包括电刺激系统的支撑装置及其使用方法
1.相关申请的交叉引用
2.本技术要求于2020年6月19日提交的并且标题为“support devices including electrical stimulation systems and methods for using the same”的美国专利申请序列号16/906,841的权益和优先权,其内容通过引用全部并入本文。
技术领域
3.本说明书一般涉及包括电刺激系统的支撑装置及其操作方法。
背景技术:
4.支撑装置,诸如轮椅等,通常用于协助用户从一个位置移动到另一个位置。例如,轮椅可以协助腿部受限或不使用腿部的用户在不同位置之间移动。然而,不使用人的腿部可能导致肌肉萎缩和/或其他不良后果。
技术实现要素:
5.根据本公开的支撑装置包括电刺激电极。在实施例中,可以接合电刺激电极,从而触发坐在支撑装置内的用户的肌肉收缩。在本文描述的实施例中,电刺激电极的接合可以至少部分地基于支撑装置行进的距离。通过将电刺激电极的接合与支撑装置行进的距离关联,电刺激电极可以使用户的肌肉收缩,仿佛用户正在行走支撑装置行进的距离。通过以这种方式收缩用户的肌肉,根据本公开的支撑装置可以帮助限制用户腿部的肌肉萎缩。
6.在一个实施例中,支撑装置包括在结构上被配置为支撑用户的基座部分、耦合到基座部分并且可以与表面接合的一个或多个接合构件、距离传感器、电耦合到一个或多个电刺激电极的电源,以及通信地耦合到距离传感器和电源的控制器。控制器包括处理器和非暂态处理器可读存储介质,非暂态处理器可读存储介质包括计算机可读和可执行指令集,计算机可读和可执行指令集在被执行时使处理器接收来自距离传感器的指示检测到的所述支撑装置行进的距离的信号,以及至少部分地基于检测到的支撑装置行进的距离,向电源发送接合一个或多个电刺激电极的信号。
7.在另一个实施例中,一种操作支撑装置的方法,该方法包括沿着表面移动支撑装置,其中支撑装置包括在结构上被配置为支撑用户的基座部分,以及耦合到基座部分的一个或多个车轮;检测支撑装置沿着表面行进的距离;以及至少部分地基于检测到的支撑装置行进的距离接合一个或多个电刺激电极。
8.考虑到以下详细描述,结合附图,将更充分地理解本文所述实施例提供的这些和附加特征。
附图说明
9.附图中阐述的实施例本质上是说明性的和示例性的,并不旨在限制权利要求所限定的主题。当结合以下附图阅读时,可以理解说明性实施例的以下详细描述,其中相同的结
构用相同的附图标记表示,并且其中:
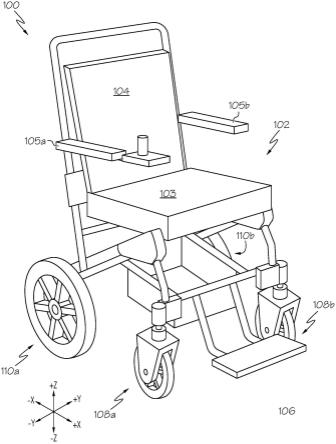
10.图1示意性描述了根据本文所示和描述的一个或多个实施例的支撑装置的透视图;
11.图2a示意性描述了根据本文所示和描述的一个或多个实施例的图1的支撑装置的侧视图;
12.图2b示意性描述了根据本文所示和描述的一个或多个实施例的图1的支撑装置的正视图;
13.图3示意性描述了根据本文所示和描述的一个或多个实施例的图1的支撑装置的控制图;以及
14.图4示意性描述了根据本文所示和描述的一个或多个实施例的与图1的支撑装置一起使用的示例电极图。
具体实施方式
15.本文所述实施例一般涉及包括电刺激电极的支撑装置。在实施例中,可以至少部分地基于支撑装置行进的距离激活电刺激电极。通过至少部分地基于支撑装置行进的距离激活电刺激电极,用户的腿可以以类似于用户要行走支撑装置行进的距离的方式收缩。通过以这种方式收缩用户的腿部肌肉,与不刺激和收缩用户的腿部肌肉的支撑装置相比,可以减少肌肉萎缩。现在将参考附图描述这些和其他实施例。
16.如本文所述,短语“通信地耦合”指的是本文所述支撑装置的组件的互连,使得可以在组件之间发送信号,并且可以包括例如但不限于,有线连接、光学连接、无线连接等。
