1.本发明涉及架空输电线路塔架检测技术领域,具体是一种基于激光点云数据的电力线塔架自动检测方法。
背景技术:
2.目前,高压电塔是电力线架空悬挂避免近地物干扰、实现远距离电力传输的电力走廊的重要组成部分,其安全稳定性对输电线路至关重要。传统的输电线路安全巡检需要工作人员定期进行,工作效率低,劳动强度大。随着机载激光扫描技术的发展,采用无人机进行输电走廊的安全巡检成为一种全新的模式。机载lidar获取的点云数据中含有大量的干扰信息,因此需采用预处理、识别分类等操作,将电塔、电力线等相关信息提取处理,进而为电力管理人员的安全分析提供数据。
3.现在最常用的自动检测方法是监督分类器法,其使用随机森林或jointboost等机器学习算法将电力线塔架分类为单独类别,来实现塔架的自动检测。监督分类器法通常需要满足两个主要要求:大量训练数据集和平衡学习。
4.但对于给定的测试场景,很难获取塔架的大量训练数据集,并且与树木、建筑物和电线相比,塔架属于少数类别,对于不平衡数据集,监督分类器法倾向于学习少数类的错误分类,很难实现电力线塔架的精确检测。
技术实现要素:
5.本发明的目的在于提供一种基于激光点云数据的电力线塔架自动检测方法,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:
7.一种基于激光点云数据的电力线塔架自动检测方法,包括以下步骤:
8.s1:获取输电线路激光雷达点云数据;
9.s2:将点云数据分类或分割成不同对象,在表示电力线组件、塔架和树木的非地面点创建电力线掩码和塔架掩码;
10.s3:通过对比树木和塔架之间的面积、形状和对称性,移除塔架掩码中的树木;
11.s4:提取电力线掩码中连接塔架的导线,并根据导线两端位置移除塔架掩码中剩余的树木,从而检测到塔架位置。
12.优选地,步骤s2具体为:
13.首先从点云数据中生成dtm数字地形模型,对于每个lidar点,使用相应的dtm高度作为地面高度hg,高度阈值th应满足:
14.th=hg hcꢀꢀꢀ
(1)
15.其中,hc代表高度常量,用于将点云低高度对象与高高度对象区分开,为了获取大部分塔架lidar点,设置一个高度阈值,然后应用高度阈值将激光雷达点云分为两组:低于高度阈值的地面点以及高于高度阈值的非地面点;
16.最后在表示电力线组件、塔架和树木的非地面点创建两个二进制掩码:电力线掩码mm和塔架掩码m
p
;
17.其中,电力线掩码mm:包含电力线组件和树木,以及连续的塔架与电力线连接的位置;塔架掩码m
p
:包含不连续的塔架。
18.优选地,步骤s3具体为:
19.首先使用matlab带宽复合函数bwconncomp对塔架掩码m
p
进行组件分析,大于预定义阈值的组件ta作为树木被移除;然后将lidar点以db=2m为间隔划分为六个直方图条柱,bi(1<<i<<6)代表直方图条柱中点数,当条柱中点数bi为0时,相应的组件将作为树和噪声直接被移除;最后根据塔架对称性、塔架掩码组件的六个直方图条柱点数bi基本相同的特点,移除塔架掩码m
p
剩余的树木。
20.优选地,步骤s4具体为:
21.在高度范围2~12m内,首先采用canny边缘算法检测长度lm≥6m的电力线边缘,移除短于6m的边缘线;然后在使用高斯卷积滤波器对提取的电力边缘线进行平滑处理后,采用弦到点距离累计方法在平滑曲线γ(t)=(x(t),y(t)),1≤t≤n
p
上测量平滑曲线各点p1,p2,p3,...p
np
处和弦长度,累加所有距离计算平滑曲线各点的离散曲率h
l
(q):
[0022][0023]
其中d
q,j
为平滑曲线各点和弦长度距离,曲率函数h
l
(q)中极值点为电力线角点;
[0024]
最后在每个提取的电力线边缘上的两个连续角点之间拟合直线mm后,应用在附近的候选塔架之间,如果未找到相邻的候选塔架,则作为树木被移除。
[0025]
优选地,创建所述电力线掩码mm步骤如下:
[0026]
首先设置lidar点中所有初始像素为1,然后对于每个非地面点,掩码中的相应像素标记为0,为防止电力线上单个物体在掩码中失真通常设置电力线掩码的分辨率rm为0.25m,最后对于每个非地面点,都应满足领域ω=n
×
n:
[0027]
n=2n 1
ꢀꢀꢀ
(2)
[0028]
其中领域内点填充标记为0,n应满足:
[0029][0030]
式中|
·
|表示循环操作,rw定义如下:
[0031][0032]
式中dm是电力线上最大点到点距离,一般情况下dm最小值设置为0.5,n≥1,确保输电线路中任何一对连续塔架被连接。
[0033]
优选地,所述塔架掩码m
p
在仅限于低于高度th=12m的非地面点,使用与电力线掩码创建方法相同的方法创建。
[0034]
优选地,利用点云数据采集设备获取输电线路激光雷达点云数据,所述点云数据采集设备包括激光测距系统、全球定位系统、惯性导航系统和无人机;对于架空线路环境,采用无人机机载激光雷达采集不同区段的点云数据。
[0035]
与现有技术相比,本发明的有益效果是:
[0036]
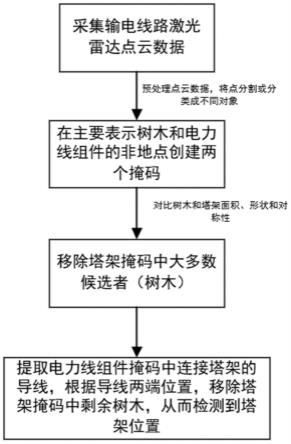
1、先通过获取输电线路激光雷达点云数据,预处理点云数据,将点分类或分割成不同对象,在主要代表树木和电力线组件的非地面点创建两个掩码,再通过对比树木和塔架之间的面积、形状和对称性,移除塔架掩码中大多数假候选者(树木),最后提取电力线掩码中连接塔架的导线,并根据导线两端位置移除塔架掩码中剩余的树木,从而检测到塔架位置。
