1.本实用新型涉及地板裱板加工设备领域,具体为钩吸双模式精密数控轨道锯。
背景技术:
2.地板裱板即地板衬板,亦称“毛地板”;为了提高木地板的铺装质量,常常在地板与木搁梁之间铺设的一层衬板;一般选用定向结构板、刨花板或中密度纤维板等;地板裱板的加工过程中,数控锯床一般为必要的加工设备,以实现对板材的切割等工艺。
3.在对板材加工的过程中,因机械抓钩需要勾住木材10-20mm部分材料的厚度,才能进行安全稳定的生产加工,遂无法对剩余25-30mm的板材进行加工,在加工的过程中须更换至其他机床设备进行二次加工,就会产生二次装夹定位,并且剩余木材尺寸比较薄,放置时间过长就会形成侧弯,极大的降低了木材的利用率,给人们的使用过程带来了一定的不利影响,为此,我们提出钩吸双模式精密数控轨道锯。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本实用新型提供了钩吸双模式精密数控轨道锯,具备钩吸一体化、一机多用等优点,可以有效解决背景技术中的问题。
6.(二)技术方案
7.为实现上述目的,本实用新型采取的技术方案为:钩吸双模式精密数控轨道锯,包括机床下框架、位于机床下框架上端的机床中框架以及位于机床中框架上端的机床上框架,还包括;
8.位于机床上框架前端的吸盘式抓具机构,用于固定表面光洁的木材;
9.设置于机床上框架上端的气动机械式抓具机构,用于固定表面粗糙的木材;
10.所述机床中框架固定安装于机床下框架的上端,且机床上框架固定安装于机床中框架上端外表面的后侧,所述吸盘式抓具机构固定安装于机床上框架的前端,且气动机械式抓具机构固定安装于机床上框架的上端。
11.优选的,所述机床下框架包括其本体下框架主体,且下框架主体上段的前后两侧均设置有线性滑轨系统一,两个所述线性滑轨系统一的主体外壁均设置有两个用于配合传动的线性滑块安装座,所述下框架主体其中段设置有多个横杆,且多个横杆的上端设置有用于传动的拖链系统,其一所述横杆的外壁设置有用于润滑的润滑系统,且下框架主体其前端对内侧的一侧设置有用于滤气的气源处理器,所述下框架主体前端的上段对内侧设置有精密斜齿条。
12.优选的,两个所述线性滑轨系统一其主体分别固定安装于下框架主体前后两侧的上端,且四个线性滑块安装座分别滑动连接于两个线性滑轨系统一主体的外壁,所述拖链系统的主体固定安装于位于下框架主体中段内部多个横杆的上端外表面,且润滑系统的主体固定安装于其一横杆的外壁,所述气源处理器的主体固定安装于下框架主体前端的一
侧。
13.优选的,所述机床中框架包括其主体中框架主体,且中框架主体的上端对称设置有四个用于传动的线性滑轨系统二,所述中框架主体上端位于两组线性滑轨系统二的内侧设置有用于放置木材的木材托架。
14.优选的,所述中框架主体的中段设置有深沟球轴承,且深沟球轴承中段外壁的前端设置有油路分配器,其一所述木材托架的一侧设置有机床中框架的驱动中枢中框架驱动机构,且中框架主体上端的中段设置有与吸盘式抓具机构相接的上框架进尺机构。
15.优选的,所述机床上框架包括其主体上框架主体,且上框架主体的上端固定安装有用于传动的线性滑轨系统三。
16.优选的,所述吸盘式抓具机构包括其主体吸盘抓具靠板,且吸盘抓具靠板上左右对称设置有多个真空吸盘,多个所述真空吸盘的上端均附带有用于固定的固定底座,且固定底座的内壁均螺纹连接有螺纹直通,所述真空吸盘基于螺纹直通由吸盘抓具靠板的下端贯穿至其上端且与之滑动连接,且螺纹直通的上段外壁设置有用于固定的手扭锁紧螺母,所述手扭锁紧螺母位于吸盘抓具靠板的上端。
17.优选的,所述气动机械式抓具机构包括固定安装于机床上框架上端的移动横梁,且移动横梁前端的左右两侧均固定安装有伸缩气缸,所述移动横梁的前端亦设置有用于固定木材的四个气动抓具机构,且四个气动抓具机构相对于两个伸缩气缸交错设置。
18.(三)有益效果
19.与现有技术相比,本实用新型提供了钩吸双模式精密数控轨道锯,具备以下有益效果:
