1.本技术涉及全息光学元件技术领域,特别是涉及眼动追踪系统以及头戴式电子设备。
背景技术:
2.智能电子产品行业普遍预测ar(增强现实(augmented reality,简称ar))眼镜未来将取代手机等电子终端,在ar行业中,对眼动进行追踪非常重要。
3.眼动追踪需要获取眼球的运动信息,目前行业内的眼动追踪主流方案基于图像算法,利用红外灯珠和摄像头观察眼球运动。但是现有技术中存在照明灯珠、摄像头位置与人眼视觉冲突的问题,导致出现灯珠照明不全、摄像头角度偏斜等现象发生。
技术实现要素:
4.本技术主要解决的技术问题是提供一种眼动追踪系统以及头戴式电子设备,能够获取眼球的正视视角进行眼动追踪。
5.为解决上述技术问题,本技术采用的一个技术方案是:提供一种眼动追踪系统,包括:
6.光源,用于向眼球出射光线;
7.第一全息光学元件,与所述眼球相对设置,用于接收所述眼球反射的光线,所述眼球反射的光线进入所述第一全息光学元件后衍射出第一衍射光线;
8.第二全息光学元件,沿所述第一衍射光线的光路设置,接收所述第一衍射光线并衍射出第二衍射光线;
9.图像传感器,沿所述第二衍射光线的光路设置,接收所述第二衍射光线。
10.为解决上述技术问题,本技术采用的另一个技术方案是:提供一种头戴式电子设备,包括本技术提供的眼动追踪系统。
11.本技术的有益效果是:区别于现有技术的情况,本技术的眼动追踪系统包括光源、第一全息光学元件、第二全息光学元件和图像传感器。其中光源用于向眼球出射光线,光线照射至眼球后被眼球反射至第一全息光学元件上。眼球反射的光线进入第一全息光学元件后发生衍射,光线角度发生改变,得到第一衍射光线。第一衍射光线入射至第二全息光学元件,进入第二全息光学元件后发生衍射,再次改变角度后转换为第二衍射光线,第二衍射光线入射进入图像传感器中,图像传感器获取眼球的图像信息,基于其中的光斑确定眼球角膜和瞳孔的位置关系,以对眼球的运动进行追踪。因此,本技术可以通过第一全息光学元件和第二全息光学元件对眼球反射的光线的角度进行矫正,获取眼球的正视图像。
附图说明
12.图1是本技术眼动追踪系统一实施例的结构示意图
13.图2是本技术眼动追踪系统另一实施例的结构示意图;
14.图3是本技术眼动追踪系统又一实施例的结构示意图;
15.图4是本技术头戴式电子设备一实施例的结构示意图;
16.图5是图4实施例头戴式电子设备的具体结构示意图。
具体实施方式
17.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
18.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
19.需要说明的是,本技术实施例中的术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“第三”的特征可以明示或者隐含地包括至少一个该特征。本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
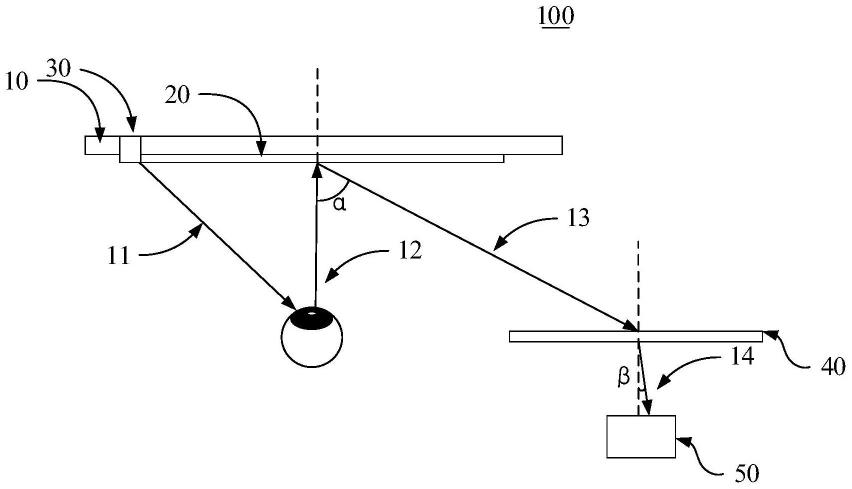
20.请参阅图1,图1是本技术眼动追踪系统一实施例的结构示意图。
21.具体而言,眼动追踪系统100可以包括第一全息光学元件20、光源30、第二全息光学元件40以及图像传感器50。
22.光源30设置在眼球的一侧,用于对眼球出射光线11,其中光线11可以是可见光、红外光或其他频率的光,本领域技术人员可以依据实际情况设置。
23.可选地,光源30可以是一个或多个发光二极管(led)。
24.图像传感器50用于接收眼球反射的图像信息,从而确定眼球的视线指向哪里。而为了确定佩戴者的视线指向哪里,需要得到佩戴者的眼球正视图像。如果直接将图像传感器50正对眼球设置会遮挡视线,将图像传感器50斜对眼球设置又有可能会被睫毛、镜框等物体遮挡,且加重计算负担。因而本技术通过第一全息光学元件20和第二全息光学元件40改变光线的光路,达到既可以获得眼球正视图像,又可以保证达到眼球视线不被遮挡的效果。
25.第一全息光学元件20与眼球相对设置,光源30向眼球出射的光线11被眼球反射,第一全息光学元件20设置在眼球反射的光线12的光路上。
