1.本发明涉及无人驾驶教育技术领域,特别涉及一种基于电容触控的无人驾驶教具。
背景技术:
2.目前无人驾驶教具的设计思路主要集中于采用摄像头、超声波雷达等车载传感器实现环境感知和车辆定位。
3.公开号为cn110534009a的中国专利公开了一种人工智能无人驾驶课程教具,模拟真实无人驾驶场景,帮助学生理解图像识别中深度学习算法的基本原理,能方便教师的教学与学生理解、运用,实现了对地图数据的采集、训练和测试,能沿地图设置路线自动行驶。
4.公开号为cn209103668u的中国专利公开了一种无人驾驶车的演示教具,通过设置结构板、主车轮、电动马达、直流电源箱、辅车轮、信息传输模块、超声波传感器以及主控器,解决了现阶段的无人驾驶车演示教具在使用时的演示效果差,带入性低以及不能辅助学生很好理解其工作原理的问题。
5.公开号为cn212966762u的中国专利公开了一种基于深度学习的无人驾驶教具套件,将无人驾驶系统与无人驾驶小车本体相结合,可以让低年龄段用户群体或非领域相关人士能够对人工智能和无人驾驶有一定了解。但是上述专利存在以下缺陷:
6.首先,由于激光雷达等高精度定位设备尚未微型化,基于摄像头、超声波雷达等传感设备的感知与定位技术精度较低,难以实现高精度的定位;
7.其次,基于摄像头等传感设备的定位技术需要匹配环境特征,现有无人驾驶教具通常只能实现循迹等功能,无法实现全局定位,进而无法实现全局路径规划、路径跟踪等技术的教学与研究。
8.总而言之,目前的无人驾驶教具存在定位精度低、无法全局定位、无法实现全局路径规划和路径跟踪等问题。
技术实现要素:
9.本发明的目的在于提供一种基于电容触控的无人驾驶教具,可实现高精度定位及全局定位,可实现全局路径规划、路径跟踪等技术的教学与研究,以解决上述背景技术中提出的问题。
10.为实现上述目的,本发明提供如下技术方案:
11.一种基于电容触控的无人驾驶教具,包括基于电容触控的无人驾驶教具技术框架、带有触控笔的无人驾驶车辆模型及场外遥控计算机,基于电容触控的无人驾驶教具技术框架为塑料场地底板,所述塑料场地底板的上表面敷有电容触控薄膜,所述电容触控薄膜连接场外遥控计算机,所述场外遥控计算机通过无线网络与带有触控笔的无人驾驶车辆模型进行通信。
12.进一步地,所述带有触控笔的无人驾驶车辆模型包括无人驾驶车体,所述无人驾
驶车体的底部安装有触控笔,所述触控笔垂直安装在无人驾驶车体上,且触控笔与电容触控薄膜接触,所述触控笔上套有弹簧,所述弹簧的一端连接在无人驾驶车体上,所述弹簧的另一端连接在触控笔的笔尖上。
13.进一步地,所述无人驾驶车体的前端设置有转向行驶机构,所述转向行驶机构包括支撑固定架、转向电机、传动丝杆、横向滑块、联动基板和导向凸形座,所述支撑固定架安装在无人驾驶车体前端的底部,所述支撑固定架上设置有传动丝杆,所述传动丝杆通过轴承安装在支撑固定架上,且传动丝杆通过转向电机驱动旋转,所述转向电机安装在支撑固定架的外侧端面上,所述传动丝杆螺纹连接有横向滑块,所述横向滑块连接在联动基板上,所述联动基板上设置有导向凸形座,所述导向凸形座嵌在无人驾驶车体前端的内侧,所述无人驾驶车体前端的底部设置有供导向凸形座横向移动的导向滑槽,所述导向凸形座和导向滑槽适配。
14.进一步地,所述转向行驶机构还包括传动齿条、转向齿轮、转向轴杆、转向基座、支撑轴杆和前轮,所述联动基板的两端均设置有传动齿条,所述传动齿条和转向齿轮啮合,所述转向齿轮通过花键安装在转向轴杆上,所述转向轴杆通过轴承安装在无人驾驶车体前端,且转向轴杆的下端连接在转向基座上,所述转向基座的内侧设置有前轮,所述前轮安装在支撑轴杆上,所述支撑轴杆的两端均安装在转向基座上。
