1.本发明涉及蚕茧筛选领域,具体地,涉及一种智能选摘茧系统及装备。
背景技术:
2.当前,大部分蚕桑基地仍存在自动化和信息化程度低、人工劳动强度大、生产效率低等特点。特别在选摘茧方面,虽然经过科研人员的努力,开发出摘茧设备可以辅助人工进行较高效率的摘茧,但是这些设备无法完成对蚕茧缺陷(黄斑茧、油茧、双宫茧等)的识别和分选工作。现在蚕茧的分选仍以人工为主,人工工作效率低、主观性强,很难保证对上茧、下茧进行有效的分选,且上茧、下茧混在一起,上茧容易被下茧污染,拉低蚕茧整体的品质,导致优质蚕茧质量与数量受到影响,直接影响到缫丝的质量,严重制约了蚕业发展。
3.选摘茧是蚕茧制丝过程中重要的准备工作之一,原料茧必须进行严格的挑选,剔出混在各批蚕茧中不能缫丝的茧、尚可缫丝的次茧,才能保证生产效率和缫制品质优良的蚕丝。现在摘茧的工作尚有机械化的摘茧机辅助,选茧的工作主要由人工来完成,人工工作主观性强、效率低,但随着社会经济的发展,“劳动密集型”的蚕桑产业难以持续健康发展。蚕桑基地普遍反映养蚕摘茧现代化程度低、劳动力需求大。由于当前农村劳动力成本高,部分合作社、养蚕大户、企业已经出现增产不增收,且规模越大效益越低,蚕桑发展堪忧,急需现代化的蚕桑装备。
技术实现要素:
4.本发明提供了一种智能选摘茧系统及装备,以解决现有技术中所记载的问题。
5.为实现上述目的,本发明提供了如下方案:
6.一种智能选摘茧系统,包括:
7.图像获取模块,获取蚕茧的第一图像;
8.图像预处理模块,对所述第一图像进行预处理,所述预处理包括图像增强和去噪;
9.图像分割模块,将第一图像按照单个蚕茧进行分割,得到若干第二图像;
10.图像定位模块,记录所述第二图像相对于第一图像的第一位置信息;
11.智能分选模块,基于深度迁移网络将第二图像分为上茧图像和下茧图像,并根据上茧图像和下茧图像的第一位置信息将蚕茧进行分离。
12.现有技术中使用人工对蚕茧进行分选,效率低,无法满足“劳动密集型”的蚕桑产业的健康发展,本发明通过图像获取模块、图像预处理模块、图像分割模块、图像定位模块和智能分选模块实现蚕茧的自动分选,提高分选效率,从而提高蚕桑产业的效益;图像获取模块获取蚕茧图像并储存,图像预处理模块对图像进行增强和去噪等,提升蚕茧图像的质量,减少分选的难度,提高分选的准确性,图像分割模块用于将单个蚕茧的图像单独分割,防止蚕茧之间相互干扰,难以定位,并且增加了分选难度,图像定位模块用于将分割开的蚕茧进行定位,以便于在分选后确定各个蚕茧的好坏,也方便将上茧和下茧的分离,智能分选模块则用于上茧和下茧的分离,通过深度迁移网络分辨上茧和下茧,并根据图像定位模块
确定的蚕茧位置信息将上茧和下茧进行分离,实现全程机械化分选,代替人工操作,增加分选效率,从而提高工厂产能和收益。其中,作为本领域专业术语,上茧是指茧形、色泽、茧层厚薄及缩皱正常,无疵点的茧,下茧是指有严重疵点,不能缫丝或很难缫正品生丝的茧。
13.进一步的,获取第一图像之前,将所述蚕茧放入方格簇内,所述第一图像为所述方格簇的整体图像,所述第二图像为所述方格簇上单个格子的图像。
14.方格簇能够将蚕茧束缚在一定的区域内,同时能根据方格的长和宽对蚕茧的放置方向进行限制,减小方格簇上的蚕茧之间的差异性,方便分选,同时方格簇能够为图像分割模块在进行分割时提供分割线路依据,即沿着方格边缘进行分割,防止图像分割错误影响分选的准确性。
15.一种智能选摘茧装备,包括传送装置、第一图像采集装置、方格簇、分选装置,所述传送装置用于传输装有蚕茧的方格簇,所述第一图像采集装置和所述分选装置均安装于所述传送装置上方,所述第一图像采集装置用于获取所述第一图像,所述分选装置用于将所述方格簇上的蚕茧按照上茧和下茧进行分装。
