设备取向传感器
附图说明
1.各附图解说了本文中所传达的诸概念的实现。所解说的实现的特征可通过参考以下结合附图的描述来更容易地理解。在可行的情况下,各附图中相同的附图标记被用来指代相同的元件。此外,每一附图标记的最左边的数字传达其中首次引入该附图标记的附图及相关联的讨论。在空间允许的情况下,为方便读者,元件及其相关联的附图标记两者都被显示在绘图页面上。否则,仅附图标记被示出。
2.图1a-1c、4a-4f、5a、5b和7-10示出了根据取向感测概念的一些实现的示例设备的透视图。
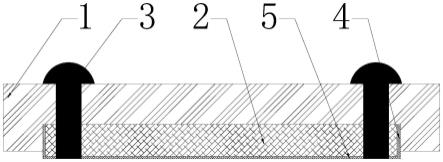
3.图2a-2c和3a-3d示出了根据取向感测概念的一些实现的示例设备的截面视图。
4.图6a示出根据取向感测概念的一些实现的示例设备的分解透视图。
5.图6b示出根据取向感测概念的一些实现的示例设备的立面视图。
具体实施方式
6.本概念涉及用于诸如具有可旋转部分和/或附件的计算设备之类的设备的位置或取向传感器。这些设备可以在一个或多个尺寸(例如厚度)上受到约束。传感器可被实现成霍尔效应传感器和由霍尔效应传感器感测的细长磁体组。霍尔效应传感器和磁体组的布置可以允许定位在缺少用于传统传感器配置的空间的尺寸受约束的设备中,同时还提供比传统传感器配置更多的取向数据。
7.介绍:图1a-1c共同示出了系统100,其可以包括具有第一部分104和第二部分106的可折叠计算设备形式的示例设备102。第一部分和第二部可以通过铰链组装件108被可旋转地紧固。铰链组装件108可以限定一个或多个旋转轴或铰链轴(ha)。铰链组装件108可促进第一部分104和第二部分106在一定范围内旋转。在这一情形中,旋转范围包括360度旋转(例如,从图1a的零度取向(其中第一部分位于第二部分的顶部并抵靠第二部分定位),通过图1b的180度并排取向,经过图1c的355度定向,到360度定向(其中,第一部分在第二部分下方并抵靠第二部分)。例如,其他实现可具有不同的旋转范围,诸如零度至180度的旋转范围。
8.第一部分104和第二部分106可以包括壳体或底座110,并且可以限定第一主表面112和第二主表面114(例如,前表面和后表面)。在该实现中,第一部分104和第二部分106的厚度在z参考方向上受到约束。此外,许多设备组件,诸如显示器、处理器、电池、热管等,都在竞争该厚度。在这一情形中,设备102还可以包括高度受约束的传感器组装件116,其可以装配在第一部分104和第二部分106的厚度约束内。
9.高度受约束的传感器组装件116可以感测第一部分104和第二部分106的相对取向,同时符合该有限空间。例如,高度受约束的传感器组装件116可以将图1a的零度取向、图1b的180度取向和图1c的355度取向彼此区分开来。图2a-2c是如图1a-1c所示的截面图,并且共同示出了示例高度受约束的传感器组装件116的附加细节。在这一情形中,高度受约束的传感器组装件116包括位于第一部分104中的霍尔效应传感器202和位于第二部分106中
的磁体阵列204。注意,定位可以反过来,其中磁体阵列204在第一部分中而霍尔效应传感器202在第二部分中。霍尔效应传感器202可被配置成感测沿感测轴(sa)的磁场。在这一情形中,霍尔效应传感器被取向成使得感测轴垂直于第一部分104的第一表面112(1)和第二表面114(1)。这一配置可以允许霍尔效应传感器202具有小于第一部分104厚度t1的高度h1。在这一实现中,磁体阵列204包括第一和第二细长磁体206。细长磁体可以限定延伸穿过其北极和南极的长轴(la)。在这一情形中,长轴基本上平行并且彼此同轴布置,并且平行于第二部分的主表面112(2)和114(2)。如本文所使用的,例如,“基本平行”可以定义成细长磁体的诸长轴平行或在十度内平行。该磁体配置可允许磁体206被安装在比先前配置更受约束的高度h2中,其中磁体垂直于第一和第二表面112(2)和114(2)对齐,例如长轴垂直于第一和第二表面。换言之,具有彼此同轴并布置成平行于第一和第二表面112(2)和1144(2)的长轴和磁轴的相对磁体206可以允许磁体阵列204具有小于第二部分106的厚度t2的高度h2。
