具有锁定臂的系索
1.相关专利申请的交叉引用
2.本技术要求于2020年7月17日提交的美国临时申请第63/053,068号和于2020年10月15日提交的美国临时申请第63/092,057号的权益和优先权,每个临时申请都通过援引以其全部内容并入本文。
背景技术:
3.本发明总体上涉及工具领域。本发明具体涉及一种用于例如在高空作业时将工具、防护设备、工具电池、其他建筑装置/设备等连接到锚点的系索。系索用于附接和/或支撑工具、电池、部件和/或其他设备,以在操作者无意中将设备掉落时提供安全保护。系索还保护工具或设备免受坠落造成的损坏。
技术实现要素:
4.根据一个实施例,一种系索包括壳体、卷轴、长形结构(例如,系绳或绳子)、第一联接机构、第二联接机构、缩回系统以及臂。壳体包括开口。卷轴可旋转地安装在壳体内。长形结构卷绕在卷轴上,并且长形结构包括联接到卷轴的内端以及伸出开口的相反的外端。第一联接机构联接到长形结构的外端。第二联接机构联接到壳体。缩回系统联接到卷轴,并且缩回系统偏压长形结构以使其重新卷绕到卷轴上。臂联接到壳体。臂包括本体、本体的第一端、以及本体的相反的第二端。臂在锁定位置与解锁位置之间致动。在锁定位置,第一端伸出壳体而第二端不伸出壳体,并且当臂处于锁定位置时,臂与卷轴接合,以偏压卷轴使其不旋转。在解锁位置,第二端伸出壳体而第一端不伸出壳体,并且当臂处于解锁位置时,臂不偏压卷轴以使其旋转。
5.根据另一实施例,一种系索包括壳体、卷轴、长形结构、第一联接机构、第二联接机构、臂以及臂偏压系统。壳体包括开口。卷轴可旋转地安装在壳体内。长形结构卷绕在卷轴上,并且长形结构包括联接到卷轴的内端以及伸出开口的相反的外端。第一联接机构联接到长形结构的外端。第二联接机构联接到壳体。臂可滑动地联接到壳体并且臂在锁定位置与解锁位置之间致动。当臂处于锁定位置时,臂与卷轴接合,以偏压卷轴使其不旋转。臂偏压系统偏压臂以使其保持在锁定位置,并且还偏压臂以使其保持在解锁位置。
6.根据另一实施例,一种系索包括壳体、卷轴、长形结构、第一联接机构、臂以及臂锁定机构。卷轴可旋转地安装在壳体内。长形结构卷绕在卷轴上,并且长形结构包括联接到卷轴的内端以及相反的外端。卷轴沿第一方向旋转以将长形结构缩回到壳体中,而当长形结构从壳体中被拉出时,卷轴在相反的第二方向上旋转。第一联接机构联接到长形结构的外端。臂联接到壳体并且臂在锁定位置与解锁位置之间致动。当臂处于锁定位置时,臂与卷轴接合,以偏压卷轴使其不沿第二方向旋转。臂锁定机构偏压臂以使其保持在锁定位置。响应于长形结构接收到大于阈值量的力的拉力,臂从锁定位置转变到解锁位置。
7.根据一个实施例,一种系索包括:壳体,该壳体限定开口;卷轴,该卷轴可旋转地安装在壳体内;长形结构,该长形结构卷绕在线轴上,长形结构具有联接到线轴的内端和伸出
开口的外端;臂;以及缩回系统,该缩回系统联接到线轴,缩回系统驱动长形结构重新卷绕到卷轴上。臂包括第一端和相反的第二端。臂在锁定位置与解锁位置之间致动,在该锁定位置,第一端伸出壳体而第二端不伸出壳体,在该解锁位置,第二端伸出壳体而第一端不伸出壳体。突出部从臂延伸,并且当臂处于锁定位置时与线轴接合,以干扰线轴旋转,而当臂处于解锁位置时突出部不与线轴接合。