26.第一全息光学元件20可以是根据全息术原理制成的全息光学元件(holographic optical elements),第一全息光学元件20可以是聚合物或者是聚合物和液晶材料的混合物,也可以是设置在显示装置10一侧表面的薄膜。
27.可选地,第一全息光学元件20可以是全息透镜、全息光栅等全息光学元件。
28.眼球反射的光线12被第一全息光学元件20接收后发生衍射,改变原来的传播方向。
29.眼球反射的光线12经第一全息光学元件20衍射后,转换为第一衍射光线13,第一衍射光线13与眼球反射的光线12的传播方向不同。
30.在本实施例中,第一全息光学元件20是反射全息光学元件,第一全息光学元件20对于眼球反射的光线12是反射性的。因此,眼球反射的光线12入射到第一全息光学元件20后改变了原始的传播方向,衍射出的第一衍射光线13呈反射性质。
31.可选地,反射全息光学元件可以被透射性全息光学元件加反射镜替代,即第一全息光学元件20可以是透射性全息光学元件和反射镜的组合。眼球反射的光线12首先进入透射性全息光学元件后产生衍射,得到第一衍射光线13,第一衍射光线13透过透射性全息光学元件后与原始的传播方向不同,并遇到反射镜后反射,往第一全息光学元件20靠近眼球的反向出射反射光线,同样达到反射全息光学元件的效果。
32.可选地,眼球反射的光线12与第一全息光学元件20的法线夹角为0
°
~5
°
,例如可以是0
°
、1
°
、2
°
、3
°
、4
°
、5
°
。即眼球反射的光线12垂直或者基本垂直入射于第一全息光学元件20中,如此能够获得眼球的正视视角的图像,防止斜视视角时眼球被其他物体遮挡。改变眼球反射的光线12与第一全息光学元件20的法线的夹角可以通过设置光源30的位置来实现。
33.可选地,眼球反射的光线12与第一衍射光线13之间的夹角α为20
°
~80
°
,例如可以是20
°
、30
°
、40
°
、50
°
、60
°
、70
°
、80
°
。而改变眼球反射的光线12与第一衍射光线13之间的夹角α的大小可以通过改变第一全息光学元件20内部结构,例如内部光栅的结构而实现。
34.由上述可知,眼球反射的光线12基本与第一全息光学元件20的法线平行,第一衍射光线13将朝着第一全息光学元件20靠近眼球一侧,并与第一全息光学元件20的法线夹角20
°
~80
°
左右的角度出射。
35.假设在第一衍射光线13的光路方向上设置图像传感器50,可以获得眼球的正视图像。
36.而在本实施例中,为了更方便地设置图像传感器50的位置,还通过设置第二全息光学元件40来改变第一衍射光线13的传播路径。
37.具体地,第二全息光学元件40设置在第一衍射光线13的传播方向上,位于第一全息光学元件20靠近眼球的一侧。
38.第二全息光学元件40与第一全息光学元件20类似,都是根据全息术原理制成的全息光学元件(hoe)。
39.第二全息光学元件40也能对光线进行衍射,改变入射原始光线的传播方向。
40.第二全息光学元件40接收第一衍射光线13,并衍射出第二衍射光线14。
41.在本实施例中,第二全息光学元件40是透射全息光学元件,第二衍射光线14朝第二全息光学元件40远离第一全息光学元件20的一侧出射。
42.图像传感器50沿第二衍射光线14的光路设置,设置在第二全息光学元件40远离第一全息光学元件20的一侧,用于接收第二衍射光线14,获取眼球的正视图像,以确定眼球的注视矢量。
43.可选地,图像传感器50可以是光电传感器、光电二极管、电荷耦合器件(ccd)或其他图像传感器。
44.可选地,第二衍射光线14与第二全息光学元件40的法线夹角β的大小为0
°
、10
°
、20
°
、30
°
、40
°
、50
°
、60
°
、70
°
、80
°
。而改变第二衍射光线14与第二全息光学元件40的法线夹角β的大小可以通过改变第二全息光学元件40内部结构,例如内部光栅的结构而实现。
45.通过改变第二衍射光线14与第二全息光学元件40的法线夹角β大小可以改变图像传感器50的位置,也可以基于图像传感器50的实际位置设计夹角β的大小,使得图像传感器50能够获得最佳的眼球正视图像。
46.在夹角β为0
°