10.本实现的磁体配置还可以实现霍尔效应传感器202进行的、比传统磁体配置能获得的更具确定性的感测,其中在第一和第二部分彼此抵靠定位时(诸如在零度取向和/或360度取向),磁场的长轴平行于感测轴。下文相关于图3a-3d更详细地讨论这些方面。
11.在所示配置中,磁体206在横向上间隔开的距离等于霍尔效应传感器202的宽度w。在这一情形中,该距离由空气形式的居间材料208占据,但也可以使用其他居间材料。在下面相关于图5a和5b的讨论中描述了其他示例。在其他实现中,磁体206可以比图2a-2c所示的配置间隔得更近或更远。
12.在所示配置中,磁体206的北极彼此面对。在其他实现中,南极可彼此面对。此外,所示实现采用两个同轴磁体206(1)和206(2)相隔180度定位。其他实现可以在磁体阵列204中使用更多磁体。例如,一些实现可以使用四个磁体(例如,一个位于磁体206(2)的左侧并且取向与磁体206(2)相同,且一个在磁体206(1)的右侧并且取向与磁体206(1)相同)。相关于图8解说了一个此类示例。另一实现可以利用磁体和磁性阵列中的另一材料。例如,磁体206(2)可以与另一材料配对,诸如替代磁体206(1)的金属块或金属棒。相关于图10解说了一个此类示例。其他实现可以与所示的180度取向不同地布置磁阵列。例如,磁体阵列可以包括在平行于第一表面112(2)的平面中相隔120度布置的三个磁体206。每一磁体可以具有面向内的相同磁极(例如,全北极或全南极)。类似地,磁体阵列204可以包括在每一磁体206之间以90度布置的四个磁体。相关于图9解说了一个此类示例。
13.图3a-3d共同示出了当前的取向感测概念如何能够提供比先前的解决方案更有意义的旋转取向数据,同时在设备内占据比先前方案更少的高度。
14.图3a示出了设备102的第一部分104和第二部分106接近零度取向,其中霍尔效应传感器202直接位于磁体阵列204上方(例如,第一部分104在第二部分106上方)。在这一情形中,磁体206(1)和206(2)的北极在物理上彼此面对。磁体206的磁场(例如,磁场线)302也彼此相对(例如,彼此相互作用)。出于解释的目的,两个磁场302的这种相反的相互作用可以被视为产生与磁场302中的任一者孤立不同的集体磁场(cmf)304。集体磁场304可以产生与第一表面112(2)和第二表面114(2)以及磁体的长轴成直角地远离磁体阵列204延伸的磁通量。
15.注意,霍尔效应传感器202对通量的方向性敏感,并且因此当通量从图3d的顶部到底部和图3a的底部到顶部通过霍尔效应传感器时可以生成不同输出。换言之,磁体阵列204
所生成的穿过主表面112(2)的极性不同于穿过主表面114(2)的极性。当受到这两种不同的极性时,霍尔效应传感器202可对不同的输出敏感并产生不同的输出。这些方面将在下面的解释中加以利用。
16.集体磁场304部分地延伸出主表面112(2)和114(2),并与主表面成直角。在图3a中,集体磁场304与霍尔效应传感器202的感测轴(sa)共延,在该零度取向中,霍尔效应传感器直接位于磁体阵列204的上方。在这一取向中,将沿霍尔效应传感器202的感测轴感测集体磁场304。该感测将使得霍尔效应传感器204产生可决定器件取向的输出电压。例如,输出电压可以被映射到已知取向和相关联输出电压的列表或映射表。例如,可以在特定模型的设备上执行测试,以确定在所定义的取向上的输出电压。该映射可以提供与设备部分的所定义取向相关的输出电压和/或与接近高度受约束的传感器组装件的设备部分之间的所定义距离相关的输出电压。这些值可被用于填充映射表。映射表可被存储在该模型的设备上,并且可以由设备实时访问,诸如通信耦合以接收来自高度受约束的传感器组装件的输出电压的处理器或控制器。
