1.本发明涉及隧道无人机灭火控制技术领域,尤其涉及一种用于长大交通隧道火灾的无人平台。
背景技术:
2.我国的长大交通隧道数量巨大,长度10公里的交通隧道也较为常见,若这类隧道中出现较大规模火灾时,采用无人机投放灭火弹是一种较为及时的灭火技术方案,但在隧道中如果出现大量高温浓烟、可见度极低时,且在隧道中的障碍情况复杂,导致不能正常自动化避障,无人机有可能不能够正常的快速飞行至火源实施灭火。因此,对现有的隧道无人灭火技术存在很大的改进空间。
技术实现要素:
3.本发明的目的是要提供一种用于长大交通隧道火灾的无人平台。
4.为达到上述目的,本发明是按照以下技术方案实施的:
5.本发明包括灭火弹投射无人机和移动行走平台,所述灭火弹投射无人机位于所述移动行走平台上,所述灭火弹投射无人机上搭载有自动避障飞控系统,所述移动行走平台上搭载有自动避障行走驱动系统。
6.进一步,所述移动行走平台包括行走平台外壳体、行走驱动控制模块和信号传输天线,所述灭火弹投射无人机位于所述行走平台外壳体的上端面,所述行走驱动控制模块和所述信号传输天线设置于所述行走平台外壳体上,所述信号传输天线与所述行走驱动控制模块的信号传输端电性连接,所述自动避障行走驱动系统设置于所述行走平台外壳体的下端,所述行走驱动控制模块的控制信号传输端与所述自动避障行走驱动系统电性连接。
7.具体地,所述自动避障行走驱动系统包括行走驱动轮、平衡辅助轮、转向驱动轮和温度与障碍传感器,所述行走驱动轮设置于所述行走平台外壳体的下端中部,所述平衡辅助轮设置于所述行走平台外壳体的下端一侧,所述转向驱动轮设置于所述行走平台外壳体的下端另一侧,所述温度与障碍传感器设置于所述行走平台外壳体的一端,所述温度与障碍传感器的信号输出端与所述行走驱动控制模块的信号输入端连接,所述行走驱动控制模块的控制信号输出端分别与所述行走驱动轮和所述转向驱动轮连接。
8.进一步,所述灭火弹投射无人机包括折叠机架、灭火弹投射器连接架,所述灭火弹投射器连接架设置于所述折叠机架的下端,所述灭火弹投射器连接架连接灭火弹投射装置,所述自动避障飞控系统设置于所述折叠机架上,所述自动避障飞控系统的控制信号输出端分别与所述折叠机架和所述灭火弹投射器连接架电性连接。
9.具体地,所述折叠机架包括固定螺旋桨支架和折叠螺旋桨支架,所述固定螺旋桨支架的一端与所述自动避障飞控系统固定连接,所述固定螺旋桨支架的另一端连接螺旋桨,所述折叠螺旋桨支架为两个,两个所述折叠螺旋桨支架的一端与所述自动避障飞控系统通过电动驱动电机转动连接,所述折叠螺旋桨支架的另一端连接螺旋桨。
10.具体地,所述自动避障飞控系统包括无人机飞控模块和无人机障碍传感器组,所述无人机飞控模块的侧边一端与所述固定螺旋桨支架固定连接,所述无人机飞控模块的两侧与所述折叠螺旋桨支架转动连接,所述无人机障碍传感器组设置于所述无人机飞控模块的前端。
11.本发明所述用于长大交通隧道火灾的无人平台的控制方法:灭火弹投弹无人机能够直接到达火源时,灭火弹投弹无人机离开移动行走平台直接到达火源发射灭火弹进行灭火,当隧道内顶部浓烟等情况导致灭火弹投弹无人机不能直接到达时,灭火弹投弹无人机下降至移动行走平台上,通过移动行走平台带动无人机行走接近火源。
12.本发明的有益效果是:
13.本发明是一种用于长大交通隧道火灾的无人平台,与现有技术相比,本发明通过无人机与地面行走的移动平台配合,在隧道内能够增加无人机的应变能力,在能够飞行时进行飞行,不能进行飞行时通过行走平台带动无人机行走,并且无人机与行走平台均携带障碍、环境温度等传感器,实现灵活自动应变障碍,尤其适用于长大隧道中遥控信号较弱的场景进行灭火弹精准投放,具有推广应用的价值。
附图说明
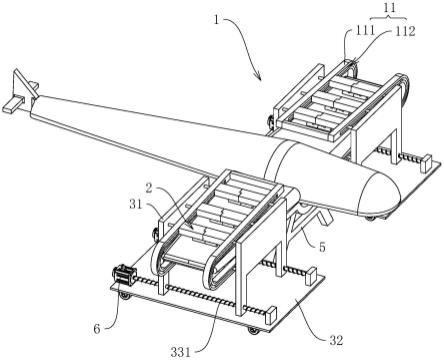
14.图1是本发明的结构示意图;
15.图2是本发明的灭火弹投射无人机结构示意图;
16.图3是本发明的移动行走平台结构示意图。
17.图中:行走平台外壳体1、行走驱动轮2、平衡辅助轮3、转向驱动轮4、温度与障碍传感器5、行走驱动控制模块6、信号传输天线7、无人机飞控模块8、固定螺旋桨支架9、灭火弹投射器连接架10、折叠螺旋桨支架11、无人机障碍传感器组12。