16.本装备只需将装有蚕茧的方格簇放置到传送装置上,传送装置带动方格簇移动,经过第一图像采集装置下方时,第一图像采集装置上的图像获取模块获取方格簇及蚕茧的图像,再经图像预处理模块、图像分割模块和图像定位模块将图像进行处理,得到相应的上茧和下茧图像的位置信息并传递给分选装置,当方格簇移动到分选装置下方时,分选装置则根据上茧和下茧图像的位置信息将上茧和下茧分别从方格簇内取出进行分装,改装备结构简单,且分选过程自动化程度高,无需人工操作。
17.进一步的,所述方格簇包括网格板和底板,所述网格板和底板可拆卸连接。便于清洗,防止方格簇内部留下污渍,对后续的蚕茧造成污染,降低蚕茧品质。
18.进一步的,所述底板上开设有若干通孔,若干所述通孔分别设有可开闭的活动门。进行蚕茧分选时方便蚕茧离开方格簇。
19.进一步的,所述底板上还开设有若干与所述通孔一一对应的开关孔,所述活动门上固定连接有连接杆,所述连接杆末端安装有至少两个弹性件,所述弹性件间隔设置,所述弹性件顶端设有限位结构,所述限位结构顶端为斜面,底端为平面,所述活动门关闭的方法包括:
20.初始状态中,弹性件位于初始位置,此时,任意两个所述弹性件的限位结构顶端之间的距离小于所述开关孔的直径;关闭活动门,此时,所述弹性件向着所述开关孔移动,所述斜面与所述开关孔侧壁接触并使所述弹性件发生形变向内侧弯曲,当限位结构通过所述开关孔后,即所述平面离开所述开关孔,所述弹性件复原,此时所述平面下方为所述底板,所述底板与所述平面接触,阻止所述限位结构通过开关孔。
21.此结构使得活动门方便关闭,使得进行分选后的方格簇能够快速投入到后续分选操作中,且此结构方便活动门打开,只需将弹性件向中部压缩变向,然后推动弹性件离开开关孔即可,操作和装置结构简单,同时使得分选蚕茧的过程中不会对蚕茧造成伤害。
22.进一步的,所述分选装置包括若干伸缩装置,所述伸缩装置与所述开关孔一一对应,所述伸缩装置顶端固定连接有顶针和若干挡片,所述顶针位于若干所述挡片的中心,所述挡片与所述弹性件一一对应,任意两个所述挡片外侧之间的距离小于所述开关孔的直径,所述活动门关闭时,任意所述挡片下端均与对应的所述弹性件上的所述斜面相对。
23.分选装置为打开方格簇提供自动化机械装置,替代了人工分选,且效率更高,此装置通过挡片使弹性件向内侧发生形变,再通过顶针将其推出开关孔完成活动门打开操作,结构简单操作方便快捷。
24.进一步的,所述分选装置开启所述活动门的方法包括:
25.步骤一:基于所述智能分选模块和所述图像定位模块确定上茧图像或者下茧图像所对应的伸缩装置;使得分选装置能够分两次将上茧和下茧分别从方格簇上取下。
26.步骤二:伸长伸缩装置,此时,所述顶针插入若干所述弹性件之间,挡片逐渐与所述斜面接触;
27.步骤三:继续伸长伸缩装置,所述弹性件在所述挡片作用下向内侧发生形变,直至所述挡片与所述平面平行;
28.步骤四:继续伸长伸缩装置,所述顶针与所述连接杆接触并推动连接杆移动,直至所述限位结构脱离所述开关孔,此时所述活动门开启。整个开启过程只需伸长伸缩装置即可,操作简单。
29.进一步的,还包括位于所述第一图像采集装置和分选装置之间的翻转装置和第二图像采集装置,所述翻转装置用于将采集完所述第一图像后的所述方格簇翻转,所述第二图像采集装置采集翻转后的方格簇图像并得到第三图像,区分蚕茧是上茧或者下茧的具体方法为:
30.通过图像分割模块,将第三图像按照单个蚕茧进行分割,得到若干第四图像;