17.图3b示出了旋转到大约60度取向(例如,从图3a的闭合取向旋转60度)的第一部分104和第二部分106。此时,由磁体206生成的集体磁场304距感测轴太远和/或与感测轴成错误的角度(例如,与感测轴不同轴),并且因此霍尔效应传感器202没有充分感测到集体磁场304以产生输出电压。该空(null)输出电压可以确定取向。例如,空输出电压可以被映射成不定角度(例如,不是零度(或在接近零度的范围内)取向并且不是360度(或者在接近360度的范围中)取向)。
18.图3c示出了旋转到大约180度取向(例如,从图3a的闭合取向旋转180度)的第一部分104和第二部分106。此时,集体磁场304距感测轴太远,并且因此霍尔效应传感器202没有感测到足以产生输出电压的磁场。该空(null)输出电压可以确定取向。例如,空输出电压可以被映射成不定角度(例如,不是零度(或在接近零度的范围内)取向并且不是360度(或者在接近360度的范围中)取向)。
19.图3d示出了设备102的第一部分104和第二部分106接近360度取向(例如,相对于图3a的零度取向旋转360度),其中霍尔效应传感器202直接位于磁体阵列204下方(例如,第一部分104在第二部分106上方)。在该取向中,集体磁场304与霍尔效应传感器的感测轴对准,但处于与图3a的零度取向相反的方向。
20.集体磁场304可由霍尔效应传感器202感测,并使霍尔效应传感器生成输出电压vh。该输出电压确定第一部分104和第二部分106的取向。例如,该输出电压可被映射到360度取向或包括360度的小取向范围,诸如355-360度的范围)。换言之,在该360度取向处的输出电压不同于在包括所示的零度取向、60度取向和180度取向的其他取向处的电压。
21.作为对比,传统的磁体和霍尔效应传感器配置不会在一定取向范围上产生确定性的输出电压。例如,在这些先前的解决方案中,零度和360度处的输出电压是等效的,因为霍尔效应传感器感测或“看到”相同的极性,无论其在磁体上方还是下方。因此,霍尔效应传感器的输出是非确定性的,因为它不能区分零度取向和360度取向。
22.为了部分地解决传统霍尔效应传感器配置的这一非确定性缺点,有时在霍尔效应传感器上方或下方添加磁屏蔽,使得传感器仅感测一个取向的磁场(例如,当磁体位于未屏蔽侧时)。这减少了单个霍尔效应传感器可以提供的取向信息。因此,必须使用两个霍尔效
应传感器来实现类似的功能性:一个用于感测零度取向,另一个用于检测360度取向。此外,除了霍尔效应传感器的高度之外,磁屏蔽还需要厚度。如上所述,这种额外的厚度在许多厚度受约束的设备中是不可用的。因此,在本实现中,器件取向从霍尔效应传感器产生具有确定性的输出电压(例如,对于该取向是唯一的)。例如,在所示的配置中,零度取向可以产生第一输出电压,5度至355度可以产生空输出电压,而356度至360度可以产生与第一输出电压不同的第二输出电压。在一些情形中,第二输出电压可以是相等但相反的值。其他实现可以具有与在此出于解释目的而提供的输出电压不同的其他输出电压。讨论的重点是输出电压可以确定至少三个取向:闭合/几乎闭合;中间;以及完全打开/几乎完全打开。在以上示例中,几乎关闭到关闭和几乎完全打开到完全打开跨越了五度。其他实现可以覆盖其他取向范围,诸如3度、7度或10度等。
23.图4a-4g共同示出了另一示例系统100a。(后缀“a”用于指示系统100a的元件可以与上面相对于图1a-1c介绍的系统100的元件相同或不同)。在这一情形中,该系统包括经铰接设备102,经铰接设备102包括第一部分104和第二部分106。触摸显示器402位于主表面114上。
24.设备102可以与附件404交互。附件404可以实现成小键盘、键盘、触摸板(例如,轨迹板)、组合键盘和触摸板、游戏控制器、输入设备等。在这一情形中,附件404可以相对于第二部分106可移除地旋转。附件404可具有一个或多个受约束尺寸,诸如厚度t3(如图4c所示),并且因此可以称为厚度受约束的附件。
