1.本发明涉及水蒸气压缩的技术领域,具体涉及一种水蒸气螺杆压缩机与膨胀机的转子型线。
背景技术:
2.螺杆产品中,转子型线是产品性能的决定因素,已经历了三代的发展。第一代转子型线是对称圆弧型线,这种型线具有易于设计、生产加工简单和测量方便的特点,初期的螺杆产品广泛使用该型线。第二代转子型线是不对称型线,在型线的曲线组成中加入了点、直线和摆线。不对称型线相较对称圆弧型线而言,显著减小了泄露三角形的面积,仅为后者的十分之一左右,使螺杆产品的性能得到了明显提升。第三代转子型线是由各个螺杆产品的主要生产厂商,根据各自产品的特点发展的型线。但其主要的特点是,型线的组成曲线中不再有点和直线,而是全部由圆弧、椭圆和抛物线等二次曲线组成。其代表有ghh型线、日立型线和srm-d型线等。
3.但是,螺杆产品自问世以来主要应用于制冷和空气压缩领域,使用的工质以制冷剂和空气为主。以上所述的第三代型线也是针对这些应用场景设计。
4.水蒸气压缩和膨胀是近十年以来螺杆产品的新兴应用领域。水蒸气工质也与传统的制冷剂和空气工质,在物性参数上有明显不同。而目前大多水蒸气螺杆产品只是将传统螺杆产品的结构稍作修改,直接投入使用,没有针对水蒸气压缩膨胀这种新的应用场景,因此有必要设计一种全新的高效型线。
技术实现要素:
5.本发明的目的在于克服上述背景技术的不足,提供一种水蒸气螺杆压缩机与膨胀机的转子型线,该转子型线适用于水蒸气工质的高效型线,改变水蒸气螺杆产品使用传统螺杆产品型线的状况,提高水蒸气螺杆产品的性能。
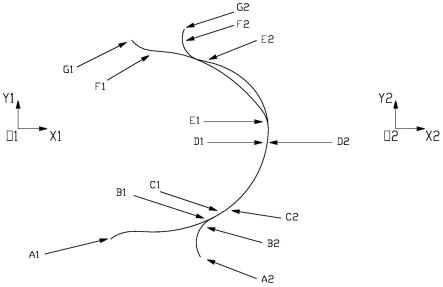
6.为实现上述目的,本发明所设计的一种水蒸气螺杆压缩机与膨胀机的转子型线,包括一对相互啮合的阳转子型线和阴转子型线,阳转子型线和阴转子型线均采用包络线与圆弧构成的双边不对称结构;
7.所述阳转子型线由第一阳转子包络线a1b1、第二阳转子包络线b1c1、第一阳转子圆弧c1d1、第二阳转子圆弧d1e1、第三阳转子包络线e1f1和第三阳转子圆弧f1g1共六段二次曲线依次连接组成;
8.所述阴转子型线由第一阴转子圆弧a2b2、第二阴转子圆弧b2c2、第三阴转子圆弧c2d2、阴转子包络线d2e2、第四阴转子圆弧e2f2和第五阴转子圆弧f2g2共六段二次曲线依次连接组成。
9.进一步地,以o1为阳转子的中心,以o2为阴转子的中心建立坐标系,o1o2的距离为阳转子与阴转子的中心距a,阳转子、阴转子的齿数分别为z1、z2,阳转子、阴转子的齿高分别为rc1、rc2;阳转子的节圆半径r1w=a*z1/(z1 z2),阴转子的节圆半径r2w=a*z2/(z1
z2)。
10.进一步地,所述第一阳转子包络线a1b1与第二阳转子包络线b1c1相切于b1点;所述第二阳转子包络线b1c1与第一阳转子圆弧c1d1相切于c1点;所述第一阳转子圆弧c1d1圆心在阴阳转子圆心o1o2的连线上,点d1在阴阳转子圆心o1o2的连线上,与第二阳转子圆弧d1e1相切于d1点;所述第二阳转子圆弧d1e1圆心在阴阳转子圆心o1o2的连线上,第三阳转子包络线e1f1相切于e1点;所述第三阳转子包络线e1f1与第三阳转子圆弧f1g1相切于f1点。
