1.本发明属于水声信号处理领域,特别涉及一种主动声纳目标回波模拟方法。
背景技术:
2.主动声纳是远距离水下目标探测的主要手段。由于海洋环境复杂,水下目标种类繁多,且现有声纳没有对各种类型的目标建立完善的数据库,使得主动声纳对水下目标探测和识别的研究存在很大的困难。故此需要设计一种主动声纳目标回波模拟方法来开展水下目标探测和目标识别的训练和验证工作。
技术实现要素:
3.针对现有技术的不足,本发明公开一种主动声纳目标回波模拟方法,本发明实现了主动声纳多种目标类型的回波模拟,可以有效地开展水下目标探测和目标识别的训练和验证工作,具有一定的实用和经济价值。
4.本发明通过以下技术方案予以实现:
5.一种主动声纳目标回波模拟方法,包括如下:
6.步骤1:首先根据声纳发射参数,生成声纳发射信号;
7.步骤2:通过设定目标的初始方位距离以及目标和本舰的航速航向,解算出回波时刻目标相对本舰的方位距离和姿态角和径向速度信息;
8.步骤3:然后通过声纳发射方式、发射功率、水声传播损失和目标类型解析声纳接收到的目标回波强度,再根据阵元灵敏度、衰减器衰减倍数、da位数,计算得到回波信号幅度;
9.步骤4:然后根据目标类型和目标的方位、距离、姿态信息,建立多亮点目标模型,获得回波亮点数和各亮点的方位、距离、幅度值。
10.步骤5:再根据声基阵阵型参数以及目标位置和本舰的姿态信息,计算各亮点回波信号在每个阵元上相对于参考点的接收时延;
11.步骤6:最后根据获得的所有多亮点信息,生成多亮点回波信号,叠加合成每个阵元收到的主动目标回波信号。
12.优选的,在所述步骤1中,发射信号形式采用单频cw和双曲调频hfm两种;
13.其中,
14.单频信号根据输入的中心频率f0、信号脉宽t信号参数,按照下述公式生成相应的发射信号:
15.s(t)=exp(j2πf0t),t∈[0,t];
[0016]
双曲调频信号根据输入的中心频率f0、信号脉宽t、信号带宽b信号参数,按照下述公式生成相应的发射信号:
[0017]
s(t)=exp[j2π(f
02-b2/4)t/b
·
log(1 t
·
b/t/(f0 b/2))],t∈[0,t]。
[0018]
优选的,所述步骤2具体包括如下:
[0019]
假设目标和本舰均作匀速直线运动,设定目标的初始方位距离、目标、本舰的航速航向信息以及每个扫描量程的开始时刻,解算每个量程目标相对本舰的方位距离和姿态角、径向速度信息;
[0020]
以本舰初始位置为参考点,第i个量程起始时刻的本舰位置的解算公式为:
[0021][0022]
式中:
[0023]
x_shipi为第i个量程的本舰在直角坐标系x轴上的位置;y_shipi为第i个量程的本舰在直角坐标系y轴上的位置;v_ship为本舰航速;α_ship为本舰航速;
[0024]
目标的初始位置为:
[0025][0026]
式中:
[0027]
r0为目标的初始距离;θ0为目标的初始方位;x_tag0为目标在直角坐标系x轴上的初始位置;y_tag0为目标在直角坐标系y轴上的初始位置;
[0028]
则第i个量程起始时刻的目标位置为:
[0029][0030]
式中:
[0031]
x_tagi为第i个量程的目标在直角坐标系x轴上的位置;y_tagi为第i个量程的目标在直角坐标系y轴上的位置;v_tag为目标航速;α_tag为目标航向;
[0032]
根据本舰和目标在地理坐标系上的位置,解得目标每个量程时刻相对本舰的方位、距离,进而再根据目标和本舰的航速航向求得目标相对本舰运动的姿态角和径向速度:
[0033][0034]
式中:
[0035]ri
为第i个量程目标相对本舰的距离;θi为第i个量程目标相对本舰的方位;αi为第i个量程目标相对本舰的姿态角,v_radi为第i个量程目标相对本舰的径向速度。