25.图4a示出了附件404相对于部分106处于收起或360度取向。图4b示出了附件相对于图4a的取向旋转了90度。图4c示出了附件相对于图4a的取向旋转了180度。图4d示出了附件相对于图4a的取向旋转了270度。图4e示出了附件相对于图4a的取向旋转了大约360度,达到抵靠显示器402(2)的展开或零度取向。图4f示出了第一部分104闭合在第二部分106上,其中附件被夹在第一和第二部分之间,并保持第一和第二部分稍微间隔开(例如357度)。
26.系统100a可以使用多个高度受约束的传感器组装件116。(注意,高度受约束的传感器组装件116以重影示出,以指示它们在这些视图中实际上不可见,因为它们可能被其他组件覆盖)。在所示实现中,采用了四个高度受约束的传感器组装件116(1)-116(4)。可以设想高度受约束的传感器组装件的其他数量和/或位置。
27.在这一情形中,高度受约束的传感器组装件116(1)和116(2)感测第一部分104和第二部分106之间的取向。在本示例中,霍尔效应传感器202位于第一部分104中,而磁体阵列204位于第二部分104中。高度受约束的传感器组装件116(1)和116(2)可以按相关于图1a-3d所描述的高度受约束的传感器组装件116相似的方式来操作,并且因此在本讨论中仅简要描述。
28.在该实现中,高度受约束的传感器组件116(1)和116(2)可以冗余地工作,以减少/避免可能由可能接近设备102的其他磁体引起的错误读数。其他磁体的示例可以包括可能在设备的操作环境中的任何磁体。例如,用户的桌子上可能有磁性回形针夹或附连到设备的磁性电源连接器。如果此类的磁体接近高度受约束的传感器组装件116(1)或116(2),则相应的霍尔效应传感器可能产生错误的输出电压。通过采用多个冗余的高度受约束的传感器组装件116,可以大大减少与这种情况相关的潜在问题。因此,如果高度受约束地传感器
组装件116(1)和116(2)没有产生相似的输出(例如,产生不同的输出电压),则输出电压可被暂时忽略并被重新采样,以及其他潜在响应。
29.以类似的方式,高度受约束的传感器组装件116(3)和116(4)可以冗余地感测附件404和第二部分106之间的相对取向。在这一示例中,霍尔效应传感器202位于第一部分106中,而磁体阵列204位于附件104中。然而,相对位置可以改变。例如,举例而言,所有四个霍尔效应传感器202可以位于第二部分106中,并且相关联的磁体阵列204可以位于第一部分104和附件404中。在图4a的取向中,高度受约束的传感器组装件116(1)和116(2)两者都可以产生指示第一部分104和第二部分106处于中间/居间取向(例如,不接近零度取向且不接近360度取向)的输出。高度受约束的传感器组装件116(3)和116(4)两者都可以产生指示第二部分106和附件404处于360度取向的输出。
30.在图4b-4d的取向中,高度受约束的传感器组装件116(1)和116(2)两者都可以产生指示第一部分104和第二部分106处于中间取向(例如,不在包括零度取向的子范围中且不在包括360度取向的另一子范围中)的输出。高度受约束的传感器组装件116(3)和116(4)两者都可以产生指示第二部分106和附件404也处于中间取向的输出。
31.在图4e的取向中,高度受约束的传感器组装件116(1)和116(2)两者都可以产生指示第一部分104和第二部分106处于中间取向(例如,不接近零度取向且不接近360度取向)的输出。高度受约束的传感器组装件116(3)和116(4)两者都可以产生指示第二部分106和附件404处于0度取向的输出。