15.进一步地,所述无人驾驶车体的后端设置有驱动行驶机构,所述驱动行驶机构包括支撑支座、驱动电机、传动皮带、驱动轴杆、后轮和支撑基座,所述支撑支座安装在无人驾驶车体后端的底部,所述支撑支座上安装有驱动电机,所述驱动电机的输出轴通过传动皮带和皮带轮连接有驱动轴杆,所述驱动轴杆的两端均安装有后轮,且驱动轴杆安装在支撑基座上,所述支撑基座安装在无人驾驶车体后端的底部。
16.进一步地,所述无人驾驶车体的顶部设置有主控器,所述主控器内设置有能够接受无线信号的通信系统,且主控器通过通信系统接收场外遥控计算机发送的控制信号,然后主控器将控制信号传递给转向电机和驱动电机。
17.进一步地,所述场外遥控计算机的信号输入设备包括电容触控薄膜、键盘和鼠标,电容触控薄膜的原理与手机触摸屏一致,即通过电容导通产生的电流信号实现对触控点的定位,所述场外遥控计算机的信号输出设备即无线信号发射系统,所述场外遥控计算机的核心软件包含定位算法、路径规划算法及路径跟踪算法,其中定位算法即触控点定位算法,路径规划算法即在人工输入起点、目标点和虚拟障碍物后,规划从起点到目标点的参考路径的算法,也可以直接由人工输入参考路径,路径跟踪算法即在得到定位信息和参考路径后,解算控制信号的算法。
18.进一步地,所述触控笔与电容触控薄膜接触,使与电容触控薄膜连接的场外遥控计算机能够解算出触控笔所在的位置,该位置即为无人驾驶车辆模型在电容触控薄膜上构成的塑料场地底板上的全局位置,其中场外遥控计算机根据该位置和参考路径,解算出跟踪参考路径所需的控制信号,并通过蓝牙等无线通信手段,将控制信号发送给无人驾驶车辆模型,无人驾驶车辆模型执行控制信号,即可模拟无人驾驶系统运行。
19.进一步地,所述所述触控笔与电容触控薄膜在每一个时刻的接触点仅有一个,仅直接读取该接触点的位置信号仅能获取无人驾驶车辆模型的位置信号,而无法获取无人驾驶车辆模型的航向信号,航向信号也是一些路径跟踪控制方法的关键状态量,因此在此提
供一种基于历史接触点的航向估计方法;
20.取当前采样时刻的位置信号,上一次采样时刻的位置信号和上一次采样时刻的位置信号,并记为p1(x1,y1)、p2(x2,y2)和p3(x3,y3);
21.假设无人驾驶车辆模型符合非完整约束条件,而且考虑到采样间隔时间较短,可以假设三个相邻的采样点之间无人驾驶车辆模型的行驶速度不变,因此可以认为上述三个位置点在同一条圆弧上,
22.设三个点均在如下圆弧上:
23.x2 y2 ax by c=0
24.将三个位置点代入上式,可以求解参数a、b和c的值,圆心的位置即(-a/2,-b/2);
25.当前位置点的航向,即当前位置点在上述圆弧上的切线的方向,由于已知圆心和切点,可以求得切线方程为:
[0026][0027]
由于当y1=-b/2时,上式不存在,所以航向角可以估计为:
[0028][0029]
考虑到存在不同航向角的正切值相同的情况,且无人驾驶车辆模型的航向应该连续变化,因此可以利用上一时刻的航向角对当前航向角进行校正:
[0030][0031]
其中表示上一时刻航向角;
[0032]
考虑到无人驾驶车辆模型可能进行圆周行驶,因此上述校正过程可以循环进行:
[0033][0034]
直到满足
[0035]
与现有技术相比,本发明的有益效果是:
[0036]
1、本发明的基于电容触控的无人驾驶教具,触控笔与电容触控薄膜接触,使与电容触控薄膜连接的场外遥控计算机能够解算出触控笔所在的位置,该位置即为无人驾驶车辆模型在电容触控薄膜上构成的塑料场地底板上的全局位置,其中场外遥控计算机根据该位置和参考路径,解算出跟踪参考路径所需的控制信号,并通过蓝牙等无线通信手段,将控制信号发送给无人驾驶车辆模型,无人驾驶车辆模型执行控制信号,即可模拟无人驾驶系统运行,可实现高精度定位及全局定位。
[0037]