[0036]
优选的,所述步骤3具体包括如下:
[0037]
根据设定的目标类型以及目标姿态角信息,计算目标的反射强度ts。
[0038]
各目标类型360度范围内的不同姿态角的反射强度数据根据模型提前计算好保存为数组供该模块读取;
[0039]
然后根据声纳声源级、传播损失、目标反射强度、噪声级,计算接收端回波强度,再根据阵元灵敏度、衰减器衰减倍数、da位数,计算得到信号幅度;
[0040]
接收端回波强度由下式给出:
[0041]
el=sl-2tl ts-nl;
[0042]
式中:
[0043]
el为接收端回波强度;sl为发射声源级;tl为传播损失;ts为目标反射强度;nl为噪声级;
[0044]
信号电压值与回波强度和阵元灵敏度的关系如下式:
[0045]mp
el=20logu;
[0046]
即:
[0047][0048]
式中:
[0049]
u为回波信号电压值;m
p
为阵元灵敏度;el为接收端回波强度;
[0050]
再由固定增益倍数和da位数,获得回波信号幅度:
[0051]
a=g
·u·
(2
n-1-1)/v
pp
;
[0052]
式中:
[0053]
a为回波信号幅度;u为回波信号电压值;g为衰减器衰减倍数;n为da位数;v
pp
为da最大电压。
[0054]
优选的,所述步骤4具体包括如下:
[0055]
根据不同目标类型以及目标的方位、距离、姿态角信息,计算回波亮点数和各亮点的方位、距离、幅度值;
[0056]
其中,各目标类型的尺度、亮点数和各亮点的距离分布及强度占比根据模型提前计算好保存为数组供该模块读取;
[0057]
若已知选定的目标类型的尺度、亮点数、亮点距离分布和各亮点强度占比,假设目标回波的方位距离分别为(θi,ri),姿态角为αi,则各亮点的距离、方位、幅度由下式计算:
[0058][0059][0060]ai,k
=ak·ai
;i=1,
…
,n;k=1,
…
,m;
[0061]
式中:
[0062]
l为目标尺度;m为亮点数;lk为亮点距离分布;ak为各亮点强度占比;ri为第i个量程目标相对本舰的距离;θi为第i个量程目标相对本舰的方位;r
i,k
为第i个量程第k个亮点的目标相对本舰的距离;θ
i,k
为第i个量程第k个亮点的目标相对本舰的方位;a
i,k
为第i个量程第k个亮点的幅度值。
[0063]
优选的,所述步骤5具体包括如下:
[0064]
首先,根据声基阵阵型参数解算基阵各阵元在空间直角坐标系下的阵元坐标(xj,yj,zj),j=1,
…
,n,然后根据本舰的实时纵横摇和艏向角信息,计算实际的阵元坐标(xj',yj',zj'),j=1,
…
,n:
[0065][0066]
式中:
[0067]
φ为实时纵摇角;γ为实时横摇角;为实时艏向角;
[0068]
再根据亮点的方位和俯仰角,计算各亮点在每个阵元上相对参考点的接收延迟距离:
[0069][0070]
式中:
[0071]
ρi为第i个量程的俯仰角;θ
i,k
为第i个量程第k个亮点的目标相对本舰的方位;d
i,j,k
为第i个量程第k个亮点在第j个阵元上的延迟距离;
[0072]
最后,读取实时声速,就能获得各亮点在每个阵元上的时延值:
[0073]
τ
i,j,k
=d
i,j,k
/c;
[0074]
式中:
[0075]
τ
i,j,k
为第i个量程第k个亮点在第j个阵元上的延时;d
i,j,k
为第i个量程第k个亮点在第j个阵元上的延迟距离;c为水中声速。
[0076]
优选的,所述步骤6具体包括如下:
[0077]
主动目标回波的每个阵元信号都由多亮点回波信号叠加组合而成,每个亮点信号与发射信号相比,主要存在时间延迟、多普勒频移和幅度变化的差别;