32.在图4f的取向中,高度受约束的传感器组装件116(3)和116(4)两者都可以产生指示第二部分106和附件404处于0度取向的输出。高度受约束的传感器组装件116(1)和116(2)两者都可以产生指示第一部分104和第二部分106处于基本上闭合取向的输出。高度受约束的传感器组装件116(1)和116(2)可以足够灵敏,以通过附件404和/或通过与附件相关联的第一和第二部分之间的间隙进行感测。因此,在这一情形中,基本上闭合的取向可以包括例如从大约0-5度的取向范围,并且可以感测第一部分104和第二部分106在附件404上闭合的情形。
33.在所示的配置中,附件404与第二部分104一样宽。在宽度不同的情况下,设想了其他实现。还要注意,在这一情形中,附件设备是楔形的,以允许第一部分104和第二部分106以径向方式均匀地闭合在附件上。下面参照图5a-10描述示例铰链阵列配置。图6a和6b示出了特别适合于这种楔形配置的磁体阵列配置。
34.注意,来自高度受约束的传感器组装件116的该取向信息可被用于各种目的,诸如控制显示器402和/或附件404。例如,当来自高度受约束的传感器组装件116(1)和116(2)的输出指示设备部分处于中间位置时,如图4a所示,内容可被分散在这两个显示器402上。如果显示器在零度取向上抵靠彼此而闭合,则诸显示器可被关闭。如果显示器打开到360度取向,例如,可以在这两个显示器上复制相同的内容。类似地,当附件处于图4a的360度取向时,用户没有使用附件并且附件可以被关闭。在中间取向中,附件可以被打开并且用户输入被接受。如图4e所示,当附件处于闭合取向时,显示器402(2)的底层区域可以被停用,而附件被激活。在图4f的夹层闭合定向中,可以关闭附件并且可以关闭显示器。当然,这些只是如何利用来自高度受约束的传感器组装件的取向信息的示例,并且设想了其他实现。
35.上述控制功能性可以由各种设备元件实现。在一个配置中,控制电路系统可以接
收霍尔效应传感器的输出。控制电路系统可以被配置成至少部分地基于输出来确定设备部分是否(例如,何时)被定位在基本上打开或关闭的取向。例如,基本上打开可被定义成两个设备部分处于例如350度和360度之间的取向。类似地,基本上闭合可被定义成两个设备部分处于例如0度和10度之间的取向。作为替换或补充,基本上闭合或打开可以是距离范围,诸如接触(例如,零毫米间隔)到十毫米间隔。设想了其他角度范围和/或距离。
36.以类似的方式,控制电路系统可以基于霍尔效应传感器的输出来确定设备附件是否(例如,何时)接近设备的前(例如,第一)表面或后(例如,第二)表面。在这一情形中,“接近”可以与特定的旋转取向范围(例如,包括发生接触的度数在内的度数范围)相关。例如,接近可以意味着接触该设备(例如,附件的表面与设备的表面相邻并接触设备的表面,或者在例如接触表面的五度内)。作为替换或补充,接近可以是距离范围,诸如接触(例如,零毫米间隔)到十毫米间隔。设想了其他角度范围和/或距离。
37.控制电路系统可以被配置成至少部分地基于取向来控制一个或多个设备参数,诸如打开或关闭显示器的电源和/或在显示器上显示什么以及如何显示内容。控制电路系统可被体现在软件、硬件和/或其组合的各种实现中。例如,控制电路系统可以被实现成由设备的处理器(诸如中央处理单元cpu或图形处理单元gpu)执行的软件代码。可替换地,控制电路系统可以被实现成微控制器或其他专用和/或有限功能处理器以及其他配置。
38.图5a和5b共同示出了示例磁体阵列204b。图5a示出了由结构支架502紧固的磁体阵列。图5b示出了孤立的磁体阵列204b。在这一情形中,磁体阵列是不对称的,因为当沿它们的长轴(例如,平行于y参考轴)测量时,磁体206(1)比磁体206(2)短。相对于图2a-2c示出了对称磁体。
