1.本发明属于翼伞系统航迹跟踪控制技术领域,具体涉及基于线性自抗扰控制与预测控制切换的翼伞系统航迹跟踪控制方法。
背景技术:
2.翼伞系统作为一种特殊的柔翼飞行器,采用柔性冲压式翼伞提供升力,具有良好的滑翔性与可控性,在军事和航空航天领域的精确空投上得到了广泛的应用。翼伞系统是一个非常复杂的、强耦合性、大时滞的强非线性系统,因此,在自主精确归航的过程中对其进行轨迹跟踪控制是非常必要的。翼伞系统是一种欠驱动、无动力的系统,只能通过下拉翼伞襟翼后缘两侧的下拉绳改变翼伞伞衣的气动力和气动力矩对翼伞系统进行控制,从而实现翼伞在空中的机动飞行和雀降着陆。
3.目前,在翼伞系统轨迹跟踪控制的研究中主要有:用于翼伞系统航迹跟踪的传统pd控制器和增益调节型模糊控制器,通过简化翼伞系统为线性模型的预测控制器,以及针对风干扰设计的自抗扰控制器等。
4.在上述控制方法中,大多采用单一的控制方法对翼伞系统归航轨迹进行跟踪控制。然而翼伞系统是一种高空投放、无动力、非线性系统,其飞行速度慢,在归航过程中极易受到外界风场干扰,而且采用操纵绳控制翼伞系统,其操纵响应存在较大的滞后现象。
5.因此,单一的控制方法往往难以同时有效解决翼伞系统轨迹跟踪控制过程中的大时滞、易受风场干扰等难题。
技术实现要素:
6.本发明所要解决的技术问题是针对上述现有技术的不足,提供基于线性自抗扰控制与预测控制切换的翼伞系统航迹跟踪控制方法,对翼伞系统滑翔段和能量控制段进行轨迹跟踪控制,同时发挥线性自抗扰控制良好抗干扰能力和预测控制克服时滞性等优势,以达到更优的控制效果,具有更好的控制精度、更强的抗干扰能力以及良好的动态性能,解决翼伞系统轨迹跟踪控制中强非线性、强耦合性、大时滞性等问题。
7.为实现上述技术目的,本发明采取的技术方案为:
8.基于线性自抗扰控制与预测控制切换的翼伞系统航迹跟踪控制方法,包括:
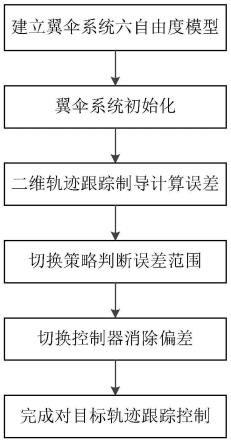
9.步骤1,对翼伞系统进行受力分析,根据牛顿-欧拉方程建立翼伞系统平动和转动六自由度模型作为航迹跟踪控制基础;
10.步骤2,基于制导路径跟踪原理,采用二维轨迹跟踪制导策略设计翼伞系统的制导器,计算实际轨迹和目标轨迹之间的前向误差和横向误差,通过追踪目标轨迹运动的航向角即可消除误差;
11.步骤3,在二维轨迹跟踪制导策略的基础上,通过构造系统的线性扩张状态观测器leso及pd控制器设计线性自抗扰控制器ladrc;
12.步骤4,在二维轨迹跟踪制导策略的基础上,通过构造系统的状态空间模型设计预测控制器mpc;
13.步骤5,根据航向角偏差设置切换条件,当航向角偏差不满足条件时,控制器接收指令采用线性自抗扰控制器控制,当航向角偏差满足条件时,控制器切换到预测控制器控制,实现翼伞系统的切换控制。
14.为优化上述技术方案,采取的具体措施还包括:
15.上述的步骤1具体为:
16.设翼伞系统在惯性坐标系下的位置矢量为pi=[x
i y
i zi]
t
,翼伞系统在物伞体坐标系下的速度矢量为vb=[u
b v
b wb]
t
,翼伞系统在惯性坐标系下的姿态角矢量为ai=[φ θ ψ]
t
,翼伞系统在物伞体坐标系下的姿态角速度矢量为wb=[p q r]
t
;
[0017]
根据牛顿-欧拉方程可得翼伞系统平动和转动六自由度模型:
[0018]
(1)平动三自由度方程:
[0019][0020][0021]
(2)转动三自由度方程:
[0022][0023][0024]
式中,m为翼伞系统总质量,r
ib
为物伞体坐标系b到大地坐标系i的转换矩阵,fg为翼伞系统在物伞体坐标系下的重力,fa为翼伞系统在物伞体坐标系下的气动力,fs为载荷在物伞体坐标系下的有效阻力,f
aw
为翼伞系统附加质量在物伞体坐标系下产生的附加动力,为角速度产生的反对称矩阵,ma为翼伞系统在物伞体坐标系下的气动力矩,m
am
为翼伞系统附加质量在物伞体坐标系下产生的附加气动力矩,j为翼伞系统的转动惯量。
[0025]
上述的步骤2具体为:
[0026]
定义点p为翼伞系统实际归航轨迹上的一点,分别用p=[x y]
t
和表示点p的惯性位置和速度矢量,用表示点p的速度大小,用表示点p运动的方向角;
[0027]
定义点p
p
为翼伞系统目标归航轨迹上的一点,分别用和表示点p