11.进一步地,所述第一阴转子圆弧a2b2的圆心在阴转子圆心o2与点a2的连线上,阴转子第一阴转子圆弧a2b2与阴转子第二阴转子圆弧b2c2相切于b2点;所述第二阴转子圆弧b2c2与第三阴转子圆弧c2d2相切于c2点;所述第三阴转子圆弧c2d2圆心在阴阳转子圆心o1o2的连线上,点d2在阴阳转子圆心o1o2的连线上,与阴转子包络线d2e2相切于d2点;所述阴转子包络线d2e2与第四阴转子圆弧e2f2相切于e2点;所述第四阴转子圆弧e2f2的圆心在阴转子圆心o2与点f2的连线上,阴转子第四阴转子圆弧e2f2与阴转子第五阴转子圆弧f2g2相切于f2点。
12.进一步地,所述第三阳转子圆弧f1g1的点g1使角∠a1o1g1满足要求∠a1o1g1=360
°
/z1。
13.进一步地,所述第五阴转子圆弧f2g2中的点g2使角∠a2o2g2满足要求∠a2o2g2=360
°
/z2。
14.进一步地,所述阳转子型线和阴转子型线中圆弧的坐标方程如下:
[0015][0016]
式中,x:型线横坐标,单位为mm;y:型线纵坐标,单位mm;r:
[0017]
圆弧半径,单位为mm;t:圆弧角度,单位为度;a:圆弧对应的圆心横坐标,单位为mm;b:圆弧对应的圆心纵坐标,单位为mm。
[0018]
进一步地,所述阳转子型线和阴转子型线中包络线的坐标方程如下:
[0019][0020]
式中,x:型线横坐标,单位为mm;y:型线纵坐标,单位mm;r:
[0021]
圆弧半径,单位为mm;t:圆弧角度,单位为度;a:中心距,单位为mm;α:型线转动角度,单位为度;c1:阳转子动坐标到静止坐标的坐标变换系数;c2:阴阳转子齿数比;c3:阴转子动坐标到静止坐标的坐标变换系数;c4:阳转子动坐标到阴转子动坐标的变换系数。
[0022]
再进一步地,所述阳转子型线和阴转子型线中的圆弧和包络线均为互为共轭曲线。
[0023]
更进一步地,所述阳转子与阴转子的齿数比为4~6:5~8。
[0024]
与现有技术相比,本发明具有如下优点:
[0025]
其一,本发明阴阳转子型线的组成线均为二次曲线,从而使阴阳转子啮合时形成面密封,不仅大幅提升密封效果,还使得水蒸气通过微小间隙的密封面时不会产生较大的速度梯度差,显著降低启动噪音,而且更有利于转子的平稳啮合。
[0026]
其二,本发明设计的转子型线无直线、无尖点,便于转子的加工和运输保存,转子运行过程中,磨损少。
[0027]
其三,本发明的转子型线针对水蒸气螺杆产品的工况条件,对啮合间隙进行了分段加权设置,提高了水蒸气螺杆产品的性能。
[0028]
其四,本发明在型线设计中,使用角度作为控制参数,利用几何约束条件减少控制参数的数量,减少了控制参数的数量,降低了设计难度。
[0029]
其五,本发明在阴阳转子型线的组成曲线上,原生的圆弧曲线集中布置在阴转子上,提高型线生成的成功率。
[0030]
其六,本发明将原生曲线集中布置在一个转子上,并使用角度作为控制参数,大幅降低了型线的设计难度。
[0031]
其七,本发明专门为水蒸气这种螺杆产品的新兴应用领域进行设计的转子型线,不仅兼具传统第三代型线的优点,而且能大幅提高水蒸气螺杆产品的性能。
附图说明
[0032]
图1为一种水蒸气螺杆压缩机与膨胀机的转子型线的结构示意图。
具体实施方式
[0033]
下面结合实施案例详细说明本发明的实施情况,但它们并不构成对本发明的限定,仅作举例而已。同时通过说明本发明的优点将变得更加清楚和容易理解。