39.在此示例中,磁体的北极彼此面对并由居间材料208隔开。在这一情形中,居间材料是非铁金属,诸如不锈钢。可以使用其他材料,诸如塑料或泡沫。磁体206的北极彼此互斥。尽管斥力将磁体推开,但结构支架502可将磁体保持在其抵靠居间材料的位置。结构支架502可以在设备的整个寿命期间保持这种关系,而诸如粘合剂之类的其他紧固装置可能随着时间和恒定应力而减弱并允许磁体彼此远离。结构支架进而可被紧固到设备,诸如紧固到第一或第二部分或附件。例如,紧固件可被用于将结构支架紧固到壳体(110,图1)。可以采用各种材料来形成结构支架。例如,可以使用金属,诸如非铁金属。聚合物和复合物是替代材料。
40.图6a和6b共同示出了示例磁体阵列204c。图6a示出了磁体阵列204c的分解透视图。图6b示出了横向于y参考轴截取的个体磁体的截面。在这一情形中,磁体阵列204c包括磁体206(1)和206(2),它们由居间材料208分隔开并由两部分结构支架502紧固。
41.磁体阵列204c可有用于第一和第二表面彼此不平行的应用。上面参照图4a-4f的附件404描述了一个这样的示例。在这种情况下,附件是楔形的。在磁体阵列204c中,磁体206可以具有沿x参考轴的锥形厚度,以符合附件的楔形形状。具有矩形截面的磁体相关于图5a和5b示出。图6a和6b示出了梯形截面。以下关于图7描述了附加示例形状。
42.图7示出了另一示例磁体阵列204d。在这一情形中,细长磁体206(1)和206(2)通常是圆柱形并具有圆形截面。
43.图8示出了与图7的磁体阵列204d类似的另一示例磁体阵列204e。在这一情形中,磁体阵列204e包括四个串联布置且同轴的磁体206(1)-206(4)。任何数量的磁体可以以类
似的布置来被组合。
44.图9示出了另一示例磁体阵列204f。在这一情形中,磁体阵列包括两个以上的磁体206,磁体206在平面中以相匹配磁极面向内来取向。在这一情形中,四个等间距磁体206(1)-206(4)以90度间隔分布。例如,使用间隔120度的三个磁体可以实现类似的配置。
45.图10示出了又一示例磁体阵列204g。在这一情形中,磁体阵列包括与非磁性材料1002(诸如木材、泡沫或非铁金属)同轴地布置的磁体206。此类配置可产生磁场,该磁场可由垂直于磁体206的长轴定位的霍尔效应传感器感测。
46.本设备取向概念可尤其适用于厚度受约束的设备,但也可与任何类型的计算设备和/或相关联的附件一起使用,诸如但不限于笔记本计算机、智能电话、可穿戴智能设备、平板和/或其他类型的现有的、正在开发的和/或尚未开发的设备。
47.设想了超过以上参照图1a-10所示的那些的用于这些设备及相关联的附件的制造、组装、和/或使用的各种方法。
48.在上文中描述了各个示例。附加的示例在下文中描述。一个示例包括一种设备,该设备包括:第一部分和第二部分,第一部分和第二部分能在从闭合取向到打开取向的取向范围中相对于彼此旋转,第一部分限定一对主表面且第二部分限定另一对主表面,所述一对主表面限定第一部分的厚度,所述另一对主表面限定第二部分的厚度,其中在闭合取向中,第一部分的第一主表面与第二部分的第一主表面相邻,并且其中在完全打开位置中,第一部分的第二主表面与第二部分的第二主表面相邻;第一细长磁体,其沿穿过该第一细长磁体的北极和南极的长轴延伸;第二细长磁体,其沿穿过该第二细长磁体的北极和南极的长轴延伸,其中第一细长磁体和第二细长磁体定位在第一部分的一对主表面之间,使得第一细长磁体和第二细长磁体的长轴彼此同轴并且基本上平行于第一部分的所述一对主表面,并且其中第一细长磁体和第二细长磁体的北极彼此面对,或者第一细长磁体和第二细长磁体的南极彼此面对;以及霍尔效应传感器,所述霍尔效应传感器定位在第二部分的一对主表面之间,并且被配置成基于第一细长磁体和第二细长磁体的磁场线来感测第一部分和第二部分是处于闭合取向、打开取向还是中间取向。
49.另一示例可包括上述和/或以下示例中的任一者,其中当第一部分的第一主表面接触第二部分的第一主表面或在与第二部分的第一主表面的五度接触内时,第一部分的第一主表面与第二部分的第一主表面相邻。
