无线充电车辆及其无线充电方法
1.相关申请的交叉引用
2.本技术要求于2021年8月3日提交的申请号为10-2021-0101799的韩国专利申请的权益,该韩国专利申请在此通过引用并入本文。
技术领域
3.本发明实施例涉及一种无线充电车辆及其无线充电方法。
背景技术:
4.电动车辆充电系统是基本上利用来自电网或储能装置的电力对安装在电动车辆上的电池充电的系统。电动车辆充电系统可以根据电动车辆的类型而具有各种形式。例如,电动车辆充电系统可以包括使用电缆的传导充电系统或非接触式无线充电系统。通常,无线充电系统的无线充电表示一种通过电磁感应以使电流流动来为电池充电的方法,其中在充电器的初级线圈中流动的电流所产生的磁场对电池的次级线圈产生感应电流,并且感应电流为电池充电。
5.在考虑为自动驾驶车辆或电动车辆充电的便利性时,无线充电系统是必不可少的充电技术之一,为了达到最佳的充电效率,用于传输电力的无线充电器的初级充电板(primary charging pad)和用于接收电力的车辆的次级充电板(secondary charging pad)之间的精确对准是必不可少的。
6.本背景技术部分公开的上述内容仅用于增强对本发明背景技术的理解,因此可以包含不构成本领域普通技术人员已知的现有技术的信息。
技术实现要素:
7.本发明的实施例涉及一种无线充电车辆及其无线充电方法。特定实施例涉及用于执行车辆和无线充电器之间的位置对准的无线充电车辆及其无线充电方法。
8.本发明的实施例提供一种使无线充电器的初级充电板和车辆的次级充电板之间能够准确对准的无线充电车辆及其无线充电方法。
9.本发明的实施例提供一种无线充电车辆,其包括:次级充电板,通过无线充电站的初级充电板产生的磁场产生感应电流,并对电池充电;多个超宽带(uwb)标签,被设置为围绕车辆;以及uwb控制器,通过利用uwb标签测量的传感器值来执行用于将次级充电板对准在初级充电板上的无线充电对准模式,其中uwb控制器通过利用uwb标签中具有视线的uwb标签的视线(los)传感器值来计算初级充电板的坐标。
10.uwb控制器可以比较各个uwb标签的uwb信号并确定初级充电板所在的位置象限,并且可以基于位置象限,区分具有视线的uwb标签和不具有视线的uwb标签。
11.uwb控制器可以组合根据车辆的移动的里程计信息和los传感器值来更新车辆位置。
12.uwb控制器可以通过利用扩展卡尔曼滤波器和粒子滤波器方案来更新车辆位置。
13.本发明的另一实施例提供一种无线充电车辆的无线充电方法,该方法包括:比较由多个uwb标签接收的uwb信号,并确定uwb锚点所在的位置象限;基于位置象限,通过利用具有视线的uwb标签的los传感器值来计算uwb锚点的坐标;以及基于uwb锚点的坐标,向uwb锚点移动。
14.无线充电方法可以进一步包括组合根据车辆的移动的里程计信息和los传感器值来更新车辆位置。
15.可以通过利用扩展卡尔曼滤波器和粒子滤波器方案来更新车辆位置。
16.可以通过利用应用于车辆的uwb传感器从远处找到无线充电器的初级充电板的位置,并可以执行无线充电器的初级充电板和车辆的次级充电板之间的准确对准。
附图说明
17.图1示出根据本发明实施例的无线充电车辆。
18.图2示出根据本发明实施例的无线充电站。
19.图3是示出根据本发明实施例的无线充电车辆的无线充电方法的流程图。
20.图4示出根据本发明实施例的用于确定uwb锚点的位置象限的象限。
21.图5示出根据本发明实施例的uwb锚点坐标的计算方法。
22.图6示出根据本发明实施例的根据车辆的移动更新车辆位置的方法。
23.图7是示出根据本发明另一实施例的无线充电车辆的无线充电方法的流程图。
具体实施方式
24.下面将参照示出本发明实施例的附图更全面地描述本发明的实施例。本领域技术人员将意识到,所描述的实施例可以以各种不同的方式进行修改,所有这些修改都不背离本发明的思想或范围。