[0037]
2、解决了使用传统分类器针对少数类错误分类问题,通过在非地面点生成二进制掩码,充分结合了基于点和基于网络处理点云数据优点,不仅加快从点云数据中自动检测塔架的处理速度,而且通过捕获和利用塔架的3d对称特性的优势,提高了塔架检测的准确性和完整性。
附图说明
[0038]
图1为本发明的流程结构示意框图;
[0039]
图2为本发明的机载激光雷达系统采集激光点云原理图。
具体实施方式
[0040]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0041]
请参阅图1和图2,本发明实施例中,一种基于激光点云数据的电力线塔架自动检测方法,所述方法包括以下步骤:
[0042]
1)获取输电线路激光雷达点云数据;
[0043]
其中,步骤1)中,输电线路激光雷达点云数据采集需要用到的设备材料包括激光测距系统、全球定位系统、惯性导航系统、无人机等。机载激光雷达通过激光测距系统向架空线路现场主动发射高频率的激光脉冲,不仅可以快速获取输电线路的三维坐标,能穿透植被直接获取地表信息,生成高密度的三维空间点云数据,还可从不同视角对这些点云进行三维显示、量测,具有高自动化、高精度及作业成本低等优点。
[0044]
2)预处理点云数据,将点分类或分割成不同对象,在主要代表树木和电力线组件的非地面点创建两个掩码;
[0045]
其中,步骤2)中,使用lidar360专业软件从激光雷达点云数据中生成dtm数字地形模型,对于每个lidar点,使用相应的dtm高度作为地面高度hg,高度阈值th应满足:
[0046]
th=hg hcꢀꢀꢀ
(1)
[0047]
其中,hc代表高度常量,用于将激光点云低高度对象与高高度对象区分开,为了获取大部分塔架lidar点通常设置高度常量hc为1m。然后应用高度阈值将激光雷达点云分为两组:地面点以及非地面点;
[0048]
地面点:低于高度阈值的对象例如地面、道路、家具和灌木丛等;
[0049]
非地面点:高于高度阈值的对象例如电线、塔架和树木等;
[0050]
最后在主要表示电力线组件、塔架和树木的非地面点创建两个二进制掩码:电力
线掩码mm和塔架掩码m
p
;
[0051]
电力线掩码mm:主要包含电力线组件和树木,以及连续的塔架与电力线连接的位置。创建电力线掩码mm步骤如下首先设置lidar点中所有初始像素为1(白色),然后对于每个非地面点,掩码中的相应像素标记为0(黑色),为防止电力线上单个物体在掩码中失真通常设置电力线掩码的分辨率rm为0.25m,最后对于每个非地面点,都应满足领域ω=n
×
n:
[0052]
n=2n 1
ꢀꢀꢀ
(2)
[0053]
其中领域内点填充标记为0(黑色),n应满足:
[0054][0055]
式中|
·
|表示循环操作,rw定义如下:
[0056][0057]
式中dm是电力线上最大点到点距离,一般情况下dm最小值设置为0.5,n≥1,确保输电线路中任何一对连续塔架被连接。
[0058]
塔架掩码m
p
:主要包含不连续的塔架。为获得不连续的塔架,塔架掩码m
p
在仅限于低于特定高度th=12m的非地面点使用上述相同电力线掩码方法创建。
[0059]
3)通过对比树木和塔架之间的面积、形状和对称性,移除塔架掩码中大多数假候选者(树木);
[0060]
其中,步骤3中)中,使用matlab带宽复合函数bwconncomp对塔架掩码m
p
进行组件分析,大于预定义阈值的组件ta作为树木被移除;然后将lidar点以db=2m为间隔划分为六个直方图条柱,bi(1<<i<<6)代表直方图条柱中点数,当条柱中点数bi为0时,相应的组件将作为树和噪声直接被移除;最后根据塔架对称性、塔架掩码组件的六个直方图条柱点数bi基本相同的特点,移除塔架掩码m
p
剩余的树木。
[0061]
4)提取电力线掩码中连接塔架的导线,并根据导线两端位置移除塔架掩码中剩余的树木,从而检测到塔架位置。
[0062]
其中,步骤4)中,在使用步骤1、2、3)移除大多数树木后,在给定高度范围2~12m内,塔架掩码中仍存在一些具有塔架相似特征的树木。要移除塔架掩码中剩余树木具体步骤包括首先采用canny边缘算法检测长度lm≥6m的电力线边缘,移除短于6m的边缘线;然后在使用高斯卷积滤波器对提取的电力边缘线进行平滑处理后,采用弦到点距离累计方法在平滑曲线γ(t)=(x(t),y(t)),1≤t≤n
p
上测量平滑曲线各点p1,p2,p3,...p
np
处和弦长度,累加所有距离计算平滑曲线各点的离散曲率h
l
(q):
[0063][0064]
其中d
q,j
为平滑曲线各点和弦长度距离,曲率函数h
l
(q)中极值点为电力线角点。
[0065]
最后在每个提取的电力线边缘上的两个连续角点之间拟合直线mm后,应用在附近的候选塔架之间,如果未找到相邻的候选塔架,则作为树木被移除,通过这次筛选,移除了塔架掩码中剩余的树木,最终存活的塔架掩码为真实塔架。
[0066]
尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,
其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。