31.通过图像定位模块,将所述第四图像与翻转前的所述第二图像一一对应并得到第二位置信息;
32.通过智能分选模块,基于深度迁移网络将第四图像分为反面上茧图像和反面下茧图像,并结合上茧图像、反面上茧图像、下茧图像和反面下茧图像的第二位置信息将蚕茧进行分离;
33.分离原则为所述第二位置信息所记载的第二图像和第四图像分别为上茧图像和反面上茧图像时,则所述第二位置信息对应的蚕茧为上茧,其余均为下茧。
34.由于蚕茧为椭圆球型,图像采集模块智能采集蚕茧表面一半面积的图像,无法确定另一半蚕茧是属于上茧还是下茧,导致分选不准,翻转装置将方格簇翻转后从新采集蚕茧图像,结合之前采集的图像即可确定蚕茧的好坏,增加分选的准确性。
35.进一步的,所述翻转装置包括伸缩组件、安装于所述伸缩组件伸缩端的两个加长杆、与所述加长杆末端转动连接的夹持爪组件,所述夹持爪组件包括转动杆、两个与所述转动杆固定连接且方向相反的夹持爪,所述底板两端设有用于所述夹持爪抓取的固定杆,所述翻转装置翻转方格簇的方法包括:
36.翻转装置上夹持有过度底板,与夹持所述过度底板的夹持爪方向相反的夹持爪则处于张开状态;过度底板作为盖子将方格簇盖上,防止翻转时蚕茧掉出来。
37.当方格簇移动到翻转装置下方预设位置时,停止所述传送装置,伸长所述伸缩组件,直至所述过度底板与所述方格簇上端匹配,控制夹持爪夹持所述方格簇的底板;盖上过度底板并夹紧方格簇原底板,防止翻转时底板松动或者掉落,导致蚕茧掉出来。
38.收缩所述伸缩组件到预设位置,控制转动杆转动180度后,伸长所述伸缩组件,将所述方格簇放置到所述传送装置上,打开夹持所述过度底板的夹持爪,收缩所述伸缩组件
到初始位置,将所述方格簇的底板与方格簇分离;
39.开启所述传送装置,此时,原底板作为新的过度底板等待下一次翻转操作。过度底板与底板形状相同,使得底板能够轮流从当过度底板,避免单独制作过度底板,以及单独安装使用过度底板,节省成本和翻转时间。
40.本发明提供的一个或多个技术方案,至少具有如下技术效果或优点:
41.(1)本发明通过图像获取模块、图像预处理模块、图像分割模块、图像定位模块和智能分选模块,并结合机械装置完成蚕茧分选的自动化,代替人工操作,节省人力,且机械自动化分选准确性高,效率更高,增加了工厂的产能,提高工厂效益;
42.(2)将方格簇分为网格板和底板,不仅使方格簇内部清洗更方便,同时,网格板和底板分离,为后续的翻转操作提供方便;
43.(3)底板上设置活动门和开关孔,使用带斜面的弹性件作为开关结构,带挡片和顶针的分选装置作为开启装置,使得活动门能够根据上茧和下茧的图像分别打开,分别取出方格簇内的上茧和下茧,完成分选,结构简单,操作方便;
44.(4)翻转装置通过过度底板将方格簇盖上,防止蚕茧掉出,再通过夹持爪的翻转机构将方格簇进行翻转,对方格簇上经过反面的蚕茧进行二次图像获取,解决了图像采集模块无法完整获取蚕茧表面图像的问题。
附图说明
45.此处所说明的附图用来提供对本发明实施例的进一步理解,构成本发明的一部分,并不构成对本发明实施例的限定;
46.图1是本发明中系统模块示意图;
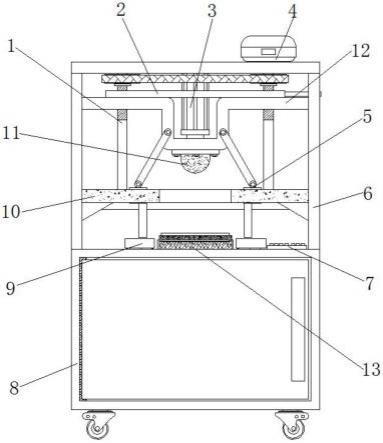
47.图2是本发明中选摘茧装备整体结构示意图;
48.图3是本发明中方格簇结构示意图;
49.图4是本发明中方格簇截面图;
50.图5是本发明中分选装置结构示意图;
51.图6是本发明中翻转装置结构示意图;