20.该钩吸双模式精密数控轨道锯,将现有的设备进行整合,钩吸一体化,如若木材的密度较低、表面较为粗糙,采用气动机械式抓具机构,将木材牢牢抓住进行加工,如若木材的密度较高,表面光滑整洁,可以采用吸盘式抓具机构进行固定,实现对整体木材的一次性装夹,机械气动抓木机构抓大径木材时牢固稳定,精确度高,真空吸盘式抓木机构可将木材一次性加工至成品,无需二次更换至其他设备进行加工,遂可以将材料整体一次性加工至最后,有效的简化了加工工艺流程,间接的提高了木材利用率,同时也提高了企业生产效率。
附图说明
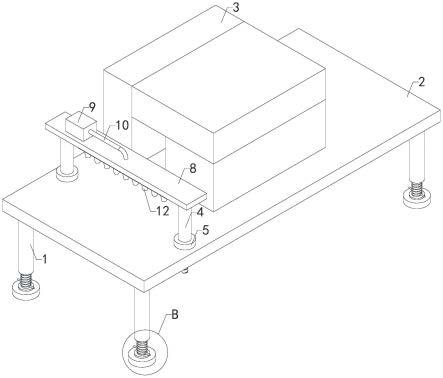
21.图1为本实用新型钩吸双模式精密数控轨道锯整体结构的正视图。
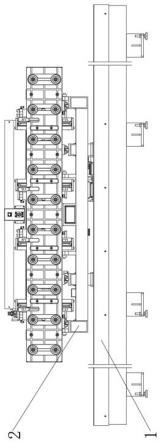
22.图2为本实用新型钩吸双模式精密数控轨道锯整体结构的侧视图。
23.图3为本实用新型钩吸双模式精密数控轨道锯用机床下框架的正视图。
24.图4为本实用新型钩吸双模式精密数控轨道锯用机床下框架的俯视图。
25.图5为本实用新型钩吸双模式精密数控轨道锯用机床中框架的俯视图。
26.图6为本实用新型钩吸双模式精密数控轨道锯用机床上框架的侧视图。
27.图7为本实用新型钩吸双模式精密数控轨道锯用吸盘式抓具机构的俯视图。
28.图8为本实用新型钩吸双模式精密数控轨道锯例图7中a处的放大示意图。
29.图9为本实用新型钩吸双模式精密数控轨道锯用气动机械式抓具机构的俯视图。
30.图10为本实用新型钩吸双模式精密数控轨道锯用气动机械式抓具机构的工作状
态图。
31.图11为本实用新型钩吸双模式精密数控轨道锯用吸盘式抓具机构的工作状态图。
32.图中:
33.1、机床下框架;2、机床中框架;3、机床上框架;4、吸盘式抓具机构;5、气动机械式抓具机构;
34.101、下框架主体;102、润滑系统;103、线性滑轨系统一;104、线性滑块安装座;105、拖链系统;106、精密斜齿条;107、气源处理器;
35.201、中框架主体;202、线性滑轨系统二;203、木材托架;204、油路分配器;205、上框架进尺机构;206、中框架驱动机构;207、深沟球轴承;
36.301、上框架主体;302、线性滑轨系统三;
37.401、吸盘抓具靠板;402、真空吸盘;403、固定底座;404、螺纹直通;405、手扭锁紧螺母;
38.501、移动横梁;502、伸缩气缸;503、气动抓具机构。
具体实施方式
39.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面将结合本实用新型实施例中的附图,进一步阐述本实用新型,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
40.为针对现有技术的不足,如图1、2所示,本实用新型提供了钩吸双模式精密数控轨道锯,机床中框架2固定安装于机床下框架1的上端,且机床上框架3固定安装于机床中框架2上端外表面的后侧,吸盘式抓具机构4固定安装于机床上框架3的前端,且气动机械式抓具机构5固定安装于机床上框架3的上端。
41.具体的,且如图3~6所示,钩吸双模式精密数控轨道锯用的机床下框架1、机床中框架2与机床上框架3,两个线性滑轨系统一103其主体分别固定安装于下框架主体101前后两侧的上端,且四个线性滑块安装座104分别滑动连接于两个线性滑轨系统一103主体的外壁,拖链系统105的主体固定安装于位于下框架主体101中段内部多个横杆的上端外表面,且润滑系统102的主体固定安装于其一横杆的外壁,气源处理器107的主体固定安装于下框架主体101前端的一侧。
42.需要说明的是,本实用新型为钩吸双模式精密数控轨道锯,通过设置的机床下框架1、机床中框架2与机床上框架3,下框架主体101采用200*100*8高强度矩形方管结构工艺焊接制作而成;
