壁上开设活动门结构,便于控制箱4的装卸和维修,感应单元由碰撞传感器5、限位架板6和感应板7组成,碰撞传感器5设置于房体2内且与其相固连,所述的感应板7通过安装座8与房体2相连接,且感应板7通过销轴9与安装座8相活动连接,该感应板7的一端沿其轴向延伸至碰撞传感器5中感应点的下方且与感应点之间留有间距,限位架板6设置于上述感应板7的另一端上,限位架板6呈十字形结构设置且位于十字端均设置有挡边,房体2内可设置缓冲单元,该缓冲单元位于限位架板6的下方且与感应板7相抵触,通过该缓冲单元在垃圾箱未放时,防止感应板7与碰撞传感器5接触,当垃圾箱放入时,通过垃圾箱的重量使感应板7该端下压,从而使感应板7的另一端与碰撞传感器5接触,此时通过碰撞传感器5将数据传输至控制箱4并对其进行处理,移动单元由机械爪10、带有伸缩杆的伸缩气缸11或伸缩电机、装配架壳、丝杆、螺母座、驱动电机和两个装配座12组成,装配架壳通过若干个螺柱与房体2相固连,且装配架壳上开设有供上述丝杆、螺母座和装配座12安装的安装腔,两个所述装配座12分别设置于装配架壳的两端部且与其相连接,丝杆两端分别与相对应装配座12相活动连接,且丝杆的一端穿出其中一个装配座12外,该丝杆并通过联轴器与上述驱动电机相连接,螺母座设置于丝杆上,并通过该丝
杆控制其轴向移动,伸缩气缸11或伸缩电机设置螺母座上且与其相连接,所述的机械爪10设置于伸缩气缸11或伸缩电机的伸缩杆上且与其相连接,当感应到垃圾箱的重量时,控制箱4控制驱动电机启动,将机械爪10移动至垃圾箱处,并通过伸缩气缸11或伸缩电机控制机械爪10下行一定范围,致使机械爪10能对垃圾箱进行抓取,完成抓取后,垃圾箱随着机械爪10通过伸缩气缸11或伸缩电机上升移动到指定位置后下降,完成放置,重复上述过程直至垃圾箱放置完成,需要对垃圾箱进行拿出时,通过丝杆使垃圾箱移动至碰触传感器处,在机械爪10将其放置后,通过人工将其拿出,当然也可不放在碰撞传感器5处,可向外在移动一个位置,在放置垃圾箱,上述操作均通过控制箱4进行数据处理完成。
13.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
14.尽管本文较多地使用了装配腔1、房体2、限位箱体3、控制箱4、碰撞传感器5、限位架板6、感应板7、安装座8、销轴9、机械爪10、伸缩气缸11、装配座12等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本实用新型的本质;把它们解释成任何一种附加的限制都是与本实用新型精神相违背的。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。