17.首先参考图1,示意性描述了支撑装置100的透视图。在实施例中,支撑装置100包括在结构上被配置为支撑用户的基座部分102。例如,在图1描述的实施例中,基座部分102包括座位部分103和靠背104。在使用中,用户可以坐在座位部分103上并且可以靠在靠背104上。在一些实施例中,基座部分102还可以包括一个或多个扶手。例如,在图1描述的实施例中,基座部分102包括可以支撑用户的手臂的第一扶手105a和第二扶手105b。
18.在实施例中,支撑装置100包括耦合到基座部分102的一个或多个接合构件。一个或多个接合构件总体上与表面接合,诸如地板或地面。在图1描述的实施例中,一个或多个接合构件是耦合到基座部分102的一个或多个车轮。例如,在图1描述的实施例中,支撑装置100包括一对前轮108a、108b,以及一对后轮110a、110b。前轮108a、108b,以及后轮110a、110b可以沿着表面“滚动”以向支撑装置100提供移动性。虽然在图1描述的实施例中,一个或多个接合构件包括前轮108a、108b以及后轮110a、110b,但是应当理解,一个或多个接合构件可以包括适用于沿着表面移动支撑装置的任何适合的构造,例如但不限于可移动腿、轨道等。此外,虽然在图1描述的实施例中包括前轮108a、108b以及后轮110a、110b,但是应当理解,支撑装置100可以包括任何适合数量的车轮,并且可以包括大于或小于图1所示实施例中描述的四个车轮108a、108b、110a、110b。
19.在一些实施例中,支撑装置100包括耦合到基座部分102的脚踏板106,其可以用于支撑用户的脚。在一些实施例中,支撑装置100可以包括位于座位部分103和脚踏板106之间的小腿支撑件等以支撑用户的腿。
20.参考图2a和图2b,分别示意性描述了支撑装置100的侧视图和正视图。在一些实施
例中,支撑装置100包括一个或多个电刺激电极。例如,在图2a和图2b描述的实施例中,支撑装置100包括第一股四头肌电刺激电极134a和第二股四头肌电刺激电极134d。第一股四头肌电刺激电极134a和第二股四头肌电刺激电极134d在结构上被配置为接合用户的腿部的四头肌肌肉,例如用户的左右股四头肌。在一些实施例中,支撑装置100包括第一臀肌电刺激电极134b和第二臀肌电刺激电极134c。第一臀肌电刺激电极134b和第二臀肌电刺激电极134c在结构上被配置为接合用户的腿部(例如,用户的右腿和左腿)的腘绳肌(例如,臀大肌和/或股二头肌)。
21.在一些实施例中,支撑装置100包括第一胫骨电刺激电极136a和第二胫骨电刺激电极136d。第一胫骨电刺激电极136a和第二胫骨电刺激电极136d在结构上被配置为接合用户的腿部的胫骨前肌(例如,用户的右腿和左腿)。在一些实施例中,支撑装置100还包括第一小腿电刺激电极136b和第二小腿电刺激电极136c。第一小腿电刺激电极136b和第二小腿电刺激电极136c在结构上被配置为接合用户的腿部(例如用户的右腿和左腿)的小腿肌肉。
22.虽然在图2a和图2b描述的实施例中,第一和第二股四头肌电刺激电极134a、134d,第一和第二臀肌电刺激电极134b、134c,第一和第二胫骨电刺激电极136a、136d,以及第一和第二小腿电刺激电极136b、136c,但是应当理解,支撑装置100可以包括任何适合数量的在结构上被配置为接合用户的腿部的肌肉的电刺激电极。此外,虽然电刺激电极134a、134b、134c、134d、136a、136b、136c、136d被描绘为位于支撑装置100的基座部分102上,但是应当理解,这仅仅是一个示例。在一些实施例中,电刺激电极可以嵌入与用户接合或由用户穿着的织物、衣服等中。