2、本发明的基于电容触控的无人驾驶教具,场外遥控计算机的核心软件包含定位算法、路径规划算法及路径跟踪算法,其中定位算法即触控点定位算法,路径规划算法即在人工输入起点、目标点和虚拟障碍物后,规划从起点到目标点的参考路径的算法,也可以直接由人工输入参考路径,路径跟踪算法即在得到定位信息和参考路径后,解算控制信号的算法,路径规划算法和路径跟踪算法接口开放,以便于产品用户进行二次开发,路径规划算法的输入接口在此明确为起点、目标点和虚拟障碍物的位置信息,路径跟踪算法的输入接口为呈离散点列状态的参考路径和无人驾驶车辆模型的位置姿态信息,参考路径可以由路径规划算法给出,也可以由人工输入,位置姿态信息由电容触控薄膜和场外遥控计算机求解获得,可实现全局路径规划、路径跟踪等技术的教学与研究。
附图说明
[0038]
图1为本发明的基于电容触控的无人驾驶教具涉及方法的流程示意图;
[0039]
图2为本发明的基于电容触控的无人驾驶教具的示意图;
[0040]
图3为本发明的基于电容触控的无人驾驶教具的结构图;
[0041]
图4为本发明的无人驾驶车辆模型的俯视图;
[0042]
图5为本发明的无人驾驶车辆模型的仰视图;
[0043]
图6为本发明的转向行驶机构的仰视放大图;
[0044]
图7为本发明的无人驾驶车体上设置转向行驶机构的局部示意图;
[0045]
图8为本发明的转向行驶机构的示意图;
[0046]
图9为本发明的驱动行驶机构的局部放大图。
[0047]
图中:1、塑料场地底板;11、电容触控薄膜;2、无人驾驶车体;21、触控笔;211、弹簧;22、转向行驶机构;221、支撑固定架;222、转向电机;223、传动丝杆;224、横向滑块;225、联动基板;226、导向凸形座;227、传动齿条;228、转向齿轮;229、转向轴杆;2210、转向基座;2211、支撑轴杆;2212、前轮;23、驱动行驶机构;231、支撑支座;232、驱动电机;233、传动皮带;234、驱动轴杆;235、后轮;236、支撑基座;24、主控器。
具体实施方式
[0048]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0049]
为了解决现有的无人驾驶教具存在定位精度低、无法全局定位、无法实现全局路径规划和路径跟踪的技术问题,请参阅图1-图9,本实施例提供以下技术方案:
[0050]
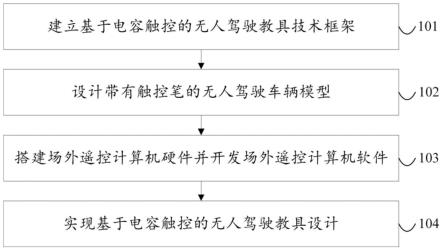
一种基于电容触控的无人驾驶教具的设计方法包括:
[0051]
s101:建立基于电容触控的无人驾驶教具技术框架;
[0052]
s102:设计带有触控笔的无人驾驶车辆模型;
[0053]
s103:搭建场外遥控计算机硬件并开发场外遥控计算机软件;
[0054]
s104:实现基于电容触控的无人驾驶教具设计。
[0055]
基于电容触控的无人驾驶教具技术框架为塑料场地底板1,塑料场地底板1的上表
面敷有电容触控薄膜11,电容触控薄膜11连接场外遥控计算机,场外遥控计算机通过无线网络与带有触控笔的无人驾驶车辆模型进行通信。
[0056]
需要说明的是,塑料场地底板1的面积为数平方米至数十平方米。
[0057]
带有触控笔的无人驾驶车辆模型包括无人驾驶车体2,无人驾驶车体2的底部安装有触控笔21,触控笔21垂直安装在无人驾驶车体2上,且触控笔21与电容触控薄膜11接触,触控笔21上套有弹簧211,弹簧211的一端连接在无人驾驶车体2上,弹簧211的另一端连接在触控笔21的笔尖上。
[0058]
需要说明的是,触控笔21的笔尖通过弹簧211推动,与电容触控薄膜11接触。
[0059]
