1.本发明涉及电机控制技术领域,具体涉及一种无位置传感器的用于永磁同步电机的转子位置估计方法。
背景技术:
2.精准的转子位置信息是永磁同步电机矢量控制系统必不可少的部分,是通过静止坐标系和旋转坐标系对电机系统进行解耦控制的关键。传统有传感器方法依赖于机械安装在电机的转子轴端的位置传感器获取转子位置,这无疑使电机本身体积增大,制造成本增加,系统的可靠度降低,无法在有限空间内使用。因此无传感控制的技术得到了愈来愈多研究和应用。目前常用的无传感器算法有低通滤波法、滑膜观测器法、模型参考自适应算法、扩展卡尔曼滤波算法、非线性磁链观测器算法等。
技术实现要素:
3.针对现有技术的至少一个缺陷或改进需求,本发明提供了一种用于永磁同步电机的转子位置估计方法。通过分析电动势混合信号中的基波部分、直流部分、高频部分,得出磁链信号与电动势混合信号的定性关系,基于二阶广义积分器(sogi)提出一种高效直接的同相滤波器,考虑到sogi输出信号中qv
′
比v
′
含有更少的高频信号但qv
′
有90度相移,设计信号调制算法消除掉90度相移,并辅以高通滤波器削弱qv
′
中的直流部分,将sogi,锁频环模块以及信号调制算法整合为一个同相滤波器,通过该同相滤波器能够完整地提取出电动势的基波部分,然后对基波信号进行积分得到磁链信号,将磁链信号送入锁相环,最终得到转子位置信号。
4.本发明所采用的技术方案是一种用于永磁同步电机的转子位置估计方法包括以下步骤:
5.s1、建立α,β轴的sogi模块,将两个轴的电动势混合信号分别送入两个sogi模块,得到带有高频部分但无直流部分的输出信号v
′
,没有高频部分但有直流部分的输出信号qv
′
,同时qv
′
带有90度相移。
6.s2、使用锁频环模块获取电角频率,该模块共计六个输入信号,分别为两个轴的电动势混合信号、两个sogi模块的输出v
′
,qv
′
信号,输出信号为电机运行的电角频率ωe。
7.s3、建立同相滤波器后级信号调制模块,该模块输入信号为sogi前级输出信号qv
′
以及电角频率ωe,经过该模块后,能够得到无高频、无直流的电动势基波信号。
8.s4、对同相滤波器的输出的电动势基波信号进行积分,得到α,β轴的磁链信号ψ
α
,ψ
β
。
9.s5、将α,β轴的磁链信号ψ
α
,ψ
β
分别减去ls*i
α,β
后送入锁相环模块,得到电机的转子位置θe。
10.本发明的有益效果是:本发明提供的永磁同步电机无位置传感器转子位置估计方法,基于分析电动势混合信号中的基波部分、直流部分、高频部分,得出磁链信号与电动势
混合信号的定性关系,使用滤波的方法剔除原电动势信号中的直流部分以及高频部分,完整地提取出基波部分,规避了直流部分和高频部分在执行积分时带给系统的误差,保证了该方法提取到的磁链信号的完整性,从而为锁相环计算转子位置提供更好的基础,为无传感器控制算法提供更精准的转子位置。
附图说明
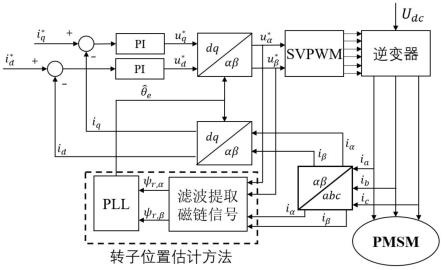
11.图1是本发明实施例提供的永磁同步电机无传感器控制系统的原理框图。
12.图2是本发明实施例提供的永磁同步无传感器转子位置估计方法的原理框图。
13.图3是本发明实施例提供的二阶广义积分器sogi原理框图。
14.图4是本发明实施例提供的锁频环原理框图。
15.图5是本发明实施例提供的信号调制算法原理框图。
16.图6是本发明实施例提供的锁相环原理框图。
17.图7是非线性磁链观测器算法提供的α,β轴磁链波形图。
18.图8是本发明实施例提供的α,β轴磁链波形图。
19.图9是非线性磁链观测器算法提供的电机角频率波形图。
20.图10是本发明实施例提供的电机角频率波形图。
21.图11是本发明实施例提供的转子位置角度观测结果波形图。
具体实施方式
22.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳的实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
23.图1是永磁同步电机无传感器控制系统的原理框图,图1中,pi表示比例积分控制器,svpwm表示空间矢量脉宽调制,pmsm表示永磁同步电机;图2是永磁同步无传感器转子位置估计方法的原理框图,图2中in phase out v
α,β
表示v