23.参考图3,示意性描述了支撑装置100的控制图。在实施例中,支撑装置100包括控制器120。如图所示,控制器120包括处理器122、数据存储组件124、和/或存储器组件126。存储器组件126可以被配置为易失性和/或非易失性存储器,并且因此,可以包括随机存取存储器(包括sram、dram和/或其他类型的ram)、闪存、安全数字(sd)存储器、寄存器、光盘(cd)、数字多功能盘(dvd)和/或其它类型的非暂态计算机可读介质。根据特定实施例,这些非暂态计算机可读介质可以驻留在控制器120内和/或控制器120的外部。
24.存储器组件126可以以一个或多个计算机可读和可执行指令集的形式存储操作逻辑、分析逻辑以及通信逻辑。分析逻辑和通信逻辑可以各自包括多个不同的逻辑块,例如,每个逻辑块可以实现为计算机程序、固件和/或硬件。本地接口还被包括在控制器120中,并且可以被实现为总线或其他通信接口,以便于控制器120的组件之间的通信。
25.处理器122可以包括任何可操作以接收和执行指令(诸如来自数据存储组件124和/或存储器组件126)的处理组件。应当理解虽然图3中的组件被示为驻留在控制器120内,这仅仅是一个示例,并且在一些实施例中,一个或多个组件可以驻留在控制器120的外部。还应当理解,虽然控制器120被示为单个装置,这也仅仅是一个示例。
26.在实施例中,控制器120通信地耦合到支撑装置100的一个或多个组件。例如,在图3描述的实施例中,控制器120通信地耦合到距离传感器130和电源132。在一些实施例中,支撑装置100还包括用户输入138、电机140、和/或通信地耦合到控制器120的倾斜检测装置142。
27.在实施例中,距离传感器130在结构上被配置为检测支撑装置100行进的距离。例如,在一些实施例中,距离传感器130可以是耦合到车轮108a、108b、110a、110b(图2b)中的
一个或多个车轮的编码器等。在实施例中,距离传感器130通信地耦合到控制器120,使得可以向控制器120发送信号和/或从控制器120接收信号。例如,在实施例中,距离传感器130可以向控制器120发送指示支撑装置100行进的距离的信号,如本文更详细描述的。在一些实施例中,电刺激电极134a、134b、134c、134d、136a、136b、136c、136d中的一个或多个电刺激电极的激活至少部分地基于检测到的支撑装置100行进的距离,如本文更详细描述的。
28.在实施例中,电源132包括适用于向电刺激电极134a、134b、134c、134d、136a、136b、136c、136d提供电力的装置。例如但不限于,在实施例中电源132可以包括电耦合到电刺激电极134a、134b、134c、134d、136a、136b、136c、136d中的一个或多个电刺激电极的电池等。在一些实施例中,电源132可以包括电极控制器133,其位于电源132的内部或电源132的外部。电极控制器133可以允许电源132向电刺激电极134a、134b、134c、134d、136a、136b、136c、136d选择性地提供电力。例如,电源132的电极控制器133可以接收来自控制器120的信号,引导电源132选择性地接合(例如,提供电力)电刺激电极34a、134b、134c、134d、136a、136b、136c、136d中的一个或多个电刺激电极,如本文更详细描述的。
29.在实施例中,用户输入138可以包括适用于接收来自用户的指令和/或信息的装置。例如,在实施例中,用户输入138可以包括字母数字键盘、图形用户界面(gui)等。用户输入138可以向控制器120发送和/或接收信号,例如,用户输入138可以接收来自用户的输入,并且可以向控制器120发送指示接收到的用户输入的信号。在一些实施例中,用户输入138还可以显示从控制器120接收到的指示支撑装置100的各种组件(例如,电源132、电机140、倾斜检测装置142等)的操作的信息。
