技术特征:
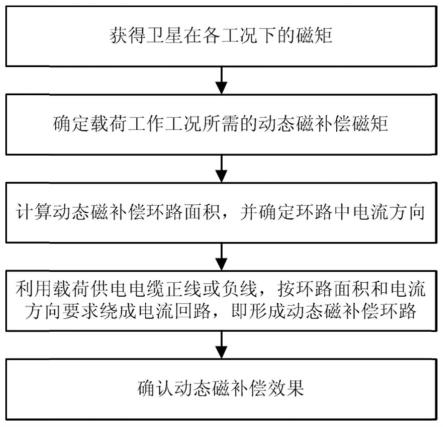
1.一种卫星动态磁补偿方法,其特征在于,包括:步骤s1:对卫星进行磁测试,获得卫星在各工况下的磁矩;步骤s2:确定载荷工作工况所需的动态磁补偿磁矩,使得补偿后载荷工作工况下的磁矩处于其他工况下的磁矩形成的区间内;步骤s3:根据动态磁补偿磁矩和载荷工作工况下载荷供电电流,计算动态磁补偿环路面积,确定环路电流方向;步骤s4:根据载荷供电电缆正线或负线,按环路面积和电流方向要求绕成电流回路,形成动态磁补偿环路;步骤s5:对卫星进行磁测试,确认动态磁补偿效果。2.根据权利要求1所述的卫星动态磁补偿方法,其特征在于,在所述步骤s1中:记卫星在各工况下的磁矩为{m
xi
,m
yi
,m
zi
|i=1,2,
…
,n};其中,m
xi
,m
yi
,m
zi
为卫星在工况i下的磁矩在x、y、z三个正交轴上的分量;n为工况数,记i=l为载荷工作工况,为其他工况;载荷为间歇工作,载荷工作工况下载荷开机,而其他工况下载荷关机。3.根据权利要求1所述的卫星动态磁补偿方法,其特征在于,在所述步骤s2中:选取一组动态补偿磁矩使得补偿后载荷工作工况下的磁矩位于其他工况下的磁矩所形成的区间内,满足:的区间内,满足:的区间内,满足:其中,分别为动态补偿磁矩在x、y、z三个正交轴上的分量;m
xl
、m
yl
、m
zl
分别为补偿前卫星在载荷工作工况下,即i=l时的磁矩在x、y、z三个正交轴上的分量;分别为除载荷工作工况外的其他工况,即时磁矩在x、y、z三个正交轴上分量的最小值;矩在x、y、z三个正交轴上分量的最小值;分别为除载荷工作工况外的其他工况,即时磁矩在x、y、z三个正交轴上分量的最大值;动态补偿磁矩影响载荷工作工况下的磁矩,对其他工况下的磁矩无影响。4.根据权利要求1所述的卫星动态磁补偿方法,其特征在于,在所述步骤s3中:根据动态补偿磁矩和载荷工作工况下其供电电缆中流经的电流i,计算x、y、z三正交轴上的动态磁补偿环路的面积分别为:计算x、y、z三正交轴上的动态磁补偿环路的面积分别为:
其中,s
x
、s
y
、s
z
分别为x、y、z三个正交轴上的动态磁补偿环路的面积;i为载荷工作工况下其供电电缆中流经的电流;|
·
|表示取绝对值;各轴上环路中电流的方向根据其电流产生的磁矩的方向与动态补偿磁矩在该轴上的分量的方向一致进行确定。5.根据权利要求1所述的卫星动态磁补偿方法,其特征在于,在所述步骤s4中:将载荷供电电缆正负线局部分开,利用正线或负线按所述步骤s3确定的环路面积和电流方向在x、y、z三正交轴上分别绕成电流回路,所述电流回路为动态磁补偿环路;单个轴上的动态磁补偿环路为单个或多个,对于多个环路,各环路面积之和为所述步骤s3中确定的环路面积,各环路中的电流方向与所述步骤s3确定的电流方向一致;动态磁补偿环路由载荷供电电缆绕成,载荷工作时,环路中电流产生磁矩,且磁矩大小随环路中电流增加而变大;载荷不工作时,环路中无电流,不产生磁矩;动态磁补偿环路实现对载荷工作工况的动态磁补偿,对其他工况下的磁矩无影响。6.一种卫星动态磁补偿系统,其特征在于,包括:模块m1:对卫星进行磁测试,获得卫星在各工况下的磁矩;模块m2:确定载荷工作工况所需的动态磁补偿磁矩,使得补偿后载荷工作工况下的磁矩处于其他工况下的磁矩形成的区间内;模块m3:根据动态磁补偿磁矩和载荷工作工况下载荷供电电流,计算动态磁补偿环路面积,确定环路电流方向;模块m4:根据载荷供电电缆正线或负线,按环路面积和电流方向要求绕成电流回路,形成动态磁补偿环路;模块m5:对卫星进行磁测试,确认动态磁补偿效果。7.根据权利要求6所述的卫星动态磁补偿系统,其特征在于,在所述模块m1中:记卫星在各工况下的磁矩为{m
