1.本实用新型涉及滩涂施工装置技术领域,特别是涉及一种自动安平回转装置。
背景技术:
2.在滩涂施工时,人们往往依靠陆地设备或船舶等装置来进行施工,现有技术中申请号为202220522171.0的专利提供一种半潜式自航多功能施工平台,然而,该装置无自动调平功能,当滩涂存在坡度时,该装置将发生倾斜,连带搭载设备一并倾斜,可能发生倾覆事故,同时影响施工质量;同时,该装置无回旋功能,工作时只能调整整机的方位以实现搭载设备方位的调整,进而满足施工,操作不便,降低了施工工效。
技术实现要素:
3.为解决以上技术问题,本实用新型提供一种自动安平回转装置,避免发生倾覆事故以及影响施工质量,提高了施工工效。
4.为实现上述目的,本实用新型提供了如下方案:
5.本实用新型提供一种自动安平回转装置,包括中间平台、顶部平台、第一支撑机构、第一直线驱动机构、第二支撑机构、第二直线驱动机构、第一垂直度检定器、第二垂直度检定器、第一电动开关、第一电磁换向阀、第二电动开关、第二电磁换向阀和回转机构,所述第一直线驱动机构和所述第一支撑机构用于依次设置于底盘上,所述第一直线驱动机构和所述第一支撑机构的上端均与所述中间平台铰接;所述第二直线驱动机构和所述第二支撑机构依次设置于所述中间平台上,所述第二直线驱动机构和所述第二支撑机构的上端均与所述顶部平台铰接;所述第一直线驱动机构和所述第一支撑机构的排布方向与所述第二直线驱动机构和所述第二支撑机构的排布方向相垂直,所述第一垂直度检定器设置于所述中间平台上,所述第一垂直度检定器用于检定所述中间平台在所述第一直线驱动机构和所述第一支撑机构的排布方向上的水平情况,所述第二垂直度检定器设置于所述顶部平台上,所述第二垂直度检定器用于检定所述顶部平台在所述第二直线驱动机构和所述第二支撑机构的排布方向上的水平情况;所述回转机构设置于所述顶部平台上,所述回转机构的上部用于设置拟搭载设备,且所述回转机构能够带动所述拟搭载设备旋转;所述第一垂直度检定器包括第一驱动件,所述第一驱动件位于所述第一电动开关的第一触点和第二触点之间,所述第一触点与所述第一电磁换向阀串联接入第一电路中,所述第二触点与所述第一电磁换向阀串联接入第二电路中,当所述第一驱动件偏移至一侧并触发所述第一触点时,所述第一电路导通,所述第一电磁换向阀处于第一工作状态并使得所述第一直线驱动机构伸出,当所述第一驱动件偏移至另一侧并触发所述第二触点时,所述第二电路导通,所述第一电磁换向阀处于第二工作状态并使得所述第一直线驱动机构回缩;所述第二垂直度检定器包括第二驱动件,所述第二驱动件位于所述第二电动开关的第三触点和第四触点之间,所述第三触点与所述第二电磁换向阀串联接入第三电路中,所述第四触点与所述第二电磁换向阀串联接入第四电路中,当所述第二驱动件偏移至一侧并触发所述第三触点时,所述
第三电路导通,所述第二电磁换向阀处于第一工作状态并使得所述第二直线驱动机构伸出,当所述第二驱动件偏移至另一侧并触发所述第四触点时,所述第四电路导通,所述第二电磁换向阀处于第二工作状态并使得所述第二直线驱动机构回缩。
6.优选地,所述第一直线驱动机构包括至少两个第一直线驱动部件,各所述第一直线驱动部件的下端均用于固定于所述底盘上,各所述第一直线驱动部件的上端均通过球铰与所述中间平台的底部连接,多个所述第一直线驱动部件的排布方向与所述第一直线驱动机构和所述第一支撑机构的排布方向相垂直,所述第一直线驱动部件与所述第一电磁换向阀连接;所述第一支撑机构包括至少两个第一支撑柱,各所述第一支撑柱的下端均用于固定于所述底盘上,各所述第一支撑柱的上端均通过球铰与所述中间平台的底部连接,多个所述第一支撑柱的排布方向与所述第一直线驱动机构和所述第一支撑机构的排布方向相垂直。