[0078]
其中目标多普勒频移是由于目标与本舰的相对运动产生的,其与目标的径向速度有关,令目标多普勒展缩因子表示为:
[0079]
k_dpli=(c-v_radi)/(c v_radi);
[0080]
式中:
[0081]
v_radi为第i个量程目标相对本舰的径向速度;c为水中声速;k_dpli为第i个量程的目标多普勒展缩因子;
[0082]
假设发射信号用send_sig=s(a,f0,b,t,t)表示,则每个阵元的目标回波信号表示为:
[0083][0084]
t∈[2
·ri,k
/c,2
·ri,k
/c t/k_dpli]
[0085]
j=1,
…
,48;
[0086]
式中:
[0087]
recv_sigj为第j个阵元收到的目标回波信号;a为发射信号幅度系数;f0为发射信号中心频率;b为发射信号带宽;t为发射信号脉宽;k_dpli为第i个量程的目标多普勒展缩因子;τ
i,j,k
为第i个量程第k个亮点在第j个阵元上的延时;a
i,k
为第i个量程第k个亮点的幅度值;r
i,k
为第i个量程第k个亮点的目标相对本舰的距离;c为水中声速。
[0088]
本发明具有以下有益效果:
[0089]
本发明根据实际需求,结合主动声纳回波信号产生机理进行建模,根据声纳平台工作参数设计发射信号,针对不同种类目标特性,通过多普勒频移、回波延时、传播损失等对目标的运动状态、距离和目标强度信息进行模拟,实现了主动声纳多种目标类型的回波模拟,可以有效地开展水下目标探测和目标识别的训练和验证工作,具有一定的实用和经济价值。
附图说明
[0090]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0091]
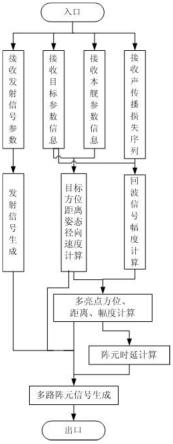
图1为本发明目标回波模拟流程图。
[0092]
图2为本发明目标与本舰相对运动模型图。
[0093]
图3为本发明多亮点相对位置模型图。
具体实施方式
[0094]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0095]
如图1-3所示:本发明提供了一种主动声纳目标回波模拟方法,首先根据声纳发射参数,生成声纳发射信号。通过设定目标的初始方位距离以及目标和本舰的航速航向,解算出回波时刻目标相对本舰的方位距离和姿态角和径向速度等信息。然后通过声纳发射方式、发射功率、水声传播损失和目标类型解析声纳接收到的目标回波强度,再根据阵元灵敏度、衰减器衰减倍数、da位数,计算得到回波信号幅度。然后根据目标类型和目标的方位、距离、姿态信息,建立多亮点目标模型,获得回波亮点数和各亮点的方位、距离、幅度值。再根据声基阵阵型参数以及目标位置和本舰的姿态信息,计算各亮点回波信号在每个阵元上相对于参考点的接收时延。最后,根据获得的所有多亮点信息,生成多亮点回波信号,叠加合成每个阵元收到的主动目标回波信号。
[0096]
具体包括如下:
[0097]
1)发射信号生成
[0098]
本装置采用单频(cw)和双曲调频(hfm)两种发射信号形式。
[0099]
单频信号根据输入的中心频率f0、信号脉宽t等信号参数,按照下述公式生成相应的发射信号,
[0100]
s(t)=exp(j2πf0t),t∈[0,t]
[0101]
双曲调频信号根据输入的中心频率f0、信号脉宽t、信号带宽b等信号参数,按照下述公式生成相应的发射信号,
[0102]
s(t)=exp[j2π(f
02-b2/4)t/b
·
log(1 t
·
b/t/(f0 b/2))],t∈[0,t]
[0103]
2)目标方位、距离、姿态、径向速度计算
[0104]