xi
,m
yi
,m
zi
|i=1,2,
…
,n};其中,m
xi
,m
yi
,m
zi
为卫星在工况i下的磁矩在x、y、z三个正交轴上的分量;n为工况数,记i=l为载荷工作工况,为其他工况;载荷为间歇工作,载荷工作工况下载荷开机,而其他工况下载荷关机。8.根据权利要求6所述的卫星动态磁补偿系统,其特征在于,在所述模块m2中:选取一组动态补偿磁矩使得补偿后载荷工作工况下的磁矩位于其他工况下的磁矩所形成的区间内,满足:的区间内,满足:的区间内,满足:其中,分别为动态补偿磁矩在x、y、z三个正交轴上的分量;m
xl
、
m
yl
、m
zl
分别为补偿前卫星在载荷工作工况下,即i=l时的磁矩在x、y、z三个正交轴上的分量;分别为除载荷工作工况外的其他工况,即时磁矩在x、y、z三个正交轴上分量的最小值;矩在x、y、z三个正交轴上分量的最小值;分别为除载荷工作工况外的其他工况,即时磁矩在x、y、z三个正交轴上分量的最大值;动态补偿磁矩影响载荷工作工况下的磁矩,对其他工况下的磁矩无影响。9.根据权利要求6所述的卫星动态磁补偿系统,其特征在于,在所述模块m3中:根据动态补偿磁矩和载荷工作工况下其供电电缆中流经的电流i,计算x、y、z三正交轴上的动态磁补偿环路的面积分别为:计算x、y、z三正交轴上的动态磁补偿环路的面积分别为:计算x、y、z三正交轴上的动态磁补偿环路的面积分别为:其中,s
x
、s
y
、s
z
分别为x、y、z三个正交轴上的动态磁补偿环路的面积;i为载荷工作工况下其供电电缆中流经的电流;|
·
|表示取绝对值;各轴上环路中电流的方向根据其电流产生的磁矩的方向与动态补偿磁矩在该轴上的分量的方向一致进行确定。10.根据权利要求6所述的卫星动态磁补偿系统,其特征在于,在所述模块m4中:将载荷供电电缆正负线局部分开,利用正线或负线按所述模块m3确定的环路面积和电流方向在x、y、z三正交轴上分别绕成电流回路,所述电流回路为动态磁补偿环路;单个轴上的动态磁补偿环路为单个或多个,对于多个环路,各环路面积之和为所述模块m3中确定的环路面积,各环路中的电流方向与所述模块m3确定的电流方向一致;动态磁补偿环路由载荷供电电缆绕成,载荷工作时,环路中电流产生磁矩,且磁矩大小随环路中电流增加而变大;载荷不工作时,环路中无电流,不产生磁矩;动态磁补偿环路实现对载荷工作工况的动态磁补偿,对其他工况下的磁矩无影响。
技术总结
本发明提供了一种卫星动态磁补偿方法及系统包括:对卫星进行磁测试,获得卫星在各工况下的磁矩;确定载荷工作工况所需的动态磁补偿磁矩,使得补偿后载荷工作工况下的磁矩处于其他工况下的磁矩形成的区间内;根据动态磁补偿磁矩和载荷工作工况下载荷供电电流,计算动态磁补偿环路面积,确定环路电流方向;根据载荷供电电缆正线或负线,按环路面积和电流方向要求绕成电流回路,形成动态磁补偿环路;对卫星进行磁测试,确认动态磁补偿效果。本发明解决了利用永磁材料对卫星进行静态磁补偿时,无法有效补偿载荷间歇工作时卫星的动态磁矩的问题。本发明无需卫星额外配置主动磁补偿设备,具有简单、经济、可有效动态补偿载荷工作时的磁矩的优点。的磁矩的优点。的磁矩的优点。
技术研发人员:陈筠力 肖文斌 俞佳江 周宇 曹权 陈树海 韦锡峰 秦冉冉 李庆
受保护的技术使用者:上海卫星工程研究所
技术研发日:2022.10.11
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。