α,β
输入信号经过同相滤波器的输出;图3是二阶广义积分器(sogi)原理框图;图4是锁频环原理框图;图5为信号调制算法原理框图;图6为锁相环原理框图。图7是非线性磁链观测器算法提供的α,β轴磁链波形图;图8是本发明实施例提供的α,β轴磁链波形图;图9是非线性磁链观测器算法提供的电机角频率波形图;图10是本发明实施例提供的电机角频率波形图;图11是本发明实施例提供的转子位置角度观测结果波形图。下面结合图1、2、3、4、5、6进行说明,本实施例提供的永磁同步电机的转子位置估计方法包括以下步骤:
24.步骤1、建立永磁同步电机两相静止坐标系下的数学模型和磁链方程为,其中
″
·
″
表示导数:
25.[0026][0027][0028]
其中u
α
,u
β
,i
α
,i
β
分别为α,β轴的电压与电流,ls为d,q轴电感,ψ
α
,ψ
β
为α,β轴磁链,ψf为永磁体磁链,ωe表示电角频率,θe表示电机的转子位置角度。联立方程可得:
[0029][0030]
等号中间为带有基波部分、直流部分、高频部分的混合信号,数学模型为:
[0031]vα,β
=a0 a1sin(ωet θ) ahsin(hωet θh),其中a0,a1,ah表示直流部分、基波部分、高频部分的幅值,h表示谐波次数
[0032]
步骤2、使用sogi和信号调制算法组成的同相滤波器对其进行滤波。根据图3得sogi传递函数为:
[0033][0034][0035]
其中k
sogi
为系数,得到u
′
=a
1 sin(ωt θ) ahsin(hωt θh),qv
′
=a0 a
1 cos(ωt θ)
[0036]
步骤3、将六个信号v
α,β
,v
′
α,β
,qv
′
α,β
送入锁频环,得到误差ε
α,β
传递函数为:
[0037][0038]
误差ε
α,β
与qv
′
α,β
相乘进行计算,用于跟踪输入频率ωe。当输出频率小于输入频率时,同相位,乘积为正,否则为相反相位,乘积为负,然后通过一个负增益系数τ控制系统输出频率趋近于输入频率ωe[0039]
步骤4、为了得到完整的基波,设计出信号调制算法,将不含高频qv
′
信号中基波部分的a1cos(ωt θ)转变为a1sin(ωt θ),信号调制算法结构框图如图3所示,得到其传递函数为:。
[0040][0041]
其中kc为系数,v
″
=a0 a
1 sin(ωt θ)为经过调制后的输出信号,可以推导出传递函数为:
[0042][0043]
则同相滤波器传递函数为
[0044][0045]
其中ω0为高通滤波器截止频率,v
″
经过高通滤波器输出为
[0046]
in phase out=a
1 sin(ωt θ)
[0047]
步骤5、根据步骤1中的公式将in phase out与ls*i
α,β
作差,把得到的输出ψ
r,α
和ψ
r,β
送入锁相环模块进行计算。最终得到转子的估计位置
[0048]
本发明提供的永磁同步电机的转子位置估计方法适用于中高低速运行,不适用于超低速运行。为了进一步验证本发明专利的优越性和实际效果,将本发明专利与非线性磁链观测算法进行结果对比,当在时间为1秒时给电机系统iq输入信号,电机角频率迅速升至900rad/s,结果如图7、8、9、10所示:
[0049]
图7、9分别是非线性磁链观测器算法提供的α,β轴磁链波形图和电机角频率波形图,由图7所示非线性磁链观测器算法的α,β轴磁链结果α轴磁链有些许直流偏移,图9所示电机角频率过程中抖振较大并且在系统趋于稳定时角频率波形仍有可见纹波。图8、10、11分别是本发明提供的α,β轴磁链波形图、电机角频率波形图和转子位置实际、观测值结果图。由图8所示本发明专利α,β轴磁链结果峰值平整,没有直流偏移;由图10所示本发明专利电机角频率波形平滑,且在上升及稳态时抖振及纹波很小。由对比图可知,本发明能够准确的观测出永磁同步电机的转子位置,同时更精准地得到了电机磁链的准确度,降低了系统角频率变化的纹波,大大削减了系统的抖振,提高了系统的稳定性。
[0050]
本领域技术人员容易理解,以上所述仅为本发明的角较佳实施例,并不用以限制本发明。任何熟悉此技术的人士皆不可在违背本发明的精神及范畴下,对上述实施例进行任何修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。