技术特征:
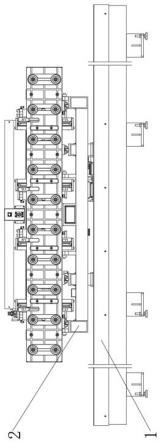
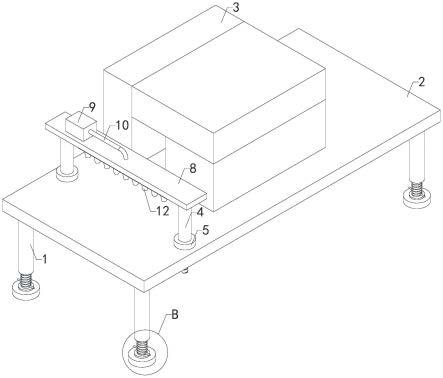
1.钩吸双模式精密数控轨道锯,包括机床下框架(1)、位于机床下框架(1)上端的机床中框架(2)以及位于机床中框架(2)上端的机床上框架(3),其特征在于:还包括;位于机床上框架(3)前端的吸盘式抓具机构(4),用于固定表面光洁的木材;设置于机床上框架(3)上端的气动机械式抓具机构(5),用于固定表面粗糙的木材;所述机床中框架(2)固定安装于机床下框架(1)的上端,且机床上框架(3)固定安装于机床中框架(2)上端外表面的后侧,所述吸盘式抓具机构(4)固定安装于机床上框架(3)的前端,且气动机械式抓具机构(5)固定安装于机床上框架(3)的上端。2.根据权利要求1所述的钩吸双模式精密数控轨道锯,其特征在于:所述机床下框架(1)包括其本体下框架主体(101),且下框架主体(101)上段的前后两侧均设置有线性滑轨系统一(103),两个所述线性滑轨系统一(103)的主体外壁均设置有两个用于配合传动的线性滑块安装座(104),所述下框架主体(101)其中段设置有多个横杆,且多个横杆的上端设置有用于传动的拖链系统(105),其一所述横杆的外壁设置有用于润滑的润滑系统(102),且下框架主体(101)其前端对内侧的一侧设置有用于滤气的气源处理器(107),所述下框架主体(101)前端的上段对内侧设置有精密斜齿条(106)。3.根据权利要求2所述的钩吸双模式精密数控轨道锯,其特征在于:两个所述线性滑轨系统一(103)其主体分别固定安装于下框架主体(101)前后两侧的上端,且四个线性滑块安装座(104)分别滑动连接于两个线性滑轨系统一(103)主体的外壁,所述拖链系统(105)的主体固定安装于位于下框架主体(101)中段内部多个横杆的上端外表面,且润滑系统(102)的主体固定安装于其一横杆的外壁,所述气源处理器(107)的主体固定安装于下框架主体(101)前端的一侧。4.根据权利要求1所述的钩吸双模式精密数控轨道锯,其特征在于:所述机床中框架(2)包括其主体中框架主体(201),且中框架主体(201)的上端对称设置有四个用于传动的线性滑轨系统二(202),所述中框架主体(201)上端位于两组线性滑轨系统二(202)的内侧设置有用于放置木材的木材托架(203)。5.根据权利要求4所述的钩吸双模式精密数控轨道锯,其特征在于:所述中框架主体(201)的中段设置有深沟球轴承(207),且深沟球轴承(207)中段外壁的前端设置有油路分配器(204),其一所述木材托架(203)的一侧设置有机床中框架(2)的驱动中枢中框架驱动机构(206),且中框架主体(201)上端的中段设置有与吸盘式抓具机构(4)相接的上框架进尺机构(205)。6.根据权利要求1所述的钩吸双模式精密数控轨道锯,其特征在于:所述机床上框架(3)包括其主体上框架主体(301),且上框架主体(301)的上端固定安装有用于传动的线性滑轨系统三(302)。7.根据权利要求1所述的钩吸双模式精密数控轨道锯,其特征在于:所述吸盘式抓具机构(4)包括其主体吸盘抓具靠板(401),且吸盘抓具靠板(401)上左右对称设置有多个真空吸盘(402),多个所述真空吸盘(402)的上端均附带有用于固定的固定底座(403),且固定底座(403)的内壁均螺纹连接有螺纹直通(404),所述真空吸盘(402)基于螺纹直通(404)由吸盘抓具靠板(401)的下端贯穿至其上端且与之滑动连接,且螺纹直通(404)的上段外壁设置有用于固定的手扭锁紧螺母(405),所述手扭锁紧螺母(405)位于吸盘抓具靠板(401)的上端。
8.根据权利要求1所述的钩吸双模式精密数控轨道锯,其特征在于:所述气动机械式抓具机构(5)包括固定安装于机床上框架(3)上端的移动横梁(501),且移动横梁(501)前端的左右两侧均固定安装有伸缩气缸(502),所述移动横梁(501)的前端亦设置有用于固定木材的四个气动抓具机构(503),且四个气动抓具机构(503)相对于两个伸缩气缸(502)交错设置。
技术总结
本实用新型公开了钩吸双模式精密数控轨道锯,涉及地板裱板加工设备领域,包括机床下框架、位于机床下框架上端的机床中框架以及位于机床中框架上端的机床上框架,还包括位于机床上框架前端的吸盘式抓具机构,用于固定表面光洁的木材,设置于机床上框架上端的气动机械式抓具机构,用于固定表面粗糙的木材。本实用新型所述的钩吸双模式精密数控轨道锯,将现有的设备进行整合,钩吸一体化,如若木材的密度较低、表面较为粗糙,采用气动机械式抓具机构,将木材牢牢抓住进行加工,如若木材的密度较高,表面光滑整洁,可以采用吸盘式抓具机构进行固定,实现对整体木材的一次性装夹,带来更好的使用前景。好的使用前景。好的使用前景。
技术研发人员:王超
受保护的技术使用者:大连因万特自动化设备有限公司
技术研发日:2022.10.17
技术公布日:2023/2/6
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。