1.本实用新型属于管道巡检技术领域,具体涉及一种用于油气巡检无人机的飞行控制系统。
背景技术:
2.目前,管道巡检多数地方还是以人工为主,但人工效率较低,成本高。为此,无人机巡检技术逐渐体现出了它自身的优势,有成为未来油气管道巡检主流方式的趋势。根据作业频率和作业内容的不同,无人机巡检管道主要分为常规巡检和特殊巡检两种。其中,常规巡检主要包括管道周边环境的监测和管道线路巡检,特殊巡检则为应急监测。因此对飞行控制器的要求有了更高的需求。
3.常规市场上的飞控无法直接满足现有的油气巡检所需。往往多数只是改装、叠加的方式,来满足一时的所需,质量和可靠性上并没有保障。特殊巡检作业更是问题频出,存在很大的安全隐患。
技术实现要素:
4.本实用新型的目的在于提供一种用于油气巡检无人机的飞行控制系统,克服现有技术中存在的上述技术问题。
5.为此,本实用新型提供的技术方案如下:
6.一种用于油气巡检无人机的飞行控制系统,包括飞行控制器和上位机,所述飞行控制器和上位机通讯连接,所述上位机用于对飞行控制器的控制及监控;
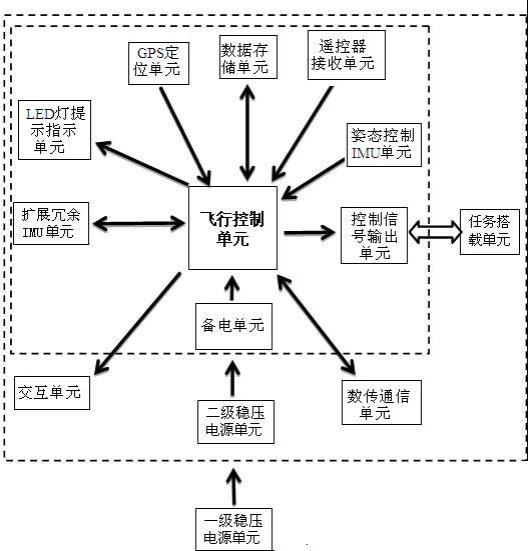
7.所述飞行控制器包括电源模块、飞行控制单元、以及与飞行控制单元电信号连接的数据存储单元、数传通信单元、姿态控制imu单元、gps定位单元、任务搭载单元、控制信号输出单元和交互单元,所述飞行控制单元用于无人机姿态控制及任务执行控制,所述电源模块用于给各单元提供所需电压;
8.所述数据存储单元用于存储飞行日志、存储航线及油气巡检数据的采集存储;所述数传通信单元用于上位机对飞行控制器的控制及监控;所述姿态控制imu单元用于飞行控制器的姿态检测;所述gps定位单元用于飞行控制器的空中坐标定位及采集的数据添加位置坐标;所述任务搭载单元用于外设的控制和数据采集;所述控制信号输出单元用于电平的转换;所述交互单元用于上位机与飞行控制器的飞行控制和仿真。
9.所述电源模块包括一级稳压电源单元、二级稳压电源单元和备电单元,所述一级稳压电源单元用于将高压锂电池的电压转化为一次低压电源,所述二级稳压电源单元用于将一次低压电源降压为二次电压,作为飞行控制器的主电源,所述备电单元用于在主电源缺失情况下,为飞行控制器提供备用电。
10.还包括遥控器,所述飞行控制器还包括遥控器接收单元,所述遥控器接收单元用于特殊作业或高精度作业时接收遥控器的信号。
11.所述飞行控制器还包括扩展冗余imu单元和led灯提示指示单元,所述扩展冗余
imu单元用于降低飞行控制器的干扰,所述led灯提示指示单元用于实时显示飞行控制器内各单元的状态。
12.所述一级稳压电源单元还包含电源监测模块,用于监测油气巡检无人机搭载的锂电池电源的监测。
13.所述姿态控制imu单元包括气压计、差分气压计、磁力计、陀螺仪。
14.所述任务搭载单元包括搭载的激光测距仪、红外拍摄相机、高清相机、激光测甲烷仪。
15.本实用新型的有益效果是:
16.本实用新型提供的这种用于油气巡检无人机的飞行控制系统,采用地面站(上位机)加飞行控制的模式,满足远距离,大规模、高效率的油气管道巡检。地面站用于实时远距离监控飞行控制器的状态,用于飞行控制器的状态调整和回传数据的评估,保证无人机外出作业的安全可控性。
17.本实用新型的飞行控制器在满足无人机基本正常飞行所需的同时,可以通过遥控器接收单元用于特殊作业或高精度作业,可以对油气管道进行针对性的巡检任务,提高了油气管道的安全管控水平,巡检机动、灵活性好,提高了管道巡护的应变能力。
18.下面将结合附图做进一步详细说明。
附图说明
19.图1是本实用新型的原理框图;
20.图2是信号转换示意图。
具体实施方式
21.以下由特定的具体实施例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭示的内容轻易地了解本实用新型的其他优点及功效。
22.现参考附图介绍本实用新型的示例性实施方式,然而,本实用新型可以用许多不同的形式来实施,并且不局限于此处描述的实施例,提供这些实施例是为了详尽地且完全地公开本实用新型,并且向所属技术领域的技术人员充分传达本实用新型的范围。对于表示在附图中的示例性实施方式中的术语并不是对本实用新型的限定。在附图中,相同的单元/元件使用相同的附图标记。