7.优选地,所述第二直线驱动机构包括至少两个第二直线驱动部件,各所述第二直线驱动部件的下端均固定于所述中间平台上,各所述第二直线驱动部件的上端均通过球铰与所述顶部平台的底部连接,多个所述第二直线驱动部件的排布方向与所述第二直线驱动机构和所述第二支撑机构的排布方向相垂直,所述第二直线驱动部件与所述第二电磁换向阀连接;所述第二支撑机构包括至少两个第二支撑柱,各所述第二支撑柱的下端均固定于所述中间平台上,各所述第二支撑柱的上端均通过球铰与所述顶部平台的底部连接,多个所述第二支撑柱的排布方向与所述第二直线驱动机构和所述第二支撑机构的排布方向相垂直。
8.优选地,所述第一直线驱动部件为第一液压千斤顶,所述第二直线驱动部件为第二液压千斤顶。
9.优选地,还包括液压泵,所述第一电磁换向阀为第一液压电磁换向阀,所述液压泵、所述第一液压电磁换向阀和所述第一液压千斤顶通过第一液压管路连接形成第一液压工作回路进而能够实现所述第一液压千斤顶的伸缩;所述第二电磁换向阀为第二液压电磁换向阀,所述液压泵、所述第二液压电磁换向阀和所述第二液压千斤顶通过第二液压管路连接形成第二液压工作回路进而能够实现所述第二液压千斤顶的伸缩。
10.优选地,所述第一直线驱动机构还包括多个第一加强筋板,各所述第一加强筋板均用于与所述底盘和所述第一直线驱动部件外侧壁的下部连接;所述第一支撑机构还包括多个第二加强筋板,各所述第二加强筋板均用于与所述底盘和所述第一支撑柱外侧壁的下部连接;所述第二直线驱动机构还包括多个第三加强筋板,各所述第三加强筋板均与所述中间平台和所述第二直线驱动部件外侧壁的下部连接;所述第二支撑机构还包括多个第四加强筋板,各所述第四加强筋板均与所述中间平台和所述第二支撑柱外侧壁的下部连接。
11.优选地,所述第一直线驱动机构包括两个所述第一直线驱动部件,所述第一支撑机构包括两个所述第一支撑柱,所述第二直线驱动机构包括两个所述第二直线驱动部件,所述第二支撑机构包括两个所述第二支撑柱。
12.优选地,所述回转机构包括基座、内圈、外齿圈、动力齿轮、旋转驱动部件和多个滚珠,所述基座固定于所述顶部平台上,所述内圈固定于所述基座上,所述外齿圈套设于所述内圈外部,且所述外齿圈与所述内圈之间设置有多个所述滚珠,所述旋转驱动部件固定于所述基座的一侧,所述动力齿轮固定套设于所述旋转驱动部件的动力输出轴上,所述动力
齿轮与所述外齿圈相啮合,所述外齿圈用于安装所述拟搭载设备。
13.优选地,所述外齿圈的上表面设置有多个用于安装所述拟搭载设备的螺栓孔,所述旋转驱动部件为液压马达。
14.优选地,所述第一直线驱动机构和所述第一支撑机构用于由前至后依次设置于所述底盘上,所述第一垂直度检定器用于检定所述中间平台在前后方向上的水平情况,所述第二直线驱动机构和所述第二支撑机构由左至右依次设置于所述中间平台上,所述第二垂直度检定器用于检定所述顶部平台在左右方向上的水平情况。
15.本实用新型相对于现有技术取得了以下技术效果:
16.本实用新型的自动安平回转装置中第一直线驱动机构和第一支撑机构用于依次设置于底盘上,第一直线驱动机构和第一支撑机构的上端均与中间平台铰接;第二直线驱动机构和第二支撑机构依次设置于中间平台上,第二直线驱动机构和第二支撑机构的上端均与顶部平台铰接;第一直线驱动机构和第一支撑机构的排布方向与第二直线驱动机构和第二支撑机构的排布方向相垂直。工作时,第一垂直度检定器检定中间平台在第一直线驱动机构和第一支撑机构的排布方向上的水平情况,之后通过第一电动开关和第一电磁换向阀使得第一直线驱动机构伸缩对中间平台进行调平,第二垂直度检定器检定顶部平台在第二直线驱动机构和第二支撑机构的排布方向上的水平情况,之后通过第二电动开关和第二电磁换向阀使得第二直线驱动机构伸缩对顶部平台进行调平,进而使得顶部平台在第一直线驱动机构和第一支撑机构的排布方向上以及第二直线驱动机构和第二支撑机构的排布方向上均处于水平状态,以使得拟搭载设备处于水平状态,避免发生倾覆事故以及影响施工质量。回转机构设置于顶部平台上,回转机构的上部用于设置拟搭载设备,且回转机构能够带动拟搭载设备旋转,可在不调整整机机位的情况下,进行多角度施工,提高了施工工效。
附图说明
17.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
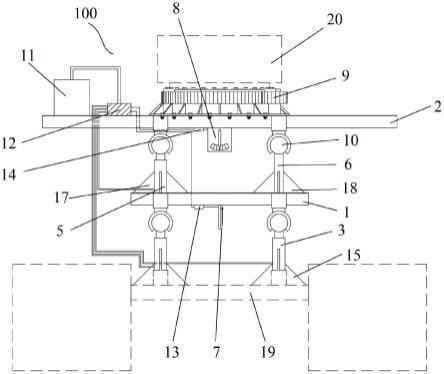
18.图1为本实用新型提供的自动安平回转装置的主视图;
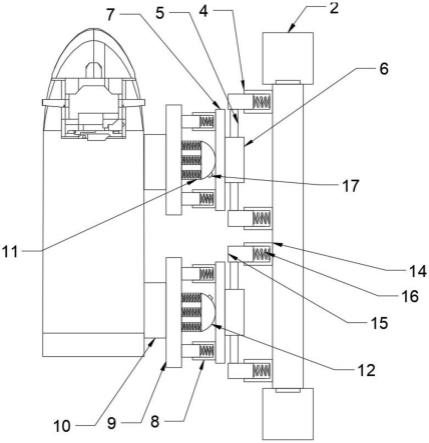
19.图2为本实用新型提供的自动安平回转装置的右视图;
20.图3为本实用新型提供的自动安平回转装置中回转机构的俯视图;
21.图4为本实用新型提供的自动安平回转装置中第一直线驱动部件和第一支撑柱的分布示意图;
22.图5为本实用新型提供的自动安平回转装置中第二直线驱动部件和第二支撑柱的分布示意图;
23.图6为本实用新型提供的自动安平回转装置中第一垂直度检定器的指针和第一驱动件未发生偏移时的工作原理图;
24.图7为本实用新型提供的自动安平回转装置中第一垂直度检定器的指针和第一驱动件未发生偏移时的电路原理图;
25.图8为本实用新型提供的自动安平回转装置中第一垂直度检定器的指针和第一驱动件向左偏移时的工作原理图;
26.图9为本实用新型提供的自动安平回转装置中第一垂直度检定器的指针和第一驱动件向左偏移时的电路原理图;
27.图10为图9中a处的局部放大图;
28.图11为本实用新型提供的自动安平回转装置中第一垂直度检定器的指针和第一驱动件向右偏移时的工作原理图;
29.图12为本实用新型提供的自动安平回转装置中第二直线驱动机构对顶部平台进行调平时的工作示意图;
30.图13为本实用新型提供的自动安平回转装置中第一直线驱动机构对中间平台进行调平时的工作示意图。
31.附图标记说明:100、自动安平回转装置;1、中间平台;2、顶部平台;3、第一直线驱动部件;4、第一支撑柱;5、第二直线驱动部件;6、第二支撑柱;7、第一垂直度检定器;71、第一驱动件;711、第一连杆;712、第一重锤;8、第二垂直度检定器;9、回转机构;91、基座;92、内圈;93、滚珠;94、外齿圈;95、动力齿轮;10、球铰;11、液压泵;12、第一电磁换向阀;121、第一壳体;122、第一内置活阀;123、第一电磁铁;124、第二电磁铁;13、第一电动开关;131、第一触点;132、第二触点;14、第二电动开关;15、第一加强筋板;16、第二加强筋板;17、第三加强筋板;18、第四加强筋板;19、底盘;20、拟搭载设备;21、第一电路;22、第二电路。
具体实施方式
32.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
33.本实用新型的目的是提供一种自动安平回转装置,避免发生倾覆事故以及影响施工质量,提高了施工工效。