8.根据另一实施例,一种系索包括:壳体,该壳体包括开口;线轴,该线轴可旋转地安装在壳体内;长形结构,该长形结构卷绕在线轴上,长形结构具有联接到线轴的内端和伸出开口的外端;缩回系统,该缩回系统联接到线轴,其中,缩回系统驱动长形结构重新卷绕到线轴上;臂,该臂在解锁位置与锁定位置之间致动;以及臂锁定机构,该臂锁定机构偏压臂以使其相对于线轴保持静止。当臂处于锁定位置时,臂与线轴接合,从而干扰线轴旋转。当臂处于解锁位置时,臂锁定机构偏压臂以使其保持在解锁位置,而当臂处于锁定位置时,臂锁定机构偏压臂以使其保持在锁定位置。在特定实施例中,臂锁定机构包括由弹簧偏压的止动器球,以与由臂限定的凹槽接合。
9.在下面的详细描述中将阐述附加特征和优点,并且本领域技术人员从该描述中将容易了解或者通过实践如所包括的书面描述以及附图中所描述的实施例将认识到这些附加特征和优点的部分。应当理解,前述一般描述和以下详细描述都是示例性的。
10.包括附图是为了提供进一步的理解,并且附图被并入本说明书中且构成本说明书的一部分。附图展示了一个或多个实施例,并且与描述一起用于说明多个不同的实施例的原理和操作。
附图说明
11.为了更好地理解本文中所披露的主题并且举例说明可以如何在实践中实施该主题,现在将参考附图仅通过非限制性示例的方式来描述实施例,在附图中:
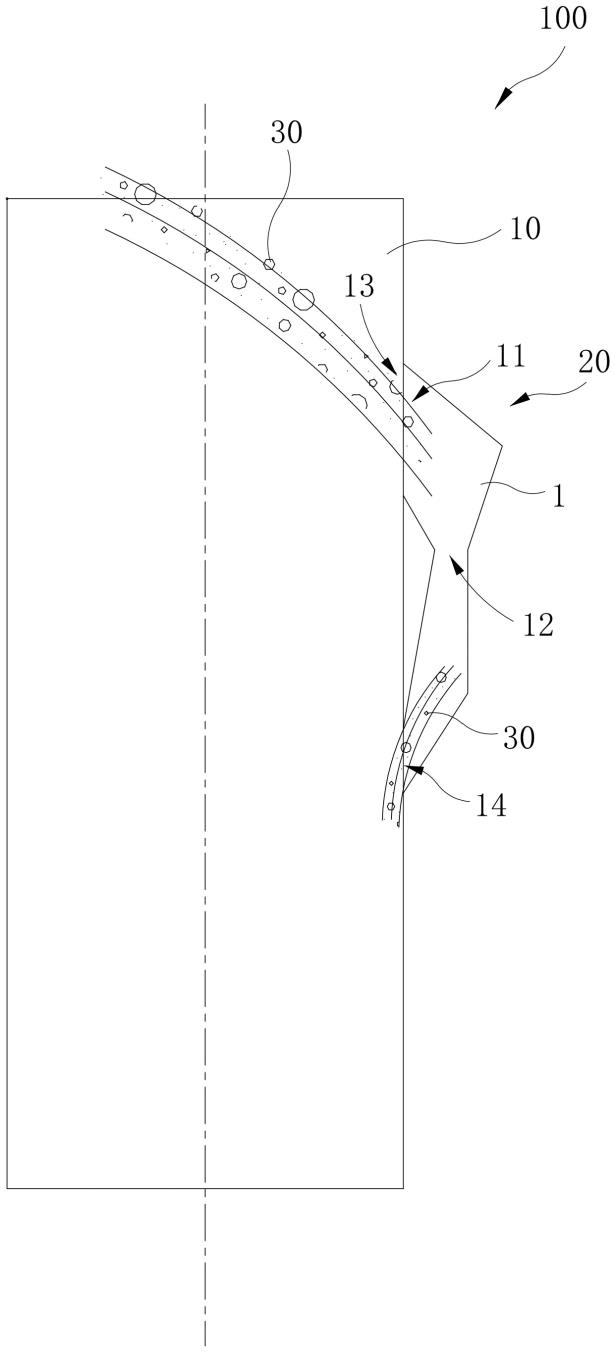
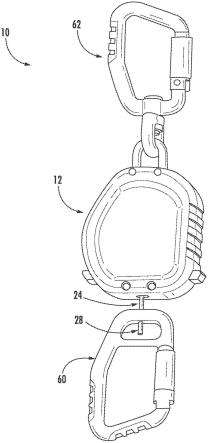
12.图1是根据实施例的系索的立体图。
13.图2是根据示例性实施例的图1的系索的侧视图。
14.图3是根据示例性实施例的图1的系索沿着图2的线3-3截取的截面视图。
15.图4是根据示例性实施例的图1的系索沿着图2的线3-3截取的另一截面视图,其中臂处于与图3不同的位置。
16.图5是根据另一实施例的系索的侧视图。
17.图6是根据示例性实施例的图5的系索的截面视图。
18.图7是根据另一实施例的系索的侧视图。
具体实施方式
19.总体上参考附图,示出了系索的多个不同的实施例。例如,在高空作业时,系索被用作将工具/设备固定到锚点的安全措施。为了提高安全性,系索可以联接到工具、防护设备、工具电池、其他建筑装置/设备等并在高空操作工具时栓住它们。当操作者在高处使用工具时,各种规定(例如osha规定)可能需要系索。当工具在高处掉落时,系索将工具联接到锚点,并防止工具掉落超过由系索提供的距离。这防止了安全隐患,也保护了工具免受可能由坠落而引起的其他损坏。
20.申请人已经开发了一种创新的锁定/偏压机构,该机构限制系索线轴的运动。当锁定机构处于锁定位置时,系索线轴被偏压使其不旋转,除非有足够的拉力施加在绳索上,在这种情况下锁定机构与系索线轴脱离接合。这种脱离接合功能允许系索绳索伸展,而不需要使用者直接与锁定机构接触并致动锁定机构。当锁定机构处于解锁位置时,系索线轴被允许旋转而不受锁定机构的干扰。锁定机构包括锁定部件,这些锁定部件偏压锁定机构以使其在处于锁定位置和解锁位置时保持静止。
21.参照图1至图4,示出了装置的多个不同的方面,该装置被示出为系索10。系索10包括联接到壳体12的可缩回的第一联接机构(示出为竖钩60)和固定的第二联接机构(示出为竖钩62)。竖钩60和竖钩62都联接到壳体12。壳体12包括开口14。示出为绳索24的长形柔性结构具有联接到线轴20的内端26和伸出开口14的相反的外端28。竖钩60联接到绳索24的外端28。绳索24可从壳体12伸出和缩回,从而减少和增加竖钩60与壳体12可以分开的距离。竖钩62联接到壳体12,使得竖钩62和壳体12彼此保持相对固定的距离。