25.附图和描述在本质上被认为是说明性的而非限制性的,并且在整个说明书中相同的附图标记表示相同的元件。
26.除非明确地有相反的描述,否则词语“包括”和诸如“包括有”或“包含”的变体将被理解为暗示包括所述元件但不排除任何其它元件。
27.现在将参照图1描述无线充电车辆,参照图2描述无线充电站,并且参照图3至图7描述无线充电车辆的无线充电方法。
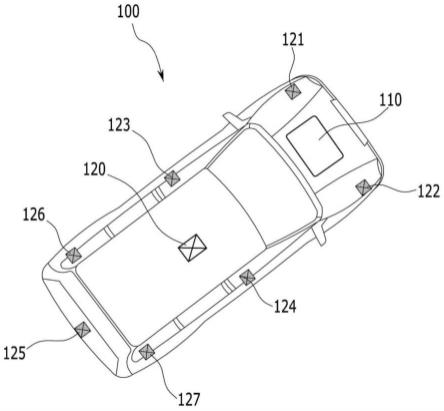
28.图1示出根据本发明实施例的无线充电车辆。
29.参照图1,无线充电车辆100包括次级充电板110、uwb控制器120和多个uwb标签121、122、123、124、125、126和127。无线充电车辆100可以包括需要充电的车辆,例如电动车辆、自动驾驶车辆或混合动力车辆。
30.次级充电板110可以通过由将参照图2描述的初级充电板210产生的磁场产生感应电流,并且可以为无线充电车辆100的电池充电。次级充电板110可以设置在车辆的下部,以在对电池充电时与初级充电板210具有适当的间隙。次级充电板110在图1中被示为设置在无线充电车辆100的前部,但次级充电板110的位置不限于此。
31.uwb标签121、122、123、124、125、126和127表示通过利用作为短距离无线通信协议的uwb技术来测量距离和方向的传感器。当从上方(在平面图中)俯视无线充电车辆100时,
uwb标签121、122、123、124、125、126和127可以被布置为围绕无线充电车辆100。
32.如上所述,第一uwb标签121可以设置在无线充电车辆100的左前部,第二uwb标签122可以设置在无线充电车辆100的右前部,第三uwb标签123可以设置在无线充电车辆100的中间左侧,第四uwb标签124可以设置在无线充电车辆100的中间右侧,第五uwb标签125可以设置在无线充电车辆100的后部中间,第六uwb标签126可以设置在无线充电车辆100的左后部,第七uwb标签127可以设置在无线充电车辆100的右后部。uwb标签121、122、123、124、125、126和127的位置和数量不受限制,uwb标签121、122、123、124、125、126和127可以根据需要设置在多个位置,也可以根据需要添加或删除。
33.uwb控制器120通过利用uwb标签121、122、123、124、125、126和127测量的传感器值来执行无线充电对准模式。无线充电对准模式可以参照图3到图7在本说明书的稍后部分中描述。
34.图2示出根据本发明实施例的无线充电站。
35.参照图2,无线充电站200包括初级充电板210、无线充电器220和至少一个uwb锚点(anchor)221。
36.初级充电板210可以接收电网或储能装置的电力,并且可以产生用于为无线充电车辆100充电的磁场。初级充电板210可以设置在停车场211的地面上,使得初级充电板210可以面向停车场211中的无线充电车辆100的次级充电板110。
37.无线充电器220可以控制提供给初级充电板210的电力,并且可以向用户提供无线充电车辆100的充电信息。
38.至少一个uwb锚点221可以周期性地发送用于诱导无线充电车辆100的充电位置的uwb信号或者可以根据无线充电车辆100的请求发送uwb信号。至少一个uwb锚点221可以设置在初级充电板210、无线充电器220和停车场211的至少一个边缘上。至少一个uwb锚点221可以设置在合适的位置上,用于诱导无线充电车辆100的充电位置,并且uwb锚点221的位置不受限制。
39.图3是示出根据本发明实施例的无线充电车辆的无线充电方法的流程图。图4示出根据本发明实施例的用于确定uwb锚点的位置象限的象限。图5示出根据本发明实施例的uwb锚点坐标的计算方法。图6示出根据本发明实施例的根据车辆的移动更新车辆位置的方法。