50.另一示例可包括上述和/或以下示例中的任一者,其中当第一部分的第一主表面接触第二部分的第二主表面或在与第二部分的第二主表面的五度接触内时,第一部分的第二主表面与第二部分的第二主表面相邻。
51.另一示例可以包括上述和/或以下示例中的任一者,其中第一和第二细长磁体与第一部分的该对主表面之间没有磁屏蔽。
52.另一示例可以包括上述和/或以下示例中的任一者,其中霍尔效应传感器与第二部分的该对主表面之间没有磁屏蔽。
53.另一示例可以包括上述和/或以下示例中的任一者,其中第一和第二细长磁体的南极彼此接触,或者其中第一和第二细长磁体的北极彼此接触。
54.另一示例可以包括上述和/或以下示例中的任一者,其中第一和第二细长磁体的南极彼此面对并且彼此间隔开。
55.另一示例可以包括上述和/或以下示例中的任一者,其中南极彼此间隔开的距离等于霍尔效应传感器的宽度。
56.另一示例可以包括上述和/或以下示例中的任一者,其中第一和第二细长磁体的长轴平行于第一和第二部分的旋转轴。
57.另一示例可以包括上述和/或以下示例中的任一者,其中基本上平行包括平行或在10度内平行。
58.另一示例可以包括上述和/或以下示例中的任一者,其中闭合取向包括第一部分的第一主表面与第二部分的第一主表面之间的从零度角到10度角的范围。
59.另一示例可以包括上述和/或以下示例中的任一者,其中打开取向包括第一部分的第二主表面与第二部分的第二主表面之间的从355度角到360度角的范围。
60.又一示例包括一种包含设备的系统,该系统具有:限定受约束厚度的壳体,在壳体内并具有感测轴的霍尔效应传感器,以及在壳体内的控制电路系统,其被配置成基于霍尔效应传感器的输出来确定设备附件接近设备的第一表面还是第二表面。设备附件包括一对相对且同轴地布置的磁体,当该磁体垂直于感测轴定位时可被霍尔效应传感器感测以确定该对相对且同轴地布置的磁体在壳体上方还是下方。
61.另一示例可以包括上述和/或下述示例中的任一者,其中设备附件包括键盘、触摸板、或游戏控制器。
62.又一示例可包括上述和/或下述示例中的任一者,其中壳体包括第一和第二平行表面并且其中厚度是在第一和第二表面之间并垂直于第一和第二表面来测得的。
63.又一示例可包括上述和/或下述示例中的任一者,其中感测轴垂直于第一和第二平行表面。
64.又一示例可包括上述和/或下述示例中的任一者,其中当设备附件抵靠第一或第二平行表面来被定位时,穿过一对同轴地布置的磁体中的这两个磁体的北极和南极的轴线平行于第一和第二平行表面。
65.又一示例可包括上述和/或下述示例中的任一者,其中霍尔效应传感器占据壳体内的所有受约束厚度。
66.又一示例可包括上述和/或下述示例中的任一者,其中控制电路系统可以基于来自霍尔效应传感器的输出来区分附件何时在第一表面或第二表面的所定义旋转范围内。
67.又一示例可包括上述和/或下述示例中的任一者,其中相对于第一表面的所定义旋转范围是零到五度,且相对于第二表面的所定义旋转范围是355度到360度。
68.又一示例包括一种系统,该系统包括被配置成感测沿感测轴的磁场的霍尔效应传感器和具有与感测轴相垂直的同轴且相反磁轴的一对细长磁体。
69.又一示例可包括上述和/或下述示例中的任一者,其中该系统包括第一和第二厚度受约束的设备,并且其中霍尔效应传感器位于第一设备中,并且所述一对细长磁体位于第二设备中。
70.又一示例可包括上述和/或下述示例中的任一者,其中该系统包括厚度受约束的设备和厚度受约束的附件,并且其中霍尔效应传感器位于设备或附件中的任一者中,并且所述一对细长磁体位于设备和附件中的另一者中。
71.尽管已用对结构特征和/或方法动作专用的语言描述了涉及取向感测的技术、方
法、设备、系统等,但可以理解,所附权利要求书中定义的主题不必限于所描述的具体特征或动作。相反,这些具体特征和动作是作为实现所要求保护的方法、设备、系统等的示例形式而公开的。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。