30.在实施例中,倾斜检测装置142在结构上被配置为检测支撑装置100的方向。例如在实施例中,倾斜检测装置142检测支撑装置100绕y轴的方向,如图1所示。通过检测支撑装置100的方向,倾斜检测装置142可以检测支撑装置100是否在上斜表面上(例如,向上移动)或在下斜表面上(例如,向下移动)。在实施例中,倾斜检测装置142可以包括用于检测支撑装置100的方向的任何适合的装置,并且可以包括,例如但不限于,倾斜传感器、微机电系统(mems)倾角仪、基于摆锤的倾角仪、陀螺倾角仪等。在实施例中,倾斜检测装置142通信地耦合到控制器120,并且可以向控制器120发送指示检测到的支撑装置的倾斜的信号,如本文更详细描述的。
31.在实施例中,电机140可以包括适用于为支撑装置100提供移动性的装置。例如,在实施例中,电机140可以耦合到一个或多个后轮110a、110b(图2b)和/或一个或多个前轮108a、108b(图2b),并且可以在结构上被配置为旋转后轮110a、110b(图2b)和/或前轮108a、108b(图2b)中的一个或多个车轮。例如但不限于,电机140可以包括直流(dc)电机,和交流(ac)电机等。电机140可以通信地耦合到控制器120,使得可以向控制器120发送信号以及接收来自控制器120的信号。例如,电机140可以接收来自控制器120的信号,引导电机140启动,旋转后轮110a、110b(图2b)和/或前轮108a、108b(图2b)中的一个或多个车轮。在一些实施例中,电机140电耦合到电源132并且电机140可以由电源132供电。
32.参考图1、图3和图4,现在将描述支撑装置100的示例操作。在实施例中,控制器120可以接收来自距离传感器130的指示支撑装置100行进的距离的信号。控制器120可以至少部分地基于检测到的支撑装置100行进的距离来向电源132发送接合电刺激电极134a、134b、134c、134d、136a、136b、136c、136d中的一个或多个电刺激电极的信号。例如,在一些
实施例中,支撑装置100行进的距离越大,电刺激电极134a、134b、134c、134d、136a、136b、136c、136d中的一个或多个电刺激电极接合的次数越大。然而,在一些实施例中,支撑装置100行进的距离越小,电刺激电极134a、134b、134c、134d、136a、136b、136c、136d中的一个或多个电刺激电极接合的次数越少。作为一个示例,在一些实施例中,控制器120可以根据确定的步数来向电源132发送接合电刺激电极134a、134b、134c、134d、136a、136b、136c、136d中的一个或多个电刺激电极的信号,所述步数将由用户用来行进检测到的支撑装置100行进的距离。
33.例如,在一些实施例中,控制器120可以接收指示用户的估计步长的信号。控制器120可以接收来自用户输入138的信号,例如,指示用户的估计步长。在一些实施例中,用户可以经由用户输入138输入估计步长。在一些实施例中,用户可以输入特征,例如,控制器120可以根据该特征确定估计步长。作为一个示例,用户可以经由用户输入138输入用户的身高,并且控制器120可以至少部分地基于输入的用户的身高来确定估计步长。
34.控制器120可以确定与检测到的支撑装置100行进的距离相关联的步数,并且可以至少部分地基于确定的步数来向电源132发送接合一个或多个电刺激电极134a、134b、134c、134d、136a、136b、136c、136d的信号。
35.在一些实施例中,控制器120可以引导电源132以交替的方式接合一个或多个电刺激电极134a、134b、134c、134d、136a、136b、136c、136d以模拟用户的步态。例如,在一些实施例中,控制器120可以向电源132发送接合第一电刺激电极134a、134b、136a、136b的信号,其中第一电刺激电极134a、134b、136a、136b与用户的第一条腿接合。在向电源132发送接合第一电刺激电极134a、134b、136a、136b的信号之后,控制器120可以向电源132发送接合第二电刺激电极134c、134d、136c、136d的信号,其中第二电刺激电极134c、134d、136c、136d与用户的第二条腿接合。