22.在使用中,竖钩60联接到比如工具、防护设备、工具电池、其他建筑装置/设备等物品。竖钩62将系索10锚固到锚点,比如皮带、脚手架等。如果并且当联接到竖钩60的物品掉落时,系索10将物品锚固到竖钩62所联接的锚点。
23.线轴20可旋转地联接到壳体12(例如,可旋转地安装在壳体12内),使得线轴20相对于壳体12绕轴线8旋转。在特定实施例中,线轴20是卷轴。示出为绳索24的长形结构卷绕在线轴20上。当绳索24通过开口14从壳体12中抽出时,线轴20沿第二旋转方向(示出为方向48)绕轴线8旋转。当绳索24将绳索24收回到壳体12内并卷绕到线轴20上时,线轴20沿第一方向(与方向48相反)旋转。缩回系统30沿与旋转方向48相反的方向偏压线轴20,从而偏压绳索24以使其在壳体12内缩回到线轴20上。在特定实施例中,缩回系统30包括弹簧,比如螺旋弹簧。在特定实施例中,缩回系统30联接到线轴20,并且缩回系统30偏压绳索24以使其重新卷绕到线轴20上。在特定实施例中,当臂32处于锁定位置时,臂32与线轴20接合,从而偏压线轴20以使其不旋转(比如沿与旋转方向48相反的方向旋转)。在特定实施例中,臂32是相对于壳体12线性滑动的梭子。
24.在另一实施例中,系索的构造被翻转,因此处于相反的布置。例如,当绳索24从壳体12中抽出时,线轴20沿与旋转方向48相反的方向绕轴线8旋转,臂的齿38位于臂32的右侧,并且当臂32伸出壳体的左侧(从图3的角度来看)时,臂32处于锁定位置。
25.臂32沿着线性轴线40致动,使得当臂32处于锁定位置时(图3最佳示出),臂32的突出部(示出为齿38)与线轴20的齿22接合。当齿38和齿22接合时,臂32阻止线轴20沿方向48或与方向48相反的方向旋转。换句话说,当臂32处于锁定位置时,臂32与线轴20接合,以偏压线轴20使其不旋转。当臂32处于解锁位置时(图4最佳示出),臂32的齿38不与线轴20的齿22接合,因此臂32不再阻止线轴20旋转。在特定实施例中,臂32可滑动地联接到壳体12,使得臂32经由臂32相对于壳体12滑动而在锁定位置与解锁位置之间致动。在特定实施例中,臂32包括本体33、本体33的第一端34、以及本体33的相反的第二端36,该第二端与第一端34相反。
26.示出为弹簧偏压球56的第一偏压部件和也示出为弹簧偏压球58的第二偏压部件选择性地阻止臂32在锁定位置(图3)与解锁位置(图4)之间致动。当臂32处于锁定位置时(图3),弹簧偏压球56与凹槽50接合并且弹簧偏压球58与凹槽64接合,从而偏压臂32以使其
保持在锁定位置。
27.为了将臂32从锁定位置致动到解锁位置,使用者可以在臂32的第二端36上施加足以克服弹簧偏压球56和弹簧偏压球58的偏压力的力。当足够的力被施加在臂32的第二端36上时,臂32从锁定位置(图3)移动到解锁位置(图4),直到臂32的第一端34从壳体12的开口16伸出而臂32的第二端36不再从壳体12的开口18伸出。当臂32处于解锁位置时(图4),弹簧偏压球56与凹槽52接合并且弹簧偏压球58与凹槽66接合,从而偏压臂32以使其保持在解锁位置。
28.在特定实施例中,当臂32处于锁定位置时,臂32的第一端34伸出壳体12而第二端36不伸出壳体12,并且当臂32处于锁定位置时,臂32与线轴20接合,以偏压线轴20使其不旋转。在特定实施例中,当臂32处于解锁位置时,第二端36伸出壳体12而第一端34不伸出壳体12,并且当臂32处于解锁位置时,臂32不偏压线轴20以使其旋转。