52.其中,1-传送装置,2-第一图像采集装置,3-方格簇,4-分选装置,5-网格板,6-底板,7-活动门,8-开关孔,9-连接杆,10-弹性件,11-限位结构,12-伸缩装置,13-顶针,14-挡片,15-翻转装置,16-第二图像采集装置,17-伸缩组件,18-加长杆,19-转动杆,20-夹持爪,21-固定杆,22-方格,23-上茧收集箱,24-下茧收集箱。
具体实施方式
53.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在相互不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
54.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述范围内的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
55.实施例一
56.本实施例提供了一种智能选摘茧系统,如图1所示,包括:
57.图像获取模块,获取蚕茧的第一图像;
58.图像预处理模块,对所述第一图像进行预处理,所述预处理包括图像增强和去噪;
59.图像分割模块,将第一图像按照单个蚕茧进行分割,得到若干第二图像;
60.图像定位模块,记录所述第二图像相对于第一图像的第一位置信息;
61.智能分选模块,基于深度迁移网络将第二图像分为上茧图像和下茧图像,并根据上茧图像和下茧图像的第一位置信息将蚕茧进行分离。
62.稳定一致的图像质量是保证选摘茧系统高效工作的重要基础,本实施例采用方格簇放置蚕茧,避免图像中间和周边区域存在程度不同的畸变的问题,采用线阵相机和光源确保光照变化均匀,机械结构上保证线性光源和相机视野对准,使得相机视野区域内各处光照亮度的均匀性和一致性;同时,设置合适的背景板,优选纯色背景,以降低环境因素对图像采集的干扰;图像分割模块利用方格簇的特点,沿着方格边缘进行分割,防止分选错误;图像定位模块利用机器视觉测量及定位算法,对蚕茧图像坐标系和世界坐标系进行转换,建立蚕茧图像位置和空间位置的对应关系,为智能分选模块提供精确的蚕茧位置坐标;智能分选模块基于深度迁移网络,在使用之前需要使用足够多的上茧图像和下茧图像的特征进行学习。
63.在更为优选的实施例中,如图3所示,获取第一图像之前,将所述蚕茧放入方格簇3内,所述第一图像为所述方格簇3的整体图像,所述第二图像为所述方格簇3上单个格子的图像。
64.方格簇3的大小根据实际情况确定,方格簇3上单个格子即方格22的数量根据方格簇3的大小确定,方格22的长大于蚕茧的长度,方格22的宽大于蚕茧的宽度且小于蚕茧的长度,防止蚕茧在方格22内发生侧向旋转。
65.实施例二
66.在实施例一的基础上,本实施例提供了一种智能选摘茧装备,如图2所示,包括传送装置1、第一图像采集装置2、方格簇3、分选装置4,所述传送装置1用于传输装有蚕茧的方格簇3,所述第一图像采集装置2和所述分选装置4均安装于所述传送装置1上方,所述第一图像采集装置2用于获取所述第一图像,所述分选装置4用于将所述方格簇3上的蚕茧按照上茧和下茧进行分装。
67.其中,传送装置1可以是皮带传送或者滑轨传送,传送平面优选使用两条皮带或者滑块托举方格簇3的两侧进行传送,方便分选装置4将蚕茧取出;第一图像采集装置2采用线阵相机,分选装置4可以设置一个或者两个,设置一个分选装置4时,则需要上茧收集箱23和下茧收集箱24在分选装置4循环下方移动,设置两个分选装置4时,则可以将上茧收集箱23和下茧收集箱24分别固定在两个分选装置4的下方。
68.在更为优选的实施例中,如图3和4所示,所述方格簇3包括网格板5和底板6,所述网格板5和底板6可拆卸连接。