36.作为一个示例并参考图2b、图3和图4,在一些实施例中,控制器120可以引导电源132接合与用户的第一条腿接合的一个或多个电刺激电极。例如并如图4所示,描述了示出一个或多个电刺激电极134a、134b、134c、134d、136a、136b、136c、136d的接合定时和强度的图表。特别地,图表示出了从步态“0sl”的开始到步态“1sl”的结束的接合定时,并且示出了一个或多个电刺激电极134a、134b、134c、134d、136a、136b、136c、136d的接合功率水平,范围从“0”到“mc”。如图4所示,可以接合第一股四头肌电刺激电极134a、第一臀肌电刺激电极134b、第一胫骨电刺激电极136a,和/或第一小腿电刺激电极136b。在接合与用户的第一条腿接合的一个或多个电极之后,控制器120可以引导电源132接合与用户的第二条腿接合的一个或者多个电刺激电极。例如,可以接合第二股四头肌电刺激电极134d、第二臀肌电刺激电极134c、第二胫骨电刺激电极136d和/或第二小腿电刺激电极136c。
37.作为一个示例并如图4所示,在一些实施例中,用户的第一条腿中的用户的臀大肌和/或腘绳肌可以在激活第一臀肌电刺激电极134b(图2b)时收缩。在激活第一臀肌电刺激电极134b(图2b)之后,用户的第二条腿中的用户的臀大肌可以在激活第二臀肌电刺激电极134c(图2b)时收缩。通过交替地接合与用户的第一条腿和第二条腿接合的电刺激电极,用户的肌肉可以以类似于步行步态的方式收缩。
38.在一些实施例中,控制器120可以引导电源134以不同功率水平接合一个或多个电刺激电极134a、134b、134c、134d、136a、136b、136c、136d。不受理论束缚,一个或多个电刺激
电极134a、134b、134c、134d、136a、136b、136c、136d接合的功率水平(例如,电强度)与用户的肌肉收缩的强度相关联。例如,与以相对低的功率水平接合电刺激电极134a、134b、134c、134d、136a、136b、136c、136d中的一个或多个电刺激电极相比,以相对高的功率水平接合电刺激电极134a,134b,134c,134d,136a,136b,136c,136d中一个或多个电刺激电极可以使得相对大的肌肉收缩。
39.例如并参考图3和图4,在一些实施例中,控制器120向电源132发送以第一功率水平接合一个或多个电刺激电极134a,134b,134c,134d,136a,136b,136c,136d中的第一电刺激电极的信号。在向电源132发送以第一功率水平接合一个或多个电刺激电极134a,134b,134c,134d,136a,136b,136c,136d中的第一电刺激电极的信号之后,控制器120可以向电源132发送以不同于第一功率水平的第二功率水平接合一个或多个电刺激电极134a,134b,134c,134d,136a,136b,136c,136d中的第一电刺激电极的信号。
40.作为一个示例并参考图4,在一些实施例中,控制器120向电源132发送在步态“0”的开始以第一功率水平接合第一臀肌电刺激电极134b的信号。在以第一功率水平接合第一臀肌电刺激电极134b之后,控制器120向电源132发送以不同于第一功率水平的第二功率水平接合第一臀肌电刺激电极134b的信号。例如并如图4所示,在一些实施例中,与第一臀肌电刺激电极134b以大于功率水平0.5mc的功率水平mc接合的步态“0”的开始相比,在中间步态(例如,0.5sl),第一臀肌电刺激电极134b以功率水平0.5mc接合。如图4中进一步所示,一个或多个电刺激电极134a、134b、134c、134d、136a、136b、136c、136d中的每一个电刺激电极可以在步态中的不同点以不同的功率水平接合,从而以类似于用户正在行走的方式改变肌肉的收缩水平。