43.中框架主体201四根主梁采用150*100*6高强度矩形方管结构工艺焊接制作,各配合安装面均铺装焊接18mm钢板,增强设备整体刚性;
44.上框架主体301采用100*80*5高强度矩形方管结构工艺焊接制作,各配合安装面均铺装焊接15-45mm钢板,增强设备整体刚性。
45.其中,精密斜齿条106与线性滑轨系统一103位处同侧,使得装置整体结构紧凑,体积小巧,便于加工制作,方便后期维护;
46.中框架主体201四根主梁上均装配线性滑轨系统二202,每条线性滑轨系统二202配有两个线性滑块,这样设计保证上框架进尺机构205在工作时,不会出现左右摆动,因左右两端的线性滑轨系统二202分别具备四个线性滑块,形成十字交叉受力,从而保证上框架进尺机构205的工作稳定性。
47.具体的,如图7~11所示,钩吸双模式精密数控轨道锯用的吸盘式抓具机构4与气动机械式抓具机构5,吸盘式抓具机构4包括其主体吸盘抓具靠板401,且吸盘抓具靠板401上左右对称设置有多个真空吸盘402,多个真空吸盘402的上端均附带有用于固定的固定底座403,且固定底座403的内壁均螺纹连接有螺纹直通404,真空吸盘402基于螺纹直通404由吸盘抓具靠板401的下端贯穿至其上端且与之滑动连接,且螺纹直通404的上段外壁设置有用于固定的手扭锁紧螺母405,手扭锁紧螺母405位于吸盘抓具靠板401的上端;
48.气动机械式抓具机构5包括固定安装于机床上框架3上端的移动横梁501,且移动横梁501前端的左右两侧均固定安装有伸缩气缸502,移动横梁501的前端亦设置有用于固定木材的四个气动抓具机构503,且四个气动抓具机构503相对于两个伸缩气缸502交错设置。
49.需要说明的是,本实用新型为钩吸双模式精密数控轨道锯,通过设置的吸盘式抓具机构4与气动机械式抓具机构5,吸盘式抓具机构4整体采用2500mm*300mm*65mm qt500铸铁板,经cnc机床一次性加工完成,再经过热处理,表面防腐镀层处理;
50.移动横梁501采用120*80*8高强度矩形方管结构工艺焊接制作,各配合安装面均铺装焊接20mm钢板,增强设备整体刚性;
51.在对吸盘式抓具机构4安装的过程中,先将螺纹直通404的下段旋入固定底座403的上段内壁,而后将真空吸盘402通过固定底座403基于螺纹直通404由吸盘抓具靠板401的下端贯穿至其上端,再通过手扭锁紧螺母405旋至螺纹直通404的上段外壁拧紧即可;
52.在对木材加工的过程中,操作工人将木材放置于机床的上端,此时木材位于木材托架203的上端,并且通过线性滑轨系统二202给进木材至吸盘式抓具机构4处吸合,而后移动横梁501开始运作,并且通过伸缩气缸502、气动抓具机构503相互配合,实现对木材的抓取。
53.其中,机械气动抓木机构抓大径木材时牢固稳定,精确度高,真空吸盘式抓木机构可将木材一次性加工至成品,无需二次更换至其他设备进行加工,遂可以将材料整体一次性加工至最后,有效的简化了加工工艺流程,间接的提高了木材利用率,同时也提高了企业生产效率。
54.综上,本实用新型的基本工作原理为:在对吸盘式抓具机构4安装的过程中,先将螺纹直通404的下段旋入固定底座403的上段内壁,而后将真空吸盘402通过固定底座403基于螺纹直通404由吸盘抓具靠板401的下端贯穿至其上端,再通过手扭锁紧螺母405旋至螺纹直通404的上段外壁拧紧即可,在对木材加工的过程中,操作工人将木材放置于机床的上端,此时木材位于木材托架203的上端,并且通过线性滑轨系统二202给进木材至吸盘式抓具机构4处吸合,而后移动横梁501开始运作,并且通过伸缩气缸502、气动抓具机构503相互配合,实现对木材的抓取。
55.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述
的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。