具体实施方式
18.下面结合附图以及具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
19.如图1-3所示:本发明包括灭火弹投射无人机和移动行走平台,所述灭火弹投射无人机位于所述移动行走平台上,所述灭火弹投射无人机上搭载有自动避障飞控系统,所述移动行走平台上搭载有自动避障行走驱动系统。
20.进一步,所述移动行走平台包括行走平台外壳体1、行走驱动控制模块6和信号传输天线7,所述灭火弹投射无人机位于所述行走平台外壳体1的上端面,所述行走驱动控制模块6和所述信号传输天线7设置于所述行走平台外壳体1上,所述信号传输天线7与所述行走驱动控制模块6的信号传输端电性连接,所述自动避障行走驱动系统设置于所述行走平台外壳体1的下端,所述行走驱动控制模块6的控制信号传输端与所述自动避障行走驱动系统电性连接。
21.具体地,所述自动避障行走驱动系统包括行走驱动轮2、平衡辅助轮3、转向驱动轮4和温度与障碍传感器5,所述行走驱动轮2设置于所述行走平台外壳体1的下端中部,所述平衡辅助轮3设置于所述行走平台外壳体1的下端一侧,所述转向驱动轮4设置于所述行走平台外壳体1的下端另一侧,所述温度与障碍传感器5设置于所述行走平台外壳体1的一端,
所述温度与障碍传感器5的信号输出端与所述行走驱动控制模块6的信号输入端连接,所述行走驱动控制模块6的控制信号输出端分别与所述行走驱动轮2和所述转向驱动轮4连接。
22.进一步,所述灭火弹投射无人机包括折叠机架、灭火弹投射器连接架10,所述灭火弹投射器连接架10设置于所述折叠机架的下端,所述灭火弹投射器连接架10连接灭火弹投射装置,所述自动避障飞控系统设置于所述折叠机架上,所述自动避障飞控系统的控制信号输出端分别与所述折叠机架和所述灭火弹投射器连接架10电性连接。
23.具体地,所述折叠机架包括固定螺旋桨支架9和折叠螺旋桨支架11,所述固定螺旋桨支架9的一端与所述自动避障飞控系统固定连接,所述固定螺旋桨支架9的另一端连接螺旋桨,所述折叠螺旋桨支架11为两个,两个所述折叠螺旋桨支架11的一端与所述自动避障飞控系统通过电动驱动电机转动连接,所述折叠螺旋桨支架11的另一端连接螺旋桨。
24.具体地,所述自动避障飞控系统包括无人机飞控模块8和无人机障碍传感器组12,所述无人机飞控模块8的侧边一端与所述固定螺旋桨支架9固定连接,所述无人机飞控模块8的两侧与所述折叠螺旋桨支架11转动连接,所述无人机障碍传感器组12设置于所述无人机飞控模块8的前端。
25.本发明所述用于长大交通隧道火灾的无人平台的控制方法:灭火弹投弹无人机能够直接到达火源时,灭火弹投弹无人机离开移动行走平台直接到达火源发射灭火弹进行灭火,当隧道内顶部浓烟等情况导致灭火弹投弹无人机不能直接到达时,灭火弹投弹无人机下降至移动行走平台上,通过移动行走平台带动无人机行走接近火源。
26.本发明的工作原理如下:
27.当隧道内较为空旷、浓烟较少时,可通过展开灭火弹投射无人机,通过折叠螺旋桨支架11与无人机飞控模块8连接的电动驱动转轴展开两个折叠螺旋桨支架11即可,灭火弹投射无人机快速飞行至火源目标处,通过与灭火弹投射器连接架10连接的灭火弹投射装置投射灭火弹进行灭火。当隧道上部汇聚了大量高温浓烟时,灭火弹投射无人机上的无人机障碍传感器组12感应到无法通过,灭火弹投射无人机通过无人机飞控模块8控制自行下降,回到行走平台外壳体1上,移动行走平台通过行走驱动控制模块6控制行走驱动轮2驱动,通过行走驱动控制模块6控制转向驱动轮4改变方向,通过温度与障碍传感器5感知障碍物、高温环境等情况,行走驱动控制模块6通过信号传输天线7传输信号至遥控中心实时监控,当移动行走平台携带的温度与障碍传感器5监测到环境参数超过临界阈值时停止前进。在尽可能靠近目标处由灭火弹投射无人机发射灭火弹,然后快速返回。
28.本发明的技术方案不限于上述具体实施例的限制,凡是根据本发明的技术方案做出的技术变形,均落入本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。