41.在一些实施例中,一个或多个电刺激电极134a、134b、134c、134d、136a、136b、136c、136d中的一个电刺激电极的功率水平(例如,接合的强度)至少部分地基于检测到的支撑装置100的倾斜,例如,由倾斜检测装置142检测。作为一个示例,响应于接收到来自倾斜检测装置142的支撑装置100处于正倾斜(例如,支撑装置100正在上坡)的信号,控制器120可以引导电源132以相对高的功率水平接合电刺激电极134a、134b、134c、134d、136a、136b、136c、136d中的一个或多个电刺激电极。响应于接收到来自倾斜检测装置142的支撑装置100处于负倾斜(例如,支撑装置100正在下坡行进)的信号,控制器120可以引导电源132以相对低的功率水平接合电刺激电极134a、134b、134c、134d、136a、136b、136c、136d中的一个或多个电刺激电极,其中相对低的强度低于相对高的功率水平。以这种方式,支撑装置100可以根据支撑装置100穿过的地形(例如,上坡或下坡)来模拟用户的肌肉的接合。
42.现在应当理解,本文所述实施例涉及包括电刺激电极的支撑装置。在实施例中,可以至少部分地基于支撑装置行进的距离激活电刺激电极。通过至少部分地基于支撑装置行进的距离激活电刺激电极,可以以类似于用户要行走支撑装置行进的距离的方式收缩用户的腿部。通过以这种方式收缩用户的腿部肌肉,与不刺激和收缩用户的腿部肌肉的支撑装置相比,可以减少肌肉萎缩。
43.在详细描述了本公开的主题并参考具体实施例之后,应当注意,本公开中所述各种细节不应被理解为暗示这些细节涉及本公开中所述各种实施例的必要组件的元件,即使在伴随本说明书的每个附图中示出了特定元件的情况下。相反,所附权利要求应当被视为本公开的广度和本公开中所述各种实施例的相应范围的唯一表示。此外,本领域技术人员
应当清楚,在不脱离所要求保护的主题的精神和范围的情况下,可以对所述实施例进行各种修改和变化。因此,本说明书旨在涵盖所述各种实施例的修改和变化,前提是这种修改和变化落入所附权利要求及其等同物的范围内。
44.应当注意,与预期用途的表述相反,本文以特定方式“在结构上被配置”为实现特定属性或以特定方式起作用的本公开的组件的陈述是结构表述。更具体地说,本文对组件“在结构上被配置”的方式的引用表示组件的现有物理条件,并且因此,应视为组件的结构特征的明确表述。
45.应当注意,“优选地”、“通常地”和“典型地”之类的术语,在本文中使用时,不用于限制所要求保护的发明的范围或暗示某些特征对于所要求保护的发明的结构或功能是关键的、必要的或甚至重要的。相反,这些术语仅旨在标识本公开的实施例的特定方面,或强调在本公开的特定实施例中可以使用或不使用的替代或附加特征。
46.为了描述和定义本发明,应当注意,术语“基本上”和“大约”在本文用于表示可归因于任何定量比较、值、测量或其他表示的固有不确定性程度。本文还使用术语“基本上”和“大约”来表示定量可以与所述参考不同的程度,而不会导致所讨论主题的基本功能发生变化。
47.应当注意,以下权利要求中的一项或多项权利要求使用术语“其中”作为过渡短语。为了定义本发明,应当注意,该术语在权利要求中被引入作为一个开放式过渡短语,用于引入结构的一系列特征的表述,并且应当以与更常用的开放式前导词术语“包括”类似的方式来解释。
48.所要求保护的是:
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