40.参照图3至图6,无线充电车辆100的uwb控制器120开始无线充电对准模式(s110)。无线充电对准模式表示将无线充电车辆100的次级充电板110对准在无线充电站200的初级充电板210上的过程。
41.uwb控制器120通过利用uwb标签121、122、123、124、125、126和127来扫描由uwb锚点221发送的uwb信号(s120)。
42.uwb控制器120可以比较由各个uwb标签121、122、123、124、125、126和127接收的uwb信号的强度(即,接收信号强度指示符(rssi))和距离值,并且可以确定初级充电板210的uwb锚点221所在的位置象限(s130)。如图4所示,参考无线充电车辆100的前行方向设置象限,位置象限可以确定为以无线充电车辆100为基准设置的象限之一。
43.详细地,uwb控制器120可以将设置在无线充电车辆100的中间左侧的第三uwb标签123的uwb信号强度和距离值与设置在无线充电车辆100的中间右侧的第四uwb标签124的
uwb信号强度和距离值进行比较,以确定uwb锚点221位于无线充电车辆100的右侧还是左侧。uwb控制器120可以将设置在无线充电车辆100前部的第一uwb标签121和第二uwb标签122中的一个的uwb信号强度和距离值与设置在无线充电车辆100后部的第五uwb标签125的uwb信号强度和距离值进行比较,以确定uwb锚点221位于无线充电车辆100的前侧还是后侧。uwb控制器120可以结合上述两个结果确定初级充电板210的uwb锚点221位于哪个象限上。
44.uwb控制器120基于所确定的象限来划分视线(line of sight,los)传感器值和非视线(non line of sight,nlos)传感器值(s140)。uwb控制器120可以将基于所确定的象限具有los的uwb标签确定为los传感器,并且可以将基于所确定的象限不具有los的uwb标签确定为nlos传感器。uwb控制器120可以利用los传感器的los传感器值以减少由nlos传感器的nlos传感器值引起的误差。
45.uwb控制器120通过利用los传感器值计算uwb锚点221的坐标(s150)。uwb控制器120可以计算uwb锚点221相对于无线充电车辆100的相对坐标。例如,如图5所示,当初级充电板210的uwb锚点221位于第一象限,并且测量五个uwb标签的距离值(t1、t2、t3、t4和t5)时,uwb控制器120可以通过利用如等式1所示的与los传感器值对应的距离值(t1、t2和t4)来计算uwb锚点221的坐标(x',y')。
46.等式1
47.t
12
=(y
′
w/2)2 (x
’‑
l/2)248.t
22
=(y
’‑
w/2)2 (x
’‑
l/2)249.t
42
=(y
’‑
w/2)2 (x
’‑
(l/2-xoffset))2[0050][0051][0052]
此处,l是车辆长度,w是车辆宽度,并且xoffset是横向uwb标签之间的距离。为了便于描述,省略了uwb锚点221的z轴坐标。
[0053]
随着uwb锚点221的坐标被计算,无线充电车辆100可以基于uwb锚221的坐标朝向初级充电板210的uwb锚点221移动。
[0054]
uwb控制器120可以根据无线充电车辆100的移动来更新车辆位置(s160)。如图6所示,uwb控制器120可以通过利用根据车辆移动的里程计信息来更新车辆位置。里程计信息可以从轮速传感器和偏航率(yaw rate)传感器获得,并且uwb控制器120可以通过利用轮速传感器值和偏航率传感器值来估计车辆位置。车辆位置可以如等式2所示更新。
[0055]
等式2
[0056][0057]
此处,x、y为前一时刻(t=k-1)的车辆位置,x'、y'为当前时刻(t=k)的车辆位置,ρ为车辆移动距离,θ是偏航角(yaw)。
[0058]
