1.本发明涉及摄影测量技术领域,尤其涉及一种遥感卫星立体影像高程精度定量评估方法。
背景技术:
2.卫星影像几何精度包括平面精度和高程精度,它们是决定卫星影像质量及其测图应用能力的最关键指标。开展卫星立体影像高程精度理论分析和定量评估既是开展卫星影像应用的基础保障性工作,也可以为遥感卫星研制过程中技术指标的设计和制定提供参考依据。目前国内外学者对高分辨率遥感卫星影像的几何精度的评价工作主要集中在选取典型试验区,利用高精度地面控制资料开展影像几何精度验证实验。该方法需要外业实测或者收集高精度控制点,成本高昂、流程复杂,导致无法大规模开展;且受限于试验区数量不足,导致对影像高程精度的评价结果存在一定的局限性和欺骗性。还有少量学者综合考虑了卫星成像过程中的姿态和轨道误差影响,设计了卫星立体影像无控高程精度估算方法。该方法没有考虑影响卫星立体影像高程精度的其他重要因素,导致对影像高程精度的评价结果准确性不足。
3.大量研究表明,影响推扫式卫星影像高程精度的主要因素包括卫星成像过程中的姿态测量误差、轨道测量误差和时间误差,以及由卫星原始下传影像生成基础影像产品过程中所用到的几何内检校和几何外检校参数的误差。综上所述,目前急需从卫星几何成像机理出发,较为系统地分析卫星成像过程中和影像处理过程中各类主要误差对立体影像高程误差的影响状况,定量分析并推导出各类误差源对影像高程精度影响程度,设计出一种推扫式卫星立体影像高程精度定量评估方法。
技术实现要素:
4.为解决上述技术问题,本发明的目的是提供一种遥感卫星立体影像高程精度定量评估方法。
5.本发明的目的通过以下的技术方案来实现:
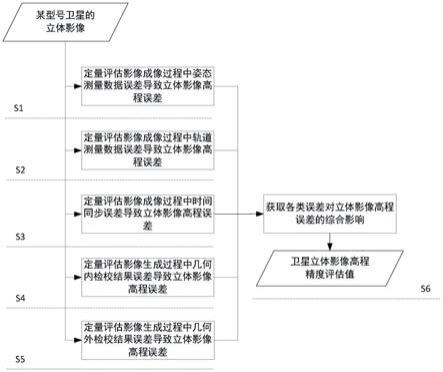
6.一种遥感卫星立体影像高程精度定量评估方法,包括:
7.s1定量评估卫星影像成像过程中姿态测量数据误差导致的卫星立体影像高程定位误差δh
attitude
;
8.s2定量评估卫星影像成像过程中轨道测量数据误差导致的卫星立体影像高程定位误差δh
orbit
;
9.s3定量评估卫星影像成像过程中时间同步误差导致的卫星立体影像高程定位误差δh
time
;
10.s4定量评估卫星影像处理过程中几何内检校结果误差导致的卫星立体影像高程定位误差δh
internal_calib
;
11.s5定量评估卫星影像处理过程中几何外检校结果误差导致的卫星立体影像高程
定位误差δh
external_calib
;
12.s6综合评估卫星影像成像过程中和卫星影像处理过程中各类误差对立体影像高程精度的总体影响,获得卫星立体影像最终的高程定位误差,亦即卫星立体影像高程精度定量评估结果。
13.与现有技术相比,本发明的一个或多个实施例可以具有如下优点:
14.(1)从卫星影像成像和生产过程的各类误差对卫星影像高程精度的影响机理出发,定量推导了主要误差源对立体影像高程精度影响方式和影响程度,是一种全新且有效的卫星影像高程精度评估方法。
15.(2)全面考虑了卫星成像过程中的姿态测量误差、轨道测量误差和时间误差,以及由卫星原始下传影像生成基础影像产品过程中所用到的几何内检校和几何外检校参数误差对立体影像高程精度的综合影响效果和影响大小,使得最终的评估结果科学、准确、可靠。
16.(3)相比于传统的利用典型试验区开展影像几何精度验证实验的影像精度评估方法,本发明方法操作简单,成本极低,可适用任何区域和任何时间段卫星影像高程精度的定量评估,具有极大的实用性优势。
17.(4)除了可用于影像高程精度评估外,其中的误差影响影像高程几何精度的机理和定量公式等,还可以为遥感卫星研制过程中技术指标的设计和制定提供参考依据。
附图说明
18.图1是遥感卫星立体影像高程精度定量评估方法的原理流程图。
具体实施方式
19.为使本发明的目的、技术方案和优点更加清楚,下面将结合实施例及附图对本发明作进一步详细的描述。
20.如图1所示,为遥感卫星立体影像高程精度定量评估方法的流程,包括以下步骤:
21.步骤s1定量评估卫星影像成像过程中姿态测量数据误差导致的卫星立体影像高程定位误差δh
attitude
,该步骤具体包括如下内容,
22.步骤s11,根据卫星影像成像过程中姿态俯仰角误差对立体影像高程误差的影响原理,定义评估姿态俯仰角误差导致的立体影像高程误差dh
pitch
的方法,公式为,
[0023][0024]
其中,为卫星姿态俯仰角误差;为构成立体影像的两张影像的交会光线与正视方向夹角;b为基线;h为卫星轨道高度。