p
的惯性位置和速
度矢量,用表示点p
p
运动的方向角;
[0028]
其中,点p
p
的位置随尺度变量的变化而变化;
[0029]
建立以目标轨迹运动方向为x轴的目标轨迹坐标系,惯性坐标系到目标轨迹坐标系的转换矩阵为:
[0030][0031]
则点p与点p
p
之间的误差量为:
[0032][0033]
式中,s表示前向误差,e表示横向误差。
[0034]
对于翼伞系统而言,在轨迹跟踪过程中,前向误差由目标轨迹点p
p
对u
p
和的刷新而消除,因此只需要设置控制器控制翼伞系统的航向角χd跟踪目标轨迹运动的航向角χ
p
即可。
[0035]
上述的步骤3具体为:
[0036]
翼伞系统当前的航向角为:根据翼伞系统动力学模型,翼伞系统航向角的二阶形式表示为:
[0037][0038]
式中,f为翼伞系统的总扰动,u(t)为翼伞系统控制量,b为控制器增益;
[0039]
假设f可微,将其扩展为一个新的状态变量,重构leso方程可得:
[0040][0041]
式中,为leso的状态变量,β1,β2,β3为观测器增益;
[0042]
对leso方程进行拉氏变换并配置特征方程极点到s平面左半实轴-ωo处从而确定观测器增益为:β1=3ωo,
[0043]
在leso估计出扰动并补偿后,控制器本质上是一个pd控制器,令:
[0044][0045]
[0046][0047]
式中,χ
p
为目标轨迹的方向角,ψe为航向偏差,u0为虚拟控制量,β
01
,β
02
为控制器增益。根据上式计算控制器χ
p
→
u0传递函数为:
[0048][0049]
则特征方程为:c(s)=s2 β
02
s β
01
将pd控制器的两个极点配置到s平面左半轴-ωc处,得:c(s)=(s ωc)2[0050]
从而确定pd控制器增益为:β
02
=2ωc。
[0051]
由此可得线性自抗扰控制器的控制律为:
[0052][0053]
上述的步骤4具体为:
[0054]
首先,给出以翼伞系统的航向角ψ为输出,单侧下拉制动δa为输入的状态空间模型:x
k 1
=axk buk,yk=cxk;
[0055]
假设预测区间为h
p
,目标轨迹的方向角为wk,则估计误差为为了计算给定时刻的控制输入,引入代价函数为:
[0056][0057]
式中,为系统期望值,为系统预测输出,q和r为系统权重系数矩阵,u为系统输入控制序列,由系统状态方程得:
[0058][0059][0060][0061]
j=(w-k
ca
x
k-k
cab
u)
tq·
(w-k
ca
x
k-k
cab
u) u
t
ru
[0062]
通过最小化代价函数,解出控制量u的表达式为:
[0063][0064]
上式表示预测控制在整个控制范围内的最佳控制量输入,但是在k时刻只需要取第一个控制量uk。
[0065]
上述的步骤5中航向角偏差切换条件设置为ψe≤π/20,在翼伞系统投放后,满足ψe≤π/20时,控制器接收指令采用线性自抗扰控制器控制,当ψe≤π/20时,切换到预测控制器控制。
[0066]
本发明具有以下有益效果:
[0067]
针对翼伞系统易受外界风场干扰且翼伞系统气动力不精确等问题,本发明采用线性自抗扰控制和预测控制相互切换的控制策略,结合线性自抗扰控制抗扰动能力强、响应速度快和预测控制能有效克服系统时滞性、跟踪精度高的优点,并采用二维制导轨迹跟踪策略设计制导律,对翼伞系统的归航轨迹进行跟踪控制,不仅提高了翼伞系统跟踪精度,使得翼伞系统在轨迹跟踪的过程中具有良好的动态性和抗干扰能力,而且减小了控制量的输入,避免系统频繁拉动操纵绳造成的不稳定。
附图说明
[0068]
图1为本发明公开的翼伞系统切换控制方法的原理流程图;
[0069]
图2为本发明具体实施例基于制导的二维航迹跟踪策略图;
[0070]
图3为本发明具体实施例切换策略控制过程图;
[0071]
图4为本发明具体实施例目标归航轨迹;
[0072]
图5为航向角跟踪曲线对比效果图;
[0073]
图6为水平轨迹跟踪曲线对比效果图;
[0074]
图7为控制量变化对比效果图;
[0075]
图8为切换控制下三维跟踪曲线示意图。
具体实施方式
[0076]
以下结合附图对本发明的实施例作进一步详细描述。
[0077]