34.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
35.如图1-图13所示,本实施例提供一种自动安平回转装置100,包括中间平台1、顶部平台2、第一支撑机构、第一直线驱动机构、第二支撑机构、第二直线驱动机构、第一垂直度检定器7、第二垂直度检定器8、第一电动开关13、第一电磁换向阀12、第二电动开关14、第二电磁换向阀和回转机构9,第一直线驱动机构和第一支撑机构用于依次设置于底盘19上,本实施例中的底盘19为名称为“半潜式自航多功能施工平台”的专利中公开的具有支撑和行走功能的机构,即该部分为现有技术。第一直线驱动机构和第一支撑机构的上端均与中间平台1铰接,第一直线驱动机构与第一电磁换向阀12连接,第一直线驱动机构伸缩能够带动中间平台1相对于第一支撑机构的顶端转动;第二直线驱动机构和第二支撑机构依次设置于中间平台1上,第二直线驱动机构和第二支撑机构的上端均与顶部平台2铰接,第二直线驱动机构与第二电磁换向阀连接,第二直线驱动机构伸缩能够带动顶部平台2相对于第二支撑机构的顶端转动;第一直线驱动机构和第一支撑机构的排布方向与第二直线驱动机构
和第二支撑机构的排布方向相垂直,第一垂直度检定器7设置于中间平台1上,第一垂直度检定器7用于检定中间平台1在第一直线驱动机构和第一支撑机构的排布方向上的水平情况,第二垂直度检定器8设置于顶部平台2上,第二垂直度检定器8用于检定顶部平台2在第二直线驱动机构和第二支撑机构的排布方向上的水平情况;回转机构9设置于顶部平台2上,回转机构9的上部用于设置拟搭载设备20,且回转机构9能够带动拟搭载设备20旋转。
36.第一垂直度检定器7包括第一驱动件71,第一驱动件71上端转动安装于第一垂直度检定器7的壳体上,且第一驱动件71能够与第一垂直度检定器7的指针同步运动,第一驱动件71包括转动安装于第一垂直度检定器7的壳体上的第一连杆711和设置于第一连杆711下端的第一重锤712。第一驱动件71位于第一电动开关13的第一触点131和第二触点132之间,第一触点131与第一电磁换向阀12串联接入第一电路21中,第二触点132与第一电磁换向阀12串联接入第二电路22中,当第一驱动件71未发生偏移,即处于正中间时,第一触点131和第二触点132均不被触发,第一电动开关13处于关闭状态,当第一驱动件71偏移至一侧并触发第一触点131时,第一电路21导通,第一电磁换向阀12处于第一工作状态并使得第一直线驱动机构伸出,当第一驱动件71偏移至另一侧并触发第二触点132时,第二电路22导通,第一电磁换向阀12处于第二工作状态并使得第一直线驱动机构回缩。具体地,第一电磁换向阀12包括位于第一壳体121内部的第一内置活阀122,以及位置第一壳体121两侧第一电磁铁123和第二电磁铁124,第一触点131与第一电磁铁123串联接入第一电路21中,第二触点132与第二电磁铁124串联接入第二电路22中。本实施例中第一电动开关13对第一电磁换向阀12的控制方式为现有技术中的控制方式。