69.其中,网格板5和底板6可以采用卡扣、挂钩、电磁铁吸附等可拆卸连接方式连接,为方便后续操作,优选电磁铁吸附的连接方式;底板6的边缘还可以设置为凸起状,将网格板5嵌入到其中进行固定,起到定位和限位的作用。
70.在更为优选的实施例中,如图3和4所示,所述底板6上开设有若干通孔,若干所述
通孔分别设有可开闭的活动门7。
71.其中,通孔的数量和方格22的数量相等且一一对应,活动门7的数量与通孔数量相等且一一对应,并且所有活动门7的开启方向相同,活动门7与底板6的连接方式采用合页或者转轴连接。
72.在更为优选的实施例中,如图3和4所示,所述底板6上还开设有若干与所述通孔一一对应的开关孔8,所述活动门7上固定连接有连接杆9,所述连接杆9末端安装有至少两个弹性件10,所述弹性件10间隔设置,所述弹性件10顶端设有限位结构11,所述限位结构11顶端为斜面,底端为平面,所述活动门7关闭的方法包括:
73.初始状态中,弹性件10位于初始位置,此时,任意两个所述弹性件10的限位结构11顶端之间的距离小于所述开关孔8的直径;关闭活动门7,此时,所述弹性件10向着所述开关孔8移动,所述斜面与所述开关孔8侧壁接触并使所述弹性件10发生形变向内侧弯曲,当限位结构11通过所述开关孔8后,即所述平面离开所述开关孔8,所述弹性件10复原,此时所述平面下方为所述底板6,所述底板6与所述平面接触,阻止所述限位结构11通过开关孔8。
74.其中,开关孔8的大小和形状可以是任意的,优选边长小于通孔宽度的正方形通孔,连接杆9一端焊接或者螺栓连接到活动门7下方,另一端延伸到开关孔8下方,弹性件10采用弹片,焊接或者螺栓连接到连接杆9上,弹性件10的数量根据开关孔8的形状确定,优选两个分别对应开关孔8的相对的两个侧壁,或者设置四个,分别对应开关孔8的四个侧壁;限位结构11优选截面为直角三角形的三棱柱结构,斜面朝上,其中一直角侧面焊接或者螺栓连接到弹性件10的外侧,另一个直角侧面朝向下方作为与底板6接触的平面。
75.在更为优选的实施例中,如图2-5所示,所述分选装置4包括若干伸缩装置12,所述伸缩装置12与所述开关孔8一一对应,所述伸缩装置12顶端固定连接有顶针13和若干挡片14,所述顶针13位于若干所述挡片14的中心,所述挡片14与所述弹性件10一一对应,任意两个所述挡片14外侧之间的距离小于所述开关孔8的直径,所述活动门7关闭时,任意所述挡片14下端均与对应的所述弹性件10上的所述斜面相对。
76.其中,伸缩装置12可以是液压伸缩柱或者电动伸缩柱,伸缩装置12的数量与开关孔8的数量相等,顶针13和挡片14可以焊接或者螺栓连接到伸缩装置12顶端,挡片14的数量与弹性件10的数量相等,挡片14的长度大于限位结构11的高度,在挡片14向下移动到与底板上表面共面或者越过底板上表面后,顶针13与连接杆9接触,且顶针13的长度大于挡片14的长度。
77.在更为优选的实施例中,所述分选装置4开启所述活动门7的方法包括:
78.步骤一:基于所述智能分选模块和所述图像定位模块确定上茧图像或者下茧图像所对应的伸缩装置12;
79.步骤二:伸长伸缩装置12,此时,所述顶针13插入若干所述弹性件10之间,挡片14逐渐与所述斜面接触;
80.步骤三:继续伸长伸缩装置12,所述弹性件10在所述挡片14作用下向内侧发生形变,直至所述挡片14与所述底板的上表面共面;
81.步骤四:继续伸长伸缩装置12,所述顶针13与所述连接杆9接触并推动连接杆9移动,直至所述限位结构11脱离所述开关孔8,此时所述活动门7开启。