23.除非另有说明,此处使用的术语(包括科技术语)对所属技术领域的技术人员具有通常的理解含义。另外,可以理解的是,以通常使用的词典限定的术语,应当被理解为与其相关领域的语境具有一致的含义,而不应该被理解为理想化的或过于正式的意义。
24.实施例1:
25.本实施例提供了一种用于油气巡检无人机的飞行控制系统,包括飞行控制器和上位机,所述飞行控制器和上位机通讯连接,所述上位机用于对飞行控制器的控制及监控;
26.所述飞行控制器包括电源模块、飞行控制单元、以及与飞行控制单元电信号连接的数据存储单元、数传通信单元、姿态控制imu单元、gps定位单元、任务搭载单元、控制信号输出单元和交互单元,所述飞行控制单元用于无人机姿态控制及任务执行控制,所述电源模块用于给各单元提供所需电压;
27.所述数据存储单元用于存储飞行日志、存储航线及油气巡检数据的采集存储;所述数传通信单元用于上位机对飞行控制器的控制及监控;所述姿态控制imu单元用于飞行控制器的姿态检测;所述gps定位单元用于飞行控制器的空中坐标定位及采集的数据添加位置坐标;所述任务搭载单元用于外设的控制和数据采集;所述控制信号输出单元用于电平的转换;所述交互单元用于上位机与飞行控制器的飞行控制和仿真。
28.本实用新型是用于满足在油气巡检作业中的大多数需求,其中,飞行控制单元为飞行控制器的控制中心,用于无人机姿态控制及任务执行等逻辑控制。
29.本实用新型提供的这种用于油气巡检无人机的飞行控制系统,采用地面站(上位机)加飞行控制的模式,满足远距离,大规模、高效率的油气管道巡检。地面站用于实时远距离监控飞行控制器的状态,用于飞行控制器的状态调整和回传数据的评估,保证无人机外出作业的安全可控性。
30.实施例2:
31.在实施例1的基础上,本实施例提供了一种用于油气巡检无人机的飞行控制系统,所述电源模块包括一级稳压电源单元、二级稳压电源单元和备电单元,所述一级稳压电源单元用于将高压锂电池的电压转化为一次低压电源,所述二级稳压电源单元用于将一次低压电源降压为二次电压,作为飞行控制器的主电源,所述备电单元用于在主电源缺失情况下,为飞行控制器提供备用电。
32.如图1所示,一级稳压电源单元为油气巡检无人机搭载的锂电池经一次dc/dc稳压后输送给飞行控制器提供5v的电源,主要用于二级稳压电源单元、数传通信单元、任务搭载单元、控制信号输出单元的供电。
33.二级稳压电源单元为飞行控制器的核心供电电源,为一级稳压电源单元的5v电源通过ldo稳压至3.3v电源输出,为飞行控制器中的器件提供3.3v电源。
34.备电单元与飞行控制器的3.3v电源连接,采用超级电容电池,以充电电路实现自动充电设计,保证备电的可靠性、不必频繁开换电池。备电单元为满足飞行的基本数据在突发情况下,也能保证故障历史数据的记录,便于追溯问题。备电单元也保证了飞行控制器在极限状态下,核心部分不受外界的电源波动干扰,利用提高飞行控制器的稳定性。
35.实施例3:
36.在实施例1的基础上,本实施例提供了一种用于油气巡检无人机的飞行控制系统,还包括遥控器,所述飞行控制器还包括遥控器接收单元,所述遥控器接收单元用于特殊作业或高精度作业时接收遥控器的信号。
37.遥控器接收单元为飞机在近距离,特殊区域的高精度作业所需,通过与遥控器的配合,可实现遥控器的手动精准控制。
38.实施例4:
39.在实施例1的基础上,本实施例提供了一种用于油气巡检无人机的飞行控制系统,所述飞行控制器还包括扩展冗余imu单元和led灯提示指示单元,所述扩展冗余imu单元用于降低飞行控制器的干扰,所述led灯提示指示单元用于实时显示飞行控制器内各单元的状态。
40.扩展冗余imu单元用于针对特殊巡检任务所预留的imu扩展端口,一般按任务所需搭载特殊imu。扩展冗余imu单元为一个独立的扩展单元,可针对干扰等特殊环境,添加指定
的imu器件,其预留的端口spi、i2c、rs232、rs485等扩展接口也可添加其他指定的设备。
41.实施例5:
42.在实施例2的基础上,本实施例提供了一种用于油气巡检无人机的飞行控制系统,所述一级稳压电源单元还包含电源监测模块,用于监测油气巡检无人机搭载的锂电池电源的监测。
