1.本实用新型涉及实验室自动化设备,更具体地说,涉及一种实验室用升降倒样机。
背景技术:
2.实验室自动化系统是一种用于冶金企业金属样品制备,已经传输、光谱分析数据上传的系统,由于各个企业的实验室不同,在样品传输的要求不一样,工位多少和空间的垂直不同,传输的方向也会不同。
3.现有的样品传送线大多使用廉价线性输送带,使用维护简单,但也存在劣势:只能直线连接在各工位点间,如果物件组装和加工工位多,各工位又在垂直空间不同点位和角度的情况,输送带转移物件就无能为力。如果使用专门的机械手进行就会增加成本,且机械手转动的动作空间较大。
技术实现要素:
4.针对现有技术中存在的上述缺陷,本实用新型的目的是提供一种实验室用升降倒样机,解决现有实验室多点工位及垂直空间上传输倾倒样品困难的问题。
5.为实现上述目的,本实用新型采用如下技术方案:
6.一种实验室用升降倒样机,包括电气控制箱、输送机构、定位机构、升降/移动机构和倒样机构;
7.所述电气控制箱控制所述输送机构、所述定位机构、所述升降/移动机构和所述倒样机构的运行动作;
8.所述输送机构包括第一输送带和第二输送带,所述第一输送带位于所述第二输送带的上方,且所述第一输送带与所述第二输送带之间形成夹角,所述第一输送带上具有大样品杯,所述第二输送带上具有小样品杯;
9.所述定位机构包括定位旋转气缸、定位爪和定位块,所述定位旋转气缸设于所述第一输送带的一侧,所述定位爪设于所述定位旋转气缸上,并由所述定位旋转气缸驱动所述定位爪运行,所述定位块设于所述第一输送带的另一侧,所述定位块与所述定位爪配合形成所述大样品杯的定位点;
10.所述升降/移动机构包括垂直导轨、垂直拖板、水平导轨和水平拖板,所述垂直导轨设于所述第一输送带的另一侧,所述垂直拖板设于所述垂直导轨上,并沿所述垂直导轨作垂直向移动,所述水平导轨设于所述垂直拖板上,所述水平拖板设于所述水平导轨上,并沿所述水平导轨作水平向移动;
11.所述倒样机构设于所述水平拖板上,包括用以抓取所述大样品杯的夹爪,以及用以驱动所述夹爪动作的夹爪气缸、夹爪旋转气缸。
12.较佳的,所述第一输送带与所述第二输送带之间的夹角在0~90
°
之间;
13.所述第一输送带与所述第二输送带之间的垂直距离在170~190cm之间。
14.较佳的,所述升降/移动机构的外部还设有外壳。
15.较佳的,所述小样品杯的杯口位置设有样品斗。
16.较佳的,所述第一输送带、所述第二输送带均由输送带电机驱动运行;
17.所述垂直拖板通过垂直升降电机驱动升降传动带,再由升降传动带带动所述垂直拖板沿所述垂直导轨作垂直向移动;
18.所述水平拖板由水平气缸驱动沿所述水平导轨作水平向移动。
19.较佳的,所述大样品杯采用不锈钢材质制成,其尺寸为φ80
×
70mm;
20.所述小样品杯的尺寸为φ50
×
50mm。
21.本实用新型所提供的一种实验室用升降倒样机,解决了实验室自动化中对样品进行传输时,需要传输至不同位置,特别是上下有一定距离传输要求的问题。本实用新型针对直线输送机相互在不同高度和角度的这种生产架构开发,经生产使用,效果良好,与输送机组态方便。降低了成本,节约了装置使用的空间。
附图说明
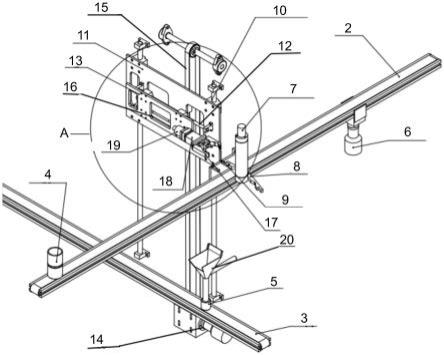
22.图1是本实用新型实验室用升降倒样机的轴视示意图;
23.图2是本实用新型实验室用升降倒样机中输送机构、定位机构、升降/移动机构和倒样机构的结构示意图;
24.图3是图2中a部分的放大示意图;
25.图4是本实用新型实验室用升降倒样机中垂直升降电机驱动垂直拖板的示意图。
具体实施方式
26.为了能更好地理解本实用新型的上述技术方案,下面结合附图和实施例进一步说明本实用新型的技术方案。