82.活动门7开启后,伸缩装置12复位。
83.实施例三
84.在实施例二的基础上,如图2-3和图6所示,还包括位于所述第一图像采集装置2和分选装置4之间的翻转装置15和第二图像采集装置16,所述翻转装置15用于将采集完所述第一图像后的所述方格簇3翻转,所述第二图像采集装置16采集翻转后的方格簇3图像并得到第三图像,区分蚕茧是上茧或者下茧的具体方法为:
85.通过图像分割模块,将第三图像按照单个蚕茧进行分割,得到若干第四图像;
86.通过图像定位模块,将所述第四图像与翻转前的所述第二图像一一对应并得到第二位置信息;
87.通过智能分选模块,基于深度迁移网络将第四图像分为反面上茧图像和反面下茧图像,并结合上茧图像、反面上茧图像、下茧图像和反面下茧图像的第二位置信息将蚕茧进行分离;
88.分离原则为所述第二位置信息所记载的第二图像和第四图像分别为上茧图像和反面上茧图像时,则所述第二位置信息对应的蚕茧为上茧,其余均为下茧。
89.其中,第四图像与第二图像的位置信息存在翻转后的顺序错位,需要将第四图像按照翻转方向进行逆向排序后,将对应的第四图像与第二图像记录到同一个第二位置信息中,即一个第二位置信息中的第四图像与第二图像为同一个蚕茧的正反两面图像;下茧包括同一个第二位置信息所记载的第二图像和第四图像分别为上茧图像和反面下茧图像或者下茧图像和反面上茧图像或者下茧图像和反面下茧图像。
90.在更为优选的实施例中,如图2-3和图6所示,所述翻转装置15包括伸缩组件17、安装于所述伸缩组件17伸缩端的两个加长杆18、与所述加长杆18末端转动连接的夹持爪组件,所述夹持爪组件包括转动杆19、两个与所述转动杆19固定连接且方向相反的夹持爪20,所述底板6两端设有用于所述夹持爪20抓取的固定杆21,所述翻转装置15翻转方格簇3的方法包括:
91.翻转装置15上夹持有过度底板,与夹持所述过度底板的夹持爪20方向相反的夹持爪20则处于张开状态;
92.当方格簇3移动到翻转装置15下方预设位置时,停止所述传送装置1,伸长所述伸缩组件17,直至所述过度底板与所述方格簇3上端匹配,控制夹持爪20夹持所述方格簇3的底板6;
93.收缩所述伸缩组件17到预设位置,控制转动杆19转动180度后,伸长所述伸缩组件17,将所述方格簇3放置到所述传送装置1上,打开夹持所述过度底板的夹持爪20,收缩所述伸缩组件17到初始位置,将所述方格簇3的底板6与方格簇3分离;
94.开启所述传送装置1,此时,原底板6作为新的过度底板等待下一次翻转操作。
95.其中,伸缩组件17可以是液压伸缩柱或者电动伸缩柱,加长杆18的长度需要保证方格簇3完成翻转而不会被伸缩组件17阻挡,夹持爪组件与加长杆18末端的转动连接采用电机控制,转动原则为将两个夹持爪20的位置交换,夹持爪20可以采用电动或者液压的方式夹紧或者张开,两个夹持爪20之间的距离与两个固定杆21之间的距离相等;如图3所示,当开关孔8位于方格22短边一侧,且开关孔8和方格22关于方格22短边中线左右对称,则固定杆21的位置为方格簇3短边上的中点,使得方格簇翻转前后不会发生结构上的变化,同理,当开关孔8位于方格22长边一侧,且开关孔8和方格22关于方格22长边中线上下对称,则
固定杆21的位置为方格簇3长边上的中点,即方格簇3可以关于短边中线左右对称或者关于长边中线上下对称。
96.尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
97.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。