43.通过rs485通信交互给飞行控制单元,便于飞行控制器综合判断飞行的情况。
44.实施例6:
45.本实施例提供了一种用于油气巡检无人机的飞行控制系统,包括飞行控制器和上位机,所述飞行控制器和上位机通讯连接。
46.如图1所示,飞行控制器包括飞行控制单元、数据存储单元、一级稳压电源单元、二级稳压电源单元、数传通信单元、姿态控制imu单元、扩展冗余imu单元、gps定位单元、任务搭载单元、备电单元、led灯提示指示单元、遥控器接收单元、控制信号输出单元、交互单元。
47.在本实施例中,飞行控制单元为微处理器mcu(型号为stm32f765vit6),为飞行控制器的控制中心。分别与数据存储单元以4位总线的方式通信连接。与遥控器接收单元以单线sbus通信的方式通信连接。与gps单元以2线制串口的方式通信连接。与led灯提示指示单元以rs-485的方式通信连接。与数传通信单元以rs-232的方式通信连接。与飞交互单元与usb的方式通信连接。与姿态控制imu单元、扩展冗余imu单元则根据需求以i2c或spi的方式进行数据通信连接,得到的所有imu数据会在行控制单元进行融合运算,来监控、调整无人机的飞行姿态。与控制信号输出单元以pwm波的方式单向输出,在控制信号输出单元实现3.3v的pwm波转换成5v的pwm波输出去控制任务搭载单元。
48.数据存储单元为emmc芯片(型号为emmc04g-m627-a01)用于记录飞行控制器的飞行日志以及任务飞行航线的存储,也可用于油气巡检数据的采集存储。
49.一级稳压电源单元为油气巡检无人机搭载的锂电池经一次dc/dc稳压后输送给飞行控制器提供5v的电源,主要用于二级稳压电源单元、数传通信单元、任务搭载单元、控制信号输出单元的供电。其次此一级稳压电源单元还包含电源监测模块,用于监测油气巡检无人机搭载的锂电池电源的监测。通过rs485通信交互给飞行控制单元,便于飞行控制器综合判断飞行的情况。
50.二级稳压电源单元为飞行控制器的核心供电电源,为一级稳压电源单元的5v电源通过ldo稳压至3.3v电源输出,为飞行控制器中的器件提供3.3v电源。
51.数传通信单元采用一级稳压电源单元提供dc5v的电源,核心采用p900模块进行远距离通信,直接融合进飞行控制器,不用在外挂成品模块。更好的防水,防外界干扰。将必要的imu信息、gps定位单元、一级稳压电源单元的电源监测模块的信息远距离传回地面的地面站端,实现远距离的可实时观察性、可控性,使得在远距离管道巡检的安全具有保证。
52.姿态控制imu单元包括气压计、差分气压计、磁力计、陀螺仪。用以保证无人机在飞行过程中的姿态校准。
53.扩展冗余imu单元为独立的扩展单元,可针对干扰等特殊环境,添加指定的imu器件,其预留的端口spi、i2c、rs232、rs485等扩展接口也可添加其他指定的设备。
54.任务搭载单元包括搭载的激光测距仪、红外拍摄相机、高清相机、激光测甲烷仪。任务搭载单元独立运作,飞行控制器只提供动作必要的动作信号。
55.备电单元与飞行控制器的3.3v电源连接,采用超级电容电池,以充电电路实现自动充电设计,保证备电的可靠性、不必频繁开换电池。备电单元为满足飞行的基本数据在突发情况下,也能保证故障历史数据的记录,便于追溯问题。备电单元也保证了飞行控制器在极限状态下,核心部分不受外界的电源波动干扰,利用提高飞行控制器的稳定性。
56.led灯提示指示单元采用rs485的通信方式,通过驱动器驱动扩展至8位,分别控制8个led灯,通过组合定义灯语,用于作业人员的快速调参指示。
57.控制信号输出单元为飞行控制单元对外发送pwm信号时,进行信号电平的转换和隔离外部的干扰。提高飞行控制单元输出控制的信号质量,满足电子调速器、任务搭载单元外设的控制信号需求电平。如图2所示。
58.交互单元以usb的通信方式,直接与飞行控制单元通信。可直接调试、更改飞行控制器对应无人机的机型参数,上传下载存储单元的飞行日志、任务航线、采集到的任务数据。
59.以上例举仅仅是对本实用新型的举例说明,并不构成对本实用新型的保护范围的限制,凡是与本实用新型相同或相似的设计均属于本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。