结合图1,本发明基于线性自抗扰控制与预测控制切换的翼伞系统航迹跟踪控制方法,包括:
[0078]
步骤1,对翼伞系统进行受力分析,根据牛顿-欧拉方程建立翼伞系统平动和转动六自由度模型作为航迹跟踪控制基础;
[0079]
本发明忽略伞体和载荷之间的相对运动,将翼伞系统看作一个整体,建立翼伞系统6自由度非线性动力学模型。
[0080]
设翼伞系统在惯性坐标系下的位置矢量为pi=[x
i y
i zi]
t
,翼伞系统在物伞体坐标系下的速度矢量为vb=[u
b v
b wb]
t
,翼伞系统在惯性坐标系下的姿态角矢量为ai=[φ θ ψ]
t
,翼伞系统在物伞体坐标系下的姿态角速度矢量为wb=[p q r]
t
。
[0081]
根据牛顿-欧拉方程可得翼伞系统六自由度方程:
[0082][0083]
式中,m为翼伞系统总质量,r
ib
为物伞体坐标系b到大地坐标系i的转换矩阵,fg为翼伞系统在物伞体坐标系下的重力,fa为翼伞系统在物伞体坐标系下的气动力,fs为载荷在物伞体坐标系下的有效阻力,f
aw
为翼伞系统附加质量在物伞体坐标系下产生的附加动力,为角速度产生的反对称矩阵。ma为翼伞系统在物伞体坐标系下的气动力矩,m
am
为翼伞系统附加质量在物伞体坐标系下产生的附加气动力矩,j为翼伞系统的转动惯量。
[0084]
步骤2,结合图2,基于制导路径跟踪原理,采用二维轨迹跟踪制导策略设计翼伞系统的制导器,计算实际轨迹和目标轨迹之间的前向误差和横向误差,通过追踪目标轨迹运动的航向角即可消除误差;
[0085]
一般情况下,翼伞系统在滑翔段和能量控制段的下降速度是不变的,通过控制电机对翼伞系统襟翼后缘操纵绳实施单侧下拉的方式对水平轨迹误差进行修正。本发明采用二维轨迹跟踪制导策略来设计翼伞系统的制导律。
[0086]
定义点p为翼伞系统实际归航轨迹上的一点,分别用p=[x y]
t
和表示点p的惯性位置和速度矢量,用表示点p的速度大小,用表示点p运动的方向角。
[0087]
定义点p
p
为翼伞系统目标归航轨迹上的一点,分别用和表示点p
p
的惯性位置和速度矢量,用表示点p
p
运动的方向角。其中,点p
p
的位置随尺度变量的变化而变化。
[0088]
建立以目标轨迹运动方向为x轴的目标轨迹坐标系,惯性坐标系到目标轨迹坐标系的转换矩阵为:
[0089][0090]
则点p与点p
p
之间的误差量为:
[0091][0092]
式中,s表示前向误差,e表示横向误差。对于翼伞系统而言,在轨迹跟踪过程中,前向误差由目标轨迹点p
p
对u
p
和的刷新而消除,因此只需要设置控制器控制翼伞系统的航向角χd跟踪目标轨迹运动的方向角χ
p
即可。
[0093]
步骤3,在二维轨迹跟踪制导策略的基础上,通过构造系统的线性扩张状态观测器
leso及pd控制器设计线性自抗扰控制器ladrc;
[0094]
首先设计线性自抗扰控制器,由制导策略可知,通过控制翼伞系统的航向角χd即可消除翼伞系统当前位置和目标位置之间的横向误差,翼伞系统当前的航向角为:
[0095][0096]
根据翼伞系统动力学模型,翼伞系统航向角的二阶形式可表示为:
[0097][0098]
式中,f为翼伞系统的总扰动,u(t)为翼伞系统控制量,b为控制器增益。假设f可微,将其扩展为一个新的状态变量,可得:
[0099][0100]
式中,χ1=y,χ3=f。
[0101]
由luenberger提出的状态观测器理论,解决了在确定性条件下受控系统的状态重构问题,leso方程如下:
[0102][0103]
式中,为leso的状态变量,β1,β2,β3为观测器增益。
[0104]
对leso方程进行拉氏变换可得:
[0105][0106]
对应的特征方程为:
[0107]
l
*
(s)=s3 β1s2 β2s β3[0108]
将观测器的3个极点统一配置到s平面左半实轴-ωo处,得:
[0109]
l
*
(s)=(s ωo)3[0110]
从而可以确定观测器增益为:
[0111]
β1=3ωo,
[0112]
在leso估计出扰动并补偿后,控制器本质上是一个pd控制器。令:
[0113][0114]
即,
[0115][0116][0117]
式中,χ
p
为目标轨迹的方向角,ψe为跟踪误差,u0为虚拟控制量,β
01
,β