37.第二垂直度检定器8包括第二驱动件,第二驱动件上端转动安装于第二垂直度检定器8的壳体上,且第二驱动件能够与第二垂直度检定器8的指针同步运动,第二驱动件包括转动安装于第二垂直度检定器8的壳体上的第二连杆和设置于第二连杆下端的第二重锤。第二驱动件位于第二电动开关14的第三触点和第四触点之间,第三触点与第二电磁换向阀串联接入第三电路中,第四触点与第二电磁换向阀串联接入第四电路中,当第二驱动件未发生偏移,即处于正中间时,第三触点和第四触点均不被触发,第二电动开关14处于关闭状态,当第二驱动件偏移至一侧并触发第三触点时,第三电路导通,第二电磁换向阀处于第一工作状态并使得第二直线驱动机构伸出,当第二驱动件偏移至另一侧并触发第四触点时,第四电路导通,第二电磁换向阀处于第二工作状态并使得第二直线驱动机构回缩。具体地,第二电磁换向阀包括位于第二壳体内部的第二内置活阀,以及位置第二壳体两侧第三电磁铁和第四电磁铁,第三触点与第三电磁铁串联接入第三电路中,第四触点与第四电磁铁串联接入第四电路中。本实施例中第二电动开关14对第二电磁换向阀的控制方式为现有技术中的控制方式。
38.工作时,第一垂直度检定器7检定中间平台1在第一直线驱动机构和第一支撑机构的排布方向上的水平情况,之后通过第一电动开关13和第一电磁换向阀12使得第一直线驱动机构伸缩对中间平台1进行调平,第二垂直度检定器8检定顶部平台2在第二直线驱动机构和第二支撑机构的排布方向上的水平情况,之后通过第二电动开关14和第二电磁换向阀使得第二直线驱动机构伸缩对顶部平台2进行调平,进而使得顶部平台2在第一直线驱动机构和第一支撑机构的排布方向上以及第二直线驱动机构和第二支撑机构的排布方向上均处于水平状态,以使得拟搭载设备20处于水平状态,避免发生倾覆事故以及影响施工质量。
回转机构9能够带动拟搭载设备20旋转,可在不调整整机机位的情况下,将拟搭载设备20旋转至所需施工位置,进而能够进行多角度施工,提高了施工工效。
39.具体地,第一直线驱动机构包括至少两个第一直线驱动部件3,各第一直线驱动部件3的下端均用于固定于底盘19上,各第一直线驱动部件3的上端均通过球铰10与中间平台1的底部连接,球铰10包括球窝和设置于球窝中的球头,第一直线驱动部件3的上端与球头固定连接,球窝固定于中间平台1的底部,多个第一直线驱动部件3的排布方向与第一直线驱动机构和第一支撑机构的排布方向相垂直,第一直线驱动部件3与第一电磁换向阀12连接;第一支撑机构包括至少两个第一支撑柱4,各第一支撑柱4的下端均用于固定于底盘19上,各第一支撑柱4的上端均通过球铰10与中间平台1的底部连接,球铰10包括球窝和设置于球窝中的球头,第一支撑柱4的上端与球头固定连接,球窝固定于中间平台1的底部,多个第一支撑柱4的排布方向与第一直线驱动机构和第一支撑机构的排布方向相垂直。
40.具体地,第二直线驱动机构包括至少两个第二直线驱动部件5,各第二直线驱动部件5的下端均固定于中间平台1上,各第二直线驱动部件5的上端均通过球铰10与顶部平台2的底部连接,球铰10包括球窝和设置于球窝中的球头,第二直线驱动部件5的上端与球头固定连接,球窝固定于顶部平台2的底部,多个第二直线驱动部件5的排布方向与第二直线驱动机构和第二支撑机构的排布方向相垂直,第二直线驱动部件5与第二电磁换向阀连接;第二支撑机构包括至少两个第二支撑柱6,各第二支撑柱6的下端均固定于中间平台1上,各第二支撑柱6的上端均通过球铰10与顶部平台2的底部连接,球铰10包括球窝和设置于球窝中的球头,第二支撑柱6的上端与球头固定连接,球窝固定于顶部平台2的底部,多个第二支撑柱6的排布方向与第二直线驱动机构和第二支撑机构的排布方向相垂直。
41.于本具体实施例中,第一直线驱动部件3为第一液压千斤顶,第一液压千斤顶的缸体用于固定于底盘19上,第一液压千斤顶的活塞杆的上端通过球铰10与中间平台1的底部连接;第二直线驱动部件5为第二液压千斤顶,第二液压千斤顶的缸体固定于中间平台1上,第二液压千斤顶的活塞杆的上端通过球铰10与顶部平台2的底部连接。本实施例中采用50t的液压千斤顶,缸体的直径为180mm,长为0.6m,活塞杆的直径为100mm,行程为0.4m,最大长度为1.0m。