时,第二衍射光线14与第二全息光学元件40的法线重合。本实施例中第一全息光学元件20的法线与第二全息光学元件40的法线相互平行,那么第二衍射光线14相对于眼球反射的光线12的传播方向而言,经过平移且方向相反,因此可以无需在眼球的正方向上设置图像传感器50,也能够获得眼球的正视图像。
47.可选地,在其他的一些实施例中,眼动追踪系统还可以包括更多的全息光学元件,利用更多的全息光学元件来改变眼球反射的光线12的传播位置,使眼球反射的光线12通过多个全息光学元件的作用下被图像传感器50接收,在此不作限定。图像传感器50基于接收图像中的光斑确定眼球角膜和瞳孔的位置关系,以对眼球的运动进行追踪。
48.在本实施例中,通过第一全息光学元件20和第二全息光学元件40对眼球反射的光线12进行两次衍射,将眼球反射的光线12的传播方向进行修改,使得眼球的正视图像能够顺利到达图像传感器50中,实现了无遮挡眼动追踪,解决了眼球图像被镜框、睫毛等物体遮挡的问题,且图像处理更为简单。
49.进一步地,当本技术的眼动追踪系统100应用于头戴式电子设备时,眼动追踪系统100还包括显示装置10。
50.其中,显示装置10可用于显示图像数据,将图像投影至眼球。其中,显示装置10具体可以为头戴式电子设备中的智能镜片模组结构,可以包括若干镜片以及显示膜层(图中未示),可用于显示3d图像或者虚拟现实增强图像。
51.可选地,显示装置10可以设置在光源30的一侧,眼球可以同时接收显示装置10出射的图像光线和光源30出射的光线11。在这种情况下,光源30出射的光线11是红外光线。由于人体肉眼观察不到红外光线,因此光源30不会对显示装置10的图像产生影响。
52.第一全息光学元件20的特性随光的波长而发生改变。在本实施例中,第一全息光学元件20能够作用于红外光线而透射可见光,因此眼球可以透过第一全息光学元件20观察到显示装置10中的图像。
53.眼球反射的光线12经第一全息光学元件20衍射后,转换为第一衍射光线13,第一衍射光线13与眼球反射的光线12的传播方向不同,其中眼球反射的光线12可以包括眼球反射光源30的红外光线、眼球反射显示装置10图像数据的光线等。
54.眼球反射的光线12其中的红外光线入射到第一全息光学元件20后改变了原始的传播方向,衍射出的第一衍射光线13呈反射性质,第一衍射光线13是红外光线。
55.第二全息光学元件40在第一衍射光线13的传播方向上,位于第一全息光学元件20靠近眼球的一侧。第二全息光学元件40接收第一衍射光线13,并衍射出为红外光线的第二衍射光线14。
56.因此,本实施例下提供的眼动追踪系统100可以应用于头戴式电子设备,利用红外光线,在不干扰头戴式电子设备产生的显示图像的情况下,同时对眼球的注视方向进行追踪。
57.请参阅图2,图2是本技术眼动追踪系统另一实施例的结构示意图。在此实施例中,眼动追踪系统100可以包括显示装置10、第一全息光学元件20、光源30、第二全息光学元件
40以及图像传感器50。
58.此实施例相对于上一实施例,第一全息光学元件20的法线与第二全息光学元件40的法线之间存在夹角。
59.可选地,第一全息光学元件20的法线与第二全息光学元件40的法线之间的夹角大小为0
°
~120
°
,例如可以是0
°
、20
°
、40
°
、60
°
、80
°
、100
°
、120
°
。
60.改变第一全息光学元件20的法线与第二全息光学元件40的法线之间的夹角可以通过转动第二全息光学元件40来实现。第一全息光学元件20的法线与第二全息光学元件40法线之间的夹角发生改变后,第二全息光学元件40衍射出的第二衍射光线14的传播方向也会发生改变,因此,通过改变第一全息光学元件20的法线与第二全息光学元件40的法线之间的夹角可以使得第二衍射光线14正确入射进入图像传感器50中。
61.在该实施例中,通过转动第二全息光学元件40,使得第二衍射光线14的传播方向发生改变,以使第二衍射光线14能够入射进任意位置的图像传感器50中,被图像传感器50中所接收。故该实施例下的图像传感器50的位置设置灵活,可以适应不同尺寸大小的头戴式电子设备。
62.请参阅图3,图3是本技术眼动追踪系统另一实施例的结构示意图。在此实施例中,眼动追踪系统100可以包括显示装置10、第一全息光学元件20、光源30、第二全息光学元件40以及图像传感器50。