利用里程计信息估计的车辆位置可能存在误差,因此uwb控制器120可以利用los传感器值(uwb传感器距离值)来校正车辆位置的误差。即,uwb控制器120可以通过组合里程计信息和los传感器值来更新车辆位置。由于uwb控制器120利用具有los的los传感器值,因此距离值的准确度可以提高,并且车辆位置的误差可以被最小化。
[0059]
uwb控制器120确定充电板是否被对准成使得无线充电车辆100移动并且初级充电板210面向次级充电板110(s170)。当充电板没有对准时,uwb控制器120可以重复s130至s160的步骤,使得充电板对准。
[0060]
当充电板对准时,uwb控制器120完成无线充电对准模式,无线充电车辆100可以停止并关闭启动(off)(s180),并且可以开始无线充电(s190)。
[0061]
如上所述,无线充电车辆100可以通过利用uwb技术从远处找到无线充电站200的初级充电板210的位置,并且无线充电车辆100的次级充电板110可以通过无线充电车辆100的自动泊车功能和自动驾驶功能准确地对准在初级充电板210上,从而优化无线充电效率。
[0062]
下面将参照图7描述利用粒子滤波器方案的无线充电车辆100的无线充电方法。通过与参照图3至图6描述的特征相比较来描述差异。
[0063]
图7是示出根据本发明另一实施例的无线充电车辆的无线充电方法的流程图。
[0064]
参照图7,uwb控制器120开始无线充电对准模式(s210),并搜索uwb锚点221(s215)。
[0065]
uwb控制器120可以针对由各uwb标签121、122、123、124、125、126和127接收的uwb信号强度和距离值对uwb传感器值进行采样(s220)。
[0066]
uwb控制器120可以通过利用采样的uwb传感器值来估计uwb锚点221的位置象限(s225)。uwb控制器120可以通过比较在平面上围绕无线充电车辆100的各个uwb标签121、122、123、124、125、126和127的uwb传感器值来估计uwb锚点221所在的位置象限。
[0067]
uwb控制器120通过利用uwb标签121、122、123、124、125、126和127中具有los的los传感器的los传感器值来计算相对于无线充电车辆100的uwb锚点221的坐标(s230)。uwb锚点221的坐标可以如等式1中所示地计算。
[0068]
随着uwb锚221的坐标被计算,无线充电车辆100可以基于uwb锚点221的坐标向初级充电板210的uwb锚点221移动。
[0069]
uwb控制器120可以通过利用用于估计非线性系统位置的扩展卡尔曼滤波器(ekf)和用于估计车辆位置的粒子滤波器方案来估计和更新无线充电车辆100移动的位置。
[0070]
详细地,uwb控制器120可以通过利用里程计信息来预测粒子位置(s235),可以收集uwb传感器值(los传感器值)的实际测量值(s240),并且可以预处理uwb传感器值并更新粒子权重值(s245)。uwb控制器120可以重新采样粒子(s250),并且可以通过应用更新的粒子权重值来更新uwb锚点221的位置(s255)。uwb控制器120可以确定充电板是否被对准(s260),如果没有,可以重复s220至s255的步骤以通过利用扩展卡尔曼滤波器找到具有最高权重值的粒子。
[0071]
当充电板对准时,uwb控制器120可以完成无线充电对准模式,并且无线充电车辆100可以停止并关闭启动(off)(s265),并且可以开始无线充电(s270)。
[0072]
本发明的附图和实施例仅为本发明的示例,用于说明本发明,并不用于限制如所附权利要求书限定的本发明的范围。因此,本领域普通技术人员将理解的是,来自实施例的
各种修改或变化以及其它等同实施例是可能的。因此,本发明的保护范围可以由所附权利要求书的技术方案来限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。