假设目标和本舰均作匀速直线运动,设定目标的初始方位距离、目标和本舰的航速航向信息,以及每个扫描量程的开始时刻,可以解算每个量程目标相对本舰的方位距离和姿态角、径向速度等信息。
[0105]
以本舰初始位置为参考点,第i个量程起始时刻的本舰位置的解算公式为:
[0106][0107]
式中:
[0108]
x_shipi为第i个量程的本舰在直角坐标系x轴上的位置;
[0109]
y_shipi为第i个量程的本舰在直角坐标系y轴上的位置;
[0110]
v_ship为本舰航速;
[0111]
α_ship为本舰航速。
[0112]
目标的初始位置为:
[0113][0114]
式中:
[0115]
r0为目标的初始距离;
[0116]
θ0为目标的初始方位;
[0117]
x_tag0为目标在直角坐标系x轴上的初始位置;
[0118]
y_tag0为目标在直角坐标系y轴上的初始位置。
[0119]
则第i个量程起始时刻的目标位置为:
[0120][0121]
式中:
[0122]
x_tagi为第i个量程的目标在直角坐标系x轴上的位置;
[0123]
y_tagi为第i个量程的目标在直角坐标系y轴上的位置;
[0124]
v_tag为目标航速;
[0125]
α_tag为目标航向。
[0126]
根据本舰和目标在地理坐标系上的位置,可解得目标每个量程时刻相对本舰的方位、距离,进而,再根据目标和本舰的航速航向可求得目标相对本舰运动的姿态角和径向速度:
[0127][0128]
式中:
[0129]ri
为第i个量程目标相对本舰的距离;
[0130]
θi为第i个量程目标相对本舰的方位;
[0131]
αi为第i个量程目标相对本舰的姿态角。
[0132]
v_radi为第i个量程目标相对本舰的径向速度;
[0133]
3)回波信号幅度计算
[0134]
根据设定的目标类型(敷瓦潜艇、非敷瓦潜艇、商船、沉船/礁石、鱼群),以及目标姿态角信息,计算目标的反射强度ts(ttype,α)。
[0135]
各目标类型360度范围内(精度为1度)的不同姿态角的反射强度数据根据模型提前计算好保存为数组供该模块读取。
[0136]
然后根据声纳声源级(发射方式、发射功率)、传播损失、目标反射强度、噪声级等,计算接收端回波强度,再根据阵元灵敏度、衰减器衰减倍数、da位数,计算得到信号幅度。
[0137]
接收端回波强度由下式给出:
[0138]
el=sl-2tl ts-nl
[0139]
式中:
[0140]
el为接收端回波强度;
[0141]
sl为发射声源级;
[0142]
tl为传播损失;
[0143]
ts为目标反射强度;
[0144]
nl为噪声级。
[0145]
信号电压值与回波强度和阵元灵敏度的关系如下式:
[0146]mp
el=20logu
[0147]
即:
[0148][0149]
式中:
[0150]
u为回波信号电压值;
[0151]mp
为阵元灵敏度;
[0152]
el为接收端回波强度。
[0153]
再由固定增益倍数和da位数,获得回波信号幅度:
[0154]
a=g
·u·
(2
n-1-1)/v
pp
[0155]
式中:
[0156]
a为回波信号幅度;
[0157]
u为回波信号电压值;
[0158]
g为衰减器衰减倍数;
[0159]
n为da位数;
[0160]vpp
为da最大电压。
[0161]
4)多亮点方位、距离、幅度计算
[0162]
根据不同目标类型(敷瓦潜艇、非敷瓦潜艇、商船、沉船/礁石、鱼群),以及目标的方位、距离、姿态角信息,计算回波亮点数和各亮点的方位、距离、幅度值。
[0163]
其中,各目标类型的尺度、亮点数和各亮点的距离分布及强度占比根据模型提前计算好保存为数组供该模块读取。
[0164]