无人驾驶车体2的前端设置有转向行驶机构22,转向行驶机构22包括支撑固定架221、转向电机222、传动丝杆223、横向滑块224、联动基板225和导向凸形座226,支撑固定架221安装在无人驾驶车体2前端的底部,支撑固定架221上设置有传动丝杆223,传动丝杆223通过轴承安装在支撑固定架221上,且传动丝杆223通过转向电机222驱动旋转,转向电机222安装在支撑固定架221的外侧端面上,传动丝杆223螺纹连接有横向滑块224,横向滑块224连接在联动基板225上,联动基板225上设置有导向凸形座226,导向凸形座226嵌在无人驾驶车体2前端的内侧,无人驾驶车体2前端的底部设置有供导向凸形座226横向移动的导向滑槽,导向凸形座226和导向滑槽适配。
[0060]
转向行驶机构22还包括传动齿条227、转向齿轮228、转向轴杆229、转向基座2210、支撑轴杆2211和前轮2212,联动基板225的两端均设置有传动齿条227,传动齿条227和转向齿轮228啮合,转向齿轮228通过花键安装在转向轴杆229上,转向轴杆229通过轴承安装在无人驾驶车体2前端,且转向轴杆229的下端连接在转向基座2210上,转向基座2210的内侧设置有前轮2212,前轮2212安装在支撑轴杆2211上,支撑轴杆2211的两端均安装在转向基座2210上。
[0061]
需要说明的是,转向电机222启动,转向电机222带动传动丝杆223旋转,由于传动丝杆223螺纹连接有横向滑块224,因此传动丝杆223在旋转的过程中可带动横向滑块224和联动基板225在导向凸形座226的导向作用下横向移动,联动基板225横向移动可带动传动齿条227也横向移动,由于传动齿条227和转向齿轮228啮合,因此传动齿条227在横向移动的过程中可带动转向齿轮228、转向轴杆229和转向基座2210在无人驾驶车体2前端转动,转向基座2210转动可使支撑轴杆2211和前轮2212也随之转动,使前轮2212调整转动方向,直到前轮2212转向至合适的位置处。
[0062]
无人驾驶车体2的后端设置有驱动行驶机构23,驱动行驶机构23包括支撑支座231、驱动电机232、传动皮带233、驱动轴杆234、后轮235和支撑基座236,支撑支座231安装在无人驾驶车体2后端的底部,支撑支座231上安装有驱动电机232,驱动电机232的输出轴通过传动皮带233和皮带轮连接有驱动轴杆234,驱动轴杆234的两端均安装有后轮235,且驱动轴杆234安装在支撑基座236上,支撑基座236安装在无人驾驶车体2后端的底部。
[0063]
需要说明的是,驱动电机232启动,驱动电机232带动传动皮带233和驱动轴杆234旋转,驱动轴杆234旋转可带动后轮235旋转,使后轮235驱动无人驾驶车体2行驶。
[0064]
无人驾驶车体2的顶部设置有主控器24,主控器24内设置有能够接受无线信号的通信系统,且主控器24通过通信系统接收场外遥控计算机发送的控制信号,然后主控器24将控制信号传递给转向电机222和驱动电机232。
[0065]
场外遥控计算机的信号输入设备包括电容触控薄膜11、键盘和鼠标,电容触控薄膜11的原理与手机触摸屏一致,即通过电容导通产生的电流信号实现对触控点的定位,场外遥控计算机的信号输出设备即无线信号发射系统,场外遥控计算机的核心软件包含定位算法、路径规划算法及路径跟踪算法,其中定位算法即触控点定位算法,路径规划算法即在人工输入起点、目标点和虚拟障碍物后,规划从起点到目标点的参考路径的算法,也可以直接由人工输入参考路径,路径跟踪算法即在得到定位信息和参考路径后,解算控制信号的算法。
[0066]