42.具体地,本实施例中还包括液压泵11,第一电磁换向阀12为第一液压电磁换向阀,液压泵11、第一液压电磁换向阀和第一液压千斤顶通过第一液压管路连接形成第一液压工作回路进而能够实现第一液压千斤顶的伸缩,液压泵11用于提供第一液压千斤顶的动力。需要说明的是,液压泵11、第一液压电磁换向阀和第一液压千斤顶连接形成的第一液压工作回路中的第一液压管路的具体连接方式为现有技术中的连接方式,此处不再赘述。
43.以自动安平回转装置100处于图2中的状态进行说明,图中的左侧为自动安平回转装置100的前端,图中的右侧为自动安平回转装置100的后端,如图6和图7所示,当第一垂直度检定器7的指针和第一驱动件71未发生偏移时,第一电动开关13关闭,第一液压电磁换向阀处于不工作状态,第一液压电磁换向阀的第一内置活阀122位于中间位置,阻断通路,此时第一液压管路不工作。如图8-10和图13所示,当第一垂直度检定器7的指针和第一驱动件71向左偏移并触发第一触点131时,第一电动开关13与第一液压电磁换向阀之间左侧的第一电路21接通,第一液压电磁换向阀的第一内置活阀122在左侧的第一电磁铁123的作用下向左偏移,第一液压管路接通,液压油在液压泵11的作用下通入第一液压千斤顶中,使得第
一液压千斤顶的活塞杆伸出,进而对中间平台1进行调平。如图11所示,当第一垂直度检定器7的指针和第一驱动件71向右偏移并触发第二触点132时,第一电动开关13与第一液压电磁换向阀之间的右侧的第二电路22接通,第一液压电磁换向阀的第一内置活阀122在右侧的第二电磁铁124的作用下向右偏移,第一液压管路接通,液压油在液压泵11的作用下通入第一液压千斤顶中,使得第一液压千斤顶的活塞杆回缩,进而对中间平台1进行调平。
44.本实施例中的第二电磁换向阀为第二液压电磁换向阀,液压泵11、第二液压电磁换向阀和第二液压千斤顶通过第二液压管路连接形成第二液压工作回路进而能够实现第二液压千斤顶的伸缩,液压泵11用于提供第二液压千斤顶的动力。需要说明的是,液压泵11、第二液压电磁换向阀和第二液压千斤顶连接形成的第二液压工作回路中的第二液压管路的具体连接方式为现有技术中的连接方式,此处不再赘述。
45.以自动安平回转装置100处于图1中的状态进行说明,当第二垂直度检定器8的指针和第二驱动件未发生偏移时,第二电动开关1关闭,第二液压电磁换向阀处于不工作状态,第二液压电磁换向阀的第二内置活阀位于中间位置,阻断通路,此时第二液压管路不工作。如图12所示,当第二垂直度检定器8的指针和第二驱动件向左偏移并触发第三触点时,第二电动开关1与第二液压电磁换向阀之间左侧的第三电路接通,第二液压电磁换向阀的第二内置活阀在左侧的第三电磁铁的作用下向左偏移,第二液压管路接通,液压油在液压泵11的作用下通入第二液压千斤顶中,使得第二液压千斤顶的活塞杆伸出,进而对顶部平台2进行调平。当第二垂直度检定器8的指针和第二驱动件向右偏移并触发第四触点时,第二电动开关1与第二液压电磁换向阀之间右侧的第四电路接通,第二液压电磁换向阀的第二内置活阀在右侧的第四电磁铁的作用下向右偏移,第二液压管路接通,液压油在液压泵11的作用下通入第二液压千斤顶中,使得第二液压千斤顶的活塞杆回缩,进而对顶部平台2进行调平。