若已知选定的目标类型的尺度、亮点数、亮点距离分布和各亮点强度占比,假设目标回波的方位距离分别为(θi,ri),姿态角为αi,则各亮点的距离、方位、幅度由下式计算:
[0165][0166][0167]ai,k
=ak·ai
;i=1,...,n;k=1,
…
,m
[0168]
式中:
[0169]
l为目标尺度;
[0170]
m为亮点数;
[0171]
lk为亮点距离分布;
[0172]ak
为各亮点强度占比;
[0173]ri
为第i个量程目标相对本舰的距离;
[0174]
θi为第i个量程目标相对本舰的方位。
[0175]ri,k
为第i个量程第k个亮点的目标相对本舰的距离;
[0176]
θ
i,k
为第i个量程第k个亮点的目标相对本舰的方位;
[0177]ai,k
为第i个量程第k个亮点的幅度值;
[0178]
5)阵元时延计算
[0179]
根据声基阵阵型参数以及目标位置和本舰的姿态信息,计算各亮点回波信号在每个阵元上相对于参考点的接收时延。
[0180]
首先,根据声基阵阵型参数解算基阵各阵元在空间直角坐标系下的阵元坐标(xj,yj,zj),j=1,
…
,n,然后根据本舰的实时纵横摇和艏向角信息,计算实际的阵元坐标(xj',yj',zj'),j=1,
…
,n:
[0181][0182]
式中:
[0183]
φ为实时纵摇角;
[0184]
γ为实时横摇角;
[0185]
为实时艏向角;
[0186]
再根据亮点的方位和俯仰角,计算各亮点在每个阵元上相对参考点的接收延迟距离:
[0187][0188]
式中:
[0189]
ρi为第i个量程的俯仰角;
[0190]
θ
i,k
为第i个量程第k个亮点的目标相对本舰的方位;
[0191]di,j,k
为第i个量程第k个亮点在第j个阵元上的延迟距离;
[0192]
最后,读取实时声速,就可获得各亮点在每个阵元上的时延值:
[0193]
τ
i,j,k
=d
i,j,k
/c
[0194]
式中:
[0195]
τ
i,j,k
为第i个量程第k个亮点在第j个阵元上的延时。
[0196]di,j,k
为第i个量程第k个亮点在第j个阵元上的延迟距离;
[0197]
c为水中声速;
[0198]
6)多路阵元信号生成
[0199]
主动目标回波的每个阵元信号都由多亮点回波信号叠加组合而成,每个亮点信号与发射信号相比,主要存在时间延迟、多普勒频移和幅度变化的差别。
[0200]
其中目标多普勒频移是由于目标与本舰的相对运动产生的,与目标的径向速度有关,令目标多普勒展缩因子表示为:
[0201]
k_dpli=(c-v_radi)/(c v_radi)
[0202]
式中:
[0203]
v_radi为第i个量程目标相对本舰的径向速度;
[0204]
c为水中声速;
[0205]
k_dpli为第i个量程的目标多普勒展缩因子。
[0206]
假设发射信号用send_sig=s(a,f0,b,t,t)表示,则每个阵元的目标回波信号可表示为:
[0207][0208]
式中:
[0209]
recv_sigj为第j个阵元收到的目标回波信号;
[0210]
a为发射信号幅度系数;
[0211]
f0为发射信号中心频率;
[0212]
b为发射信号带宽;
[0213]
t为发射信号脉宽;
[0214]
k_dpli为第i个量程的目标多普勒展缩因子;
[0215]
τ
i,j,k
为第i个量程第k个亮点在第j个阵元上的延时。
[0216]ai,k
为第i个量程第k个亮点的幅度值;
[0217]ri,k
为第i个量程第k个亮点的目标相对本舰的距离;
[0218]
c为水中声速。
[0219]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。