[0025]
步骤s12,根据卫星影像成像过程中姿态偏航角误差对立体影像高程误差的影响原理,定义评估姿态偏航角误差导致的立体影像高程误差dh
yaw
的方法,公式为,
[0026][0027]
其中,δκ为卫星姿态偏航角误差;y为影像幅宽。
[0028]
步骤s13,定义评估姿态误差导致的立体影像高程误差δh
attitude
的方法,公式为,
[0029][0030]
步骤s2、定量评估卫星影像成像过程中轨道测量数据误差导致的卫星立体影像高程定位误差δh
orbit
;
[0031]
卫星在高空轨道上运行时,各种摄动力量级较小且连续作用于卫星上,因此同轨获取的立体影像上各自的轨道误差在量级和方向上可认为基本一致,将不会改变立体影像的交会角度,因此垂轨向和沿轨向轨道误差引起的立体像对高程误差可以忽略。因此仅有轨道径向误差会引起的立体像对高程误差,定义评估轨道误差导致的立体影像高程误差δh
orbit
的方法,公式为,
[0032]
δh
orbit
=δz
[0033]
其中,δz为卫星轨道径向误差。
[0034]
步骤s3、定量评估卫星影像成像过程中时间同步误差导致的卫星立体影像高程定位误差δh
time
;
[0035]
根据卫星影像成像过程中星上各类设备时间之间同步误差对立体影像高程误差的影响原理,定义评估卫星时间同步误差导致的立体影像高程误差δh
time
的方法,公式为,
[0036][0037]
其中,δt为时间同步误差,v为卫星飞行速度。
[0038]
步骤s4、定量评估卫星影像处理过程中几何内检校结果误差导致的卫星立体影像高程定位误差δh
internal_calib
;
[0039]
几何内检校是指精确标定采用ccd探元指向角形式表达的卫星相机的内方位元素,几何内检校结果误差即标定后相机ccd探元指向角的误差,根据卫星影像处理过程中几何内检校结果在沿轨方向和垂轨方向误差对立体影像高程误差的影响原理,认定仅有几何内检校结果在沿轨方向误差才会引起的立体像对高程误差,定义评估几何内检校结果误差导致的立体影像高程误差δh
internal_calib
的方法,公式为,
[0040][0041]
其中,为几何内检校结果在在沿轨方向的角度误差,为几何内检校标定的ccd探元指向角在沿轨方向的角度。
[0042]
步骤s5、定量评估卫星影像处理过程中几何外检校结果误差导致的卫星立体影像高程定位误差δh
external_calib
;
[0043]
几何外检校是指计算获取一个偏置旋转矩阵来补偿卫星成像过程中外方位元素的系统误差,步骤s5具体包括如下内容,
[0044]
步骤s51,根据几何外检校结果在俯仰角方向的误差对立体影像高程误差的影响原理,定义评估几何外检校结果在俯仰角方向误差导致的立体影像高程误差dh
extercalib_pitch
的方法,公式为,
[0045]
[0046]
其中,为几何外检校结果在在俯仰角方向误差,为几何外检校结果(即偏置旋转矩阵)在俯仰角方向的旋转角度值。
[0047]
步骤s52,根据几何外检校结果在偏航角方向的误差对立体影像高程误差的影响原理,定义评估几何外检校结果在偏航角方向误差导致的立体影像高程误差dh
extercalib_yaw
的方法,公式为,
[0048][0049]
其中,δκ
extercalib
为几何外检校结果在在偏航角方向误差。
[0050]
步骤s53,定义评估几何外检校结果误差导致的立体影像高程误差δh
external_calib
的方法,公式为,
[0051][0052]
步骤s6、由于步骤s1-s5中的各类误差是独立传播,因此立体影像最终的高程误差是步骤s1-s5中的各类误差对高程精度影响的综合结果,利用下式综合评估卫星影像成像和卫星影像处理过程中各类误差对立体影像高程精度的总体影响,获得卫星立体影像最终的高程定位误差δh,亦即卫星立体影像高程精度定量评估结果:
[0053][0054]
虽然本发明所揭露的实施方式如上,但所述的内容只是为了便于理解本发明而采用的实施方式,并非用以限定本发明。任何本发明所属技术领域内的技术人员,在不脱离本发明所揭露的精神和范围的前提下,可以在实施的形式上及细节上作任何的修改与变化,但本发明的专利保护范围,仍须以所附的权利要求书所界定的范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。