29.在特定实施例中,响应于绳索24接收到大于阈值量的力(例如,足以克服臂偏压系统54的偏压力的量的力)的拉力(例如,方向70上的力;见图4),臂32从锁定位置转换到解锁位置。例如,当绳索24接收到阈值量的力时,线轴20的齿22与齿38接合,以将臂32推到解锁位置(例如,如图3和图4所示向左)。
30.在另一实施例中,当臂32处于锁定位置时,臂32从壳体12的两端伸出,当臂32处于解锁位置时,臂32从壳体12的两端伸出。
31.替代性地,在绳索24上施加足够的力将臂32从锁定位置致动到解锁位置。当拉力相对于壳体12施加在绳索24上时,绳索24在线轴20上沿方向48施加对应的旋转力。当足够的力施加在线轴20上时,线轴20的齿22将臂32的齿38沿着线性轴线40推向左侧(从图3的角度看)。因此,如果足够的拉力被施加在绳索24上,臂32将从锁定位置(图3)被致动。
32.在特定实施例中,臂偏压系统54包括第一臂偏压机构53和第二臂偏压机构55。臂偏压系统54偏压臂32以使其保持在锁定位置,以及臂偏压系统54偏压臂32以使其保持在解锁位置。第一臂偏压机构53包括第一弹簧偏压球56和示出为弹簧72的第一偏压元件,该第一偏压元件将第一弹簧偏压球56偏压抵靠在臂32上。第二臂偏压机构55包括第二弹簧偏压球58和示出为弹簧74的第二偏压元件,该第二偏压元件将第二弹簧偏压球58偏压抵靠在臂32上。
33.在特定实施例中,第一臂偏压机构53和第二臂偏压机构55中的每一个都包括与弹簧偏压球56、58中的一个接合的止动器。在各种实施例中,第一臂偏压机构53偏压臂32以使其保持在锁定位置,第二臂偏压机构55偏压臂32以使其保持在解锁位置。在特定实施例中,除了偏压臂32以使其保持在锁定位置之外,第一臂偏压机构53还偏压臂32以使其保持在解锁位置。在特定实施例中,除了偏压臂32以使其保持在解锁位置之外,第二臂偏压机构55还偏压臂32以使其保持在锁定位置。
34.在替代性实施例中,臂偏压系统54仅包括第一臂偏压机构53和第二臂偏压机构55中的一个(例如,仅一个弹簧偏压球56和仅一个弹簧偏压球58)。
35.在特定实施例中,臂32包括硬止挡件,示出为下部突出部42,该下部突出部限制臂32的滑动运动范围。臂32的下部突出部42与壳体12的左壁44和右壁46接合,以将臂32限制在锁定位置(图3)与解锁位置(图4)之间的位置。在另一实施例中,臂32不包括接合壳体12的左壁44和右壁46的下部突出部42。
36.参照图5和图6,示出了根据示例性实施例的系索110。除了所描述的差异之外,系索110类似于系索10。
37.系索110包括示出为弹簧偏压球156的第一锁定部件和示出为弹簧偏压球158的第二锁定部件。弹簧偏压球156和158操作以选择性地阻止臂132沿着轴线140的运动。臂132沿着轴线140相对于壳体112在锁定位置(图5)与解锁位置之间致动,并且在用户选择位置之后,弹簧偏压球156和158将臂132保持在锁定位置或解锁位置。
38.当臂132处于锁定位置时(图5),弹簧偏压球156与凹槽150接合并且弹簧偏压球158与凹槽164接合。并且在该位置,弹簧偏压球156和158与凹槽150和164的接合用于将臂132保持在锁定位置。当臂132处于解锁位置时,弹簧偏压球156与凹槽152接合并且弹簧偏压球158与凹槽166接合。在该位置,弹簧偏压球156和158与凹槽152和166的接合用于将臂132保持在解锁位置。