需要说明的是,路径规划算法和路径跟踪算法接口开放,以便于产品用户进行二次开发,路径规划算法的输入接口在此明确为起点、目标点和虚拟障碍物的位置信息,路径跟踪算法的输入接口为呈离散点列状态的参考路径和无人驾驶车辆模型的位置姿态信息,参考路径可以由路径规划算法给出,也可以由人工输入,位置姿态信息由电容触控薄膜11和场外遥控计算机求解获得。
[0067]
触控笔21与电容触控薄膜11接触,使与电容触控薄膜11连接的场外遥控计算机能够解算出触控笔21所在的位置,该位置即为无人驾驶车辆模型在电容触控薄膜11上构成的塑料场地底板1上的全局位置,其中场外遥控计算机根据该位置和参考路径,解算出跟踪参考路径所需的控制信号,并通过蓝牙等无线通信手段,将控制信号发送给无人驾驶车辆模型,无人驾驶车辆模型执行控制信号,即可模拟无人驾驶系统运行。
[0068]
触控笔21与电容触控薄膜11在每一个时刻的接触点仅有一个,仅直接读取该接触点的位置信号仅能获取无人驾驶车辆模型的位置信号,而无法获取无人驾驶车辆模型的航向信号,航向信号也是一些路径跟踪控制方法的关键状态量,因此在此提供一种基于历史接触点的航向估计方法;
[0069]
取当前采样时刻的位置信号,上一次采样时刻的位置信号和上一次采样时刻的位置信号,并记为p1(x1,y1)、p2(x2,y2)和p3(x3,y3);
[0070]
假设无人驾驶车辆模型符合非完整约束条件,而且考虑到采样间隔时间较短,可以假设三个相邻的采样点之间无人驾驶车辆模型的行驶速度不变,因此可以认为上述三个位置点在同一条圆弧上,
[0071]
设三个点均在如下圆弧上:
[0072]
x2 y2 ax by c=0
[0073]
将三个位置点代入上式,可以求解参数a、b和c的值,圆心的位置即(-a/2,-b/2);
[0074]
当前位置点的航向,即当前位置点在上述圆弧上的切线的方向,由于已知圆心和切点,可以求得切线方程为:
[0075][0076]
由于当y1=-b/2时,上式不存在,所以航向角可以估计为:
[0077][0078]
考虑到存在不同航向角的正切值相同的情况,且无人驾驶车辆模型的航向应该连续变化,因此可以利用上一时刻的航向角对当前航向角进行校正:
[0079][0080]
其中表示上一时刻航向角;
[0081]
考虑到无人驾驶车辆模型可能进行圆周行驶,因此上述校正过程可以循环进行:
[0082][0083]
直到满足
[0084]
综上,本发明的基于电容触控的无人驾驶教具,触控笔21与电容触控薄膜11接触,使与电容触控薄膜11连接的场外遥控计算机能够解算出触控笔21所在的位置,该位置即为无人驾驶车辆模型在电容触控薄膜11上构成的塑料场地底板1上的全局位置,其中场外遥控计算机根据该位置和参考路径,解算出跟踪参考路径所需的控制信号,并通过蓝牙等无线通信手段,将控制信号发送给无人驾驶车辆模型,无人驾驶车辆模型执行控制信号,即可模拟无人驾驶系统运行,可实现高精度定位及全局定位,场外遥控计算机的核心软件包含定位算法、路径规划算法及路径跟踪算法,其中定位算法即触控点定位算法,路径规划算法即在人工输入起点、目标点和虚拟障碍物后,规划从起点到目标点的参考路径的算法,也可以直接由人工输入参考路径,路径跟踪算法即在得到定位信息和参考路径后,解算控制信号的算法,路径规划算法和路径跟踪算法接口开放,以便于产品用户进行二次开发,路径规划算法的输入接口在此明确为起点、目标点和虚拟障碍物的位置信息,路径跟踪算法的输入接口为呈离散点列状态的参考路径和无人驾驶车辆模型的位置姿态信息,参考路径可以由路径规划算法给出,也可以由人工输入,位置姿态信息由电容触控薄膜11和场外遥控计算机求解获得,可实现全局路径规划、路径跟踪等技术的教学与研究。
[0085]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。