63.在此实施例中,第一全息光学元件20和第二全息光学元件40都是反射全息光学元件,第一全息光学元件20和第二全息光学元件40对红外光线呈反射特性。
64.眼球反射的光线12被第一全息光学元件20接收后发生衍射,形成第一衍射光线13,第一衍射光线13与眼球反射的光线12的传播方向不同。
65.可选地,眼球反射的光线12与第一衍射光线13之间的夹角α为20
°
~80
°
,例如可以是20
°
、30
°
、40
°
、50
°
、60
°
、70
°
、80
°
。而改变光线11与第一衍射光线13之间的夹角α的大小可以通过改变第一全息光学元件20内部结构,例如内部光栅的结构而实现。
66.第二全息光学元件40设置在第一衍射光线13的传播方向上,位于第一全息光学元件20靠近眼球的一侧。
67.第二全息光学元件40接收第一衍射光线13,并衍射出第二衍射光线14。
68.可选地,第二衍射光线14与第二全息光学元件40的法线夹角β的大小为0
°
、10
°
、20
°
、30
°
、40
°
、50
°
、60
°
、70
°
、80
°
。而改变第二衍射光线14与第二全息光学元件40的法线夹角β的大小可以通过改变第二全息光学元件40内部结构,例如内部光栅的结构而实现。
69.在此实施例中,由于第二全息光学元件40是反射全息光学元件,图像传感器50沿第二衍射光线14的光路设置在第二全息光学元件40靠近第一全息光学元件20的一侧。
70.因而在此实施例中,通过利用两个反射全息光学元件,也可以将眼球反射的光线12的传播方向进行修改,使得眼球的正视图像能够顺利到达图像传感器50中,实现了无遮挡眼动追踪,解决了眼球图像被镜框、睫毛等物体遮挡的问题,且图像处理更为简单。
71.请一并参阅图4和图5,图4是本技术头戴式电子设备一实施例的结构示意图,图5是图4实施例头戴式电子设备的具体结构示意图。在本实施例中,头戴式电子设备1000包括眼动追踪系统100。眼动追踪系统100是本技术提供的眼动追踪系统,具体可以参考以上实施例的描述。
72.作为本实施例中使用的“头戴式电子设备”包括但不限于被设置成经由有线线路连接(如经由公共交换电话网络(pstn)、数字用户线路(dsl)、数字电缆、直接电缆连接,以及/或另一数据连接/网络)和/或经由(例如,针对蜂窝网络、无线局域网(wlan)、诸如dvb-h网络的数字电视网络、卫星网络、am-fm广播发送器,以及/或另一通信终端的)无线接口接收/发送通信信号的装置。被设置成通过无线接口通信的通信终端可以被称为“无线通信终端”、“无线终端”或“移动终端”。移动终端的示例包括,但不限于卫星或蜂窝电话;可以组合蜂窝无线电电话与数据处理、传真以及数据通信能力的个人通信系统(pcs)终端;可以包括无线电电话、寻呼机、因特网/内联网接入、web浏览器、记事簿、日历以及/或全球定位系统(gps)接收器的pda;以及常规膝上型和/或掌上型接收器或包括无线电电话收发器的其它电子设备。智能眼镜即为配置有蜂窝通信模块的头戴式电子设备。
73.在本技术头戴式电子设备1000的使用过程中,佩戴者的眼睛总是在运动,此时就需要知道佩戴者的眼睛在看哪里。因此,眼动追踪系统100用于在佩戴者的眼睛移动时,确定佩戴者的视线指向哪里。
74.在现有的头戴式电子设备中,由于各种因素导致眼镜中的位置存在物理限制,使得眼动追踪可能很困难。并且头戴式电子设备越紧凑,显示和眼动追踪眼动元件的放置位置就越有限。而眼动追踪系统100能够解决上述问题,使头戴式电子设备1000可以精准获得佩戴者的正视眼动信息,并且还可以利用红外光线,在不干扰头戴式电子设备产生的显示图像的情况下,同时对眼球的视线进行追踪。
75.需要说明的是,本技术中的头戴式电子设备可以包括智能眼镜、虚拟现实智能眼镜等。
76.需要说明的是,本技术实施例中的术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或组件。
77.以上所述仅为本技术的实施例,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本技术的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。