39.为了将臂132从锁定位置致动到解锁位置,使用者可以在臂132的第二端136上施加足以克服弹簧偏压球156和弹簧偏压球158的偏压力的力。当足够的力施加在臂32的第二端136上时,臂132从锁定位置(图5)移动到解锁位置,直到臂132的第一端134从壳体112伸出而臂132的第二端136不再从壳体112伸出。
40.替代性地,在绳索124上施加足够的力将臂132从锁定位置致动到解锁位置。当拉力相对于壳体112施加在绳索124上时,绳索124在线轴120上施加对应的旋转力。当足够的力施加在线轴120上时,线轴120的齿122将臂132的齿138沿着线性轴线140推向左侧(从图6的角度看)。因此,如果足够的拉力被施加在绳索124上,臂132将从锁定位置(图6)被致动。
41.参照图7,根据示例性实施例示出了系索210。除了所描述的差异之外,系索210类似于系索10或系索110。
42.系索210包括经由柔性联接件280联接到壳体212的固定的联接单元262。在特定实施例中,柔性联接件280由织物材料形成。申请人已经观察到,比如当柔性联接件280由织物材料形成时,柔性联接件280在掉落事件期间(例如,当联接到可缩回的联接单元260的物体掉落时)吸收一些冲击载荷,从而降低系索210内的部件上的载荷,并且对应地降低系索210内的部件断裂和/或损坏的可能性。
43.应当理解,附图详细地展示了示例性实施例,并且应当理解,本技术不限于在说明书中阐述的或在附图中展示的细节或方法。还应当理解,术语仅出于说明的目的,而不应被视为是限制性的。
44.鉴于本说明书,本披露内容的多个不同的方面的进一步的修改和替代性实施例对于本领域技术人员来说将是显而易见的。因此,此描述被解释为仅是说明性的。在多个不同的示例性实施例中示出的构造和布置仅是说明性的。虽然在本披露内容中仅详细描述了几个实施例,但是在实质上不脱离本文描述的主题的新颖教导和优点的情况下,许多修改是可能的(例如,多个不同的元件的大小、尺寸、结构、形状和比例、参数值、安装布置、材料的使用、颜色、取向等的变化)。被示出为一体形成的一些元件可以由多个部分或元件构成,元件的位置可以颠倒或以其他方式改变,并且离散元件的性质或数量或位置可以变化或改变。根据替代性实施例,任何过程、逻辑算法或方法步骤的次序或顺序都可以改变或重新排序。在不脱离本披露内容的范围的情况下,还可以在多个不同的示例性实施例的设计、操作条件和布置方面进行其他替换、修改、改变和省略。
45.除非另外明确陈述,否则本文阐述的任何方法决不意图被解释为要求其步骤按指定的次序执行。相应地,在方法权利要求实际上没有列举其步骤应遵循的次序的情况下或在权利要求或说明书中没有特别声明步骤应限于特定次序的情况下,决不意图推断出任何特定次序。另外,本文使用的冠词“一”旨在包括一个或多个部件或元件,并且不旨在被解释为仅有一个。如本文使用的,“刚性联接”是指两个部件以使得这些部件在受到力作用时以固定的位置关系一起移动的方式进行联接。
46.本披露内容的多个不同的实施例涉及任何特征的任何组合,并且在本技术或将来的申请中可以要求保护特征的任何这种组合。上面讨论的任何示例性实施例的任何特征、元件或部件都可以单独使用,或者与上面讨论的任何其他实施例的任何特征、元件或部件组合使用。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。