27.结合图1至图4所示,本实用新型所提供的一种实验室用升降倒样机,包括电气控制箱1、输送机构、定位机构、升降/移动机构和倒样机构。
28.电气控制箱1用以控制输送机构、定位机构、升降/移动机构和倒样机构的运行动作。
29.输送机构包括第一输送带2和第二输送带3,第一输送带2位于第二输送带3的上方,且第一输送带2与第二输送带3之间形成夹角,第一输送带2上具有大样品杯4,第二输送带3上具有小样品杯5,小样品杯5的杯口位置设有样品斗20。
30.第一输送带2与第二输送带3之间的夹角在0~90
°
之间,夹角可以根据现场的要求进行调整。
31.第一输送带2与第二输送带3之间的垂直距离在170~190cm之间,一般设置在180cm左右。
32.第一输送带2由输送带电机6驱动运行,第一输送带2可以根据大样品杯4放置的不同方向进行输送方向调整。
33.定位机构包括定位旋转气缸7、定位爪8和定位块9,定位旋转气缸7设于第一输送带2的一侧,定位爪8设于定位旋转气缸7上,并由定位旋转气缸7驱动定位爪8运行,定位块9设于第一输送带2的另一侧。
34.定位旋转气缸7根据第一输送带2的运动方向,定位旋转气缸7带动定位爪8进行
180
°
旋转,搭扣在定位块9上,使定位块9与定位爪8配合形成大样品杯4的定位点。
35.升降/移动机构包括垂直导轨10、垂直拖板11、水平导轨12和水平拖板13,垂直导轨10设于第一输送带2的另一侧(与定位块9同侧),垂直拖板11设于垂直导轨10上,并沿垂直导轨10作垂直向移动,水平导轨12设于垂直拖板11上,水平拖板13设于水平导轨12上,并沿水平导轨12作水平向移动。
36.垂直拖板11通过垂直升降电机14驱动升降传动带15,再由升降传动带15带动垂直拖板11沿垂直导轨10作垂直向移动。
37.垂直升降电机14位于垂直导轨10的底端位置,垂直升降电机14的驱动轴22上连有同步轮23,在垂直导轨10的顶端位置也设有一个同步轮,升降传动带15套在两个同步轮上并与同步轮啮合,升降传动带15的外侧面上设有一个用以安装垂直拖板11的连接块24。
38.水平拖板13由水平气缸16驱动沿水平导轨作水平向移动。
39.倒样机构设于水平拖板13上,包括用以抓取大样品杯4的夹爪17,以及用以驱动夹爪17动作的夹爪气缸18、夹爪旋转气缸19,夹爪17与定位点位置对应。
40.大样品杯4由机械手放到第一输送带2上,第一输送带2将大样品杯4输送到定位点位置,夹爪气缸18驱动夹爪17在第一输送带2上夹住大样品杯4,垂直升降电机14驱动升降传动带15向上移动20mm,垂直拖板11也跟随向上移动,使夹爪17夹住大样品杯4离开第一输送带2后,水平气缸16向后横向移动一定距离后,然后垂直升降电机14驱动升降传动带15向下将至,使夹爪17夹住大样品杯4降至样品斗20上方的倒样点,再由夹爪旋转气缸19驱动夹爪17动作,使大样品杯4旋转180
°
,将杯中的粉状样品通过样品斗20倒入小样品杯5中,最后由第二输送带3将小样品杯5输送到制备设备进行制样。
41.升降/移动机构的外部还设有用以防尘、保护的外壳21。
42.大样品杯4采用不锈钢材质制成,其尺寸为φ80
×
70mm;
43.小样品杯5的尺寸为φ50
×
50mm。
44.综上所述,本实用新型实验室用升降倒样机针对现有直线输送机相互在不同高度和角度的这种生产架构上进行改进,与各方向输送机组合方便,节约空间和成本。
45.本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本实用新型,而并非用作为对本实用新型的限定,只要在本实用新型的实质精神范围内,对以上所述实施例的变化、变型都将落在本实用新型的权利要求书范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。