46.于本具体实施例中,液压泵11、第一电磁换向阀12和第二电磁换向阀均设置于顶部平台2的上表面,第一电动开关13设置于中间平台1的下表面,第二电动开关1设置于顶部平台2的下表面。第一垂直度检定器7设置于中间平台1的下部,且第一垂直度检定器7位于第一直线驱动机构与第一支撑机构之间;第二垂直度检定器8设置于顶部平台2的下部,且第二垂直度检定器8位于第二直线驱动机构与第二支撑机构之间。
47.具体地,第一直线驱动机构还包括多个第一加强筋板15,各第一加强筋板15均用于与底盘19和第一直线驱动部件3外侧壁的下部连接,进而使得第一直线驱动部件3安装牢固;第一支撑机构还包括多个第二加强筋板16,各第二加强筋板16均用于与底盘19和第一支撑柱4外侧壁的下部连接,进而使得第一支撑柱4安装牢固;第二直线驱动机构还包括多个第三加强筋板17,各第三加强筋板17均与中间平台1和第二直线驱动部件5外侧壁的下部连接,进而使得第二直线驱动部件5安装牢固;第二支撑机构还包括多个第四加强筋板18,各第四加强筋板18均与中间平台1和第二支撑柱6外侧壁的下部连接,进而使得第二支撑柱6安装牢固。本实施例中的第一加强筋板15、第二加强筋板16、第三加强筋板17和第四加强筋板18均为三角形筋板。
48.于本具体实施例中,中间平台1采用2根250mm
×
10mm(边长
×
壁厚)的方钢,2根200mm
×
10mm(边长
×
壁厚)的方钢形成井字形构架,拼焊成形,上铺10mm厚的钢板。顶部平台2采用2根250mm
×
10mm(边长
×
壁厚)的方钢,9根200mm
×
10mm(边长
×
壁厚)的方钢形成
井字形构架,拼焊成形,上铺10mm厚的钢板。第一支撑柱4和第二支撑柱6均采用250mm
×
10mm(边长
×
壁厚)的方钢制作,下部与底盘19或中间平台1焊接,并焊接4块360mm
×
360mm
×
20mm的三角形筋板。
49.于本具体实施例中,第一直线驱动机构包括两个第一直线驱动部件3,第一支撑机构包括两个第一支撑柱4,第二直线驱动机构包括两个第二直线驱动部件5,第二支撑机构包括两个第二支撑柱6。
50.如图3所示,回转机构9包括基座91、内圈92、外齿圈94、动力齿轮95、旋转驱动部件和多个滚珠93,基座91固定于顶部平台2上,内圈92固定于基座91上,具体地,基座91通过螺栓固定于顶部平台2上,内圈92通过螺栓固定于基座91上,外齿圈94套设于内圈92外部,且外齿圈94与内圈92之间设置有多个滚珠93,外齿圈94能够相对于内圈92转动,旋转驱动部件固定于基座91的一侧,动力齿轮95固定套设于旋转驱动部件的动力输出轴上,动力齿轮95与外齿圈94相啮合,外齿圈94用于安装拟搭载设备20。工作时,控制旋转驱动部件带动动力齿轮95转动,进而使得与动力齿轮95相啮合的外齿圈94转动,以使得安装于外齿圈94上的拟搭载设备20转动,能够方便地对拟搭载设备20的方位进行调整,进而能够进行多角度施工,提高了施工工效。
51.于本具体实施例中,外齿圈94的上表面设置有多个用于安装拟搭载设备20的螺栓孔,拟搭载设备20的底部经过加工,使其能与外齿圈94连接,通过螺栓将拟搭载设备20安装于外齿圈94上,旋转驱动部件为液压马达。
52.于本具体实施例中,第一直线驱动机构和第一支撑机构用于由前至后依次设置于底盘19上,第一垂直度检定器7用于检定中间平台1在前后方向上的水平情况,第二直线驱动机构和第二支撑机构由左至右依次设置于中间平台1上,第二垂直度检定器8用于检定顶部平台2在左右方向上的水平情况。
53.本说明书中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。