02
为控制器增益。根据上式计算控制器χ
p
→
u0传递函数为;
[0118][0119]
则特征方程为:
[0120]
c(s)=s2 β
02
s β
01
[0121]
将控制器的两个极点配置到s平面左半轴-ωc处,得:
[0122]
c(s)=(s ωc)2[0123]
从而可以确定控制器增益为:
[0124]
β
02
=2ωc[0125]
由此可得线性自抗扰控制器的控制律为:
[0126][0127]
步骤4,在二维轨迹跟踪制导策略的基础上,通过构造系统的状态空间模型设计预测控制器mpc;
[0128]
其次设计预测控制器,首先给出以翼伞系统的航向角ψ为输出,单侧下拉制动δa为输入的状态空间模型:
[0129]
x
k 1
=axk buk,yk=cxk[0130]
式中,a、b和c为系统矩阵,xk为状态向量,uk为控制输入,yk为k时刻的输出。
[0131]
假设预测区间为h
p
,目标轨迹的方向角为wk,则估计误差为为了计算给定时刻的控制输入,引入代价函数为:
[0132][0133]
式中,为系统期望值,为系统预测输出,q和r为系统权重系数矩阵,u为系统输入控制序列,由系统状态方程可得:
[0134]
[0135][0136][0137]
j=(w-k
ca
x
k-k
cab
u)
tq·
(w-k
ca
x
k-k
cab
u) u
t
ru
[0138]
通过最小化代价函数,解出控制量u的表达式为:
[0139][0140]
上式表示预测控制在整个控制范围内的最佳控制量输入,但是在k时刻只需要取第一个控制量uk。
[0141]
步骤6,结合图3,设置航向角偏差切换条件,当航向角偏差不满足条件时,控制器接收指令采用线性自抗扰控制器控制,在控制跟踪一段时间后,当航向角偏差满足条件时,控制器切换到预测控制器控制,由此实现翼伞系统的切换控制。
[0142]
由制导策略可知,在翼伞系统投放后,通过控制翼伞系统的航向角消除飞行轨迹与目标轨迹之间的横向误差。当航向偏差ψe大于给定值ψe≤π/20时,控制器接收指令采用线性自抗扰控制。在控制跟踪一段时间后,当航向偏差ψe小于或给定值ψe≤π/20时,控制器切换到预测控制,继续精确追踪目标轨迹。
[0143]
实施例1
[0144]
翼伞系统的几何特性参数、质量特性参数主要包括:翼展b=13.98m,弦长c=5.59m,伞衣有效面积s
p
=62.5m2,安装角伞绳长度l=7.45m,载荷体有效面积ss=1.9m2,系统总质量m=620kg。
[0145]
如图4所示,设置翼伞系统目标归航轨迹的初始位置为x0=1000m,y0=500m,z0=2000m,初始运动的航向角为χ
p
=π/3,终止位置为x1=0m,y1=0m,z1=0m。
[0146]
设置翼伞系统投放的初始位置为x=950m,y=600m,z=2000m,初始航向角为χd=π/2。在翼伞系统进行轨迹跟踪的过程中加入风扰:0s~354s,施加风速8m/s、风向180的定常风;200s~300s,施加幅值为5m/s、风向270
°
的突风:
[0147]
设置线性自抗扰控制器的参数为:ω0=20,ωc=10,b0=5;
[0148]
设置预测控制器的参数为:采样时间ts=0.1s,预测步长h
p
=30。
[0149]
图5~图6分别展示了预测控制与切换控制对目标方向角和目标轨迹的跟踪效果。
[0150]
在预测控制下,翼伞系统跟踪目标航向角的动态响应时间为4s左右,最终着陆误差为23m。
[0151]
在切换控制下,翼伞系统跟踪目标方向角的动态响应时间为2s左右,最终着陆误差为9m。
[0152]
同时,图6展示了切换控制在过渡阶段以及突风干扰的情况下相比于预测控制具有更小的稳态误差。
[0153]
图7展示了由切换控制器控制的翼伞系统在风干扰条件下三维轨迹跟踪的归航情况。
[0154]
图8展示了控制量变化情况,相较于预测控制,切换控制的控制量变化更平稳,避免了驱动电机频繁拉动操纵绳。
[0155]
由仿真曲线可见,相比于单一预测控制,本发明切换控制方法具有更好的控制精度、更强的抗干扰能力以及良好的动态性能。
[0156]
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。