[0034]
如图1所示的一种水蒸气螺杆压缩机与膨胀机的转子型线,包括一对相互啮合的阳转子型线和阴转子型线,阳转子型线和阴转子型线均采用包络线与圆弧构成的双边不对称结构,组成线均为二次曲线;以o1为阳转子的中心,以o2为阴转子的中心建立坐标系,o1o2的距离为阳转子与阴转子的中心距a,阳转子、阴转子的齿数分别为z1、z2,阳转子、阴转子的齿高分别为rc1、rc2;阳转子的节圆半径r1w=a*z1/(z1 z2),阴转子的节圆半径r2w=a*z2/(z1 z2)。阳转子型线和阴转子型线中的圆弧和包络线均为互为共轭曲线。阳转子与阴转子的齿数比为4~6:5~8。本实施例中,阳、阴转子的齿数分别为z1=4、z2=6,阴阳转子的中心距a为200mm。
[0035]
阳转子型线由第一阳转子包络线a1b1、第二阳转子包络线b1c1、第一阳转子圆弧c1d1、第二阳转子圆弧d1e1、第三阳转子包络线e1f1和第三阳转子圆弧f1g1共六段二次曲线依次连接组成;第一阳转子包络线a1b1与第二阳转子包络线b1c1相切于b1点;第二阳转子包络线b1c1与第一阳转子圆弧c1d1相切于c1点;第一阳转子圆弧c1d1圆心在阴阳转子圆心o1o2的连线上,点d1在阴阳转子圆心o1o2的连线上,与第二阳转子圆弧d1e1相切于d1点;第二阳转子圆弧d1e1圆心在阴阳转子圆心o1o2的连线上,第三阳转子包络线e1f1相切于e1点;第三阳转子包络线e1f1与第三阳转子圆弧f1g1相切于f1点。第三阳转子圆弧f1g1的点g1使角∠a1o1g1满足要求∠a1o1g1=360
°
/z1。
[0036]
阴转子型线由第一阴转子圆弧a2b2、第二阴转子圆弧b2c2、第三阴转子圆弧c2d2、
阴转子包络线d2e2、第四阴转子圆弧e2f2和第五阴转子圆弧f2g2共六段二次曲线依次连接组成。第一阴转子圆弧a2b2的圆心在阴转子圆心o2与点a2的连线上,阴转子第一阴转子圆弧a2b2与阴转子第二阴转子圆弧b2c2相切于b2点;第二阴转子圆弧b2c2与第三阴转子圆弧c2d2相切于c2点;第三阴转子圆弧c2d2圆心在阴阳转子圆心o1o2的连线上,点d2在阴阳转子圆心o1o2的连线上,与阴转子包络线d2e2相切于d2点;阴转子包络线d2e2与第四阴转子圆弧e2f2相切于e2点;第四阴转子圆弧e2f2的圆心在阴转子圆心o2与点f2的连线上,阴转子第四阴转子圆弧e2f2与阴转子第五阴转子圆弧f2g2相切于f2点。第五阴转子圆弧f2g2中的点g2使角∠a2o2g2满足要求∠a2o2g2=360
°
/z2。
[0037]
上述技术方案中,阳转子型线中的第一阳转子圆弧c1d1、第二阳转子圆弧d1e1、第三阳转子圆弧f1g1以及阴转子型线中第一阴转子圆弧a2b2、第二阴转子圆弧b2c2、第三阴转子圆弧c2d2、第四阴转子圆弧e2f2和第五阴转子圆弧f2g2的坐标方程如下:
[0038][0039]
式中,x:型线横坐标,单位为mm;y:型线纵坐标,单位mm;r:
[0040]
圆弧半径,单位为mm;t:圆弧角度,单位为度;a:圆弧对应的圆心横坐标,单位为mm;b:圆弧对应的圆心纵坐标,单位为mm。
[0041]
上述技术方案中,阳转子型线中第一阳转子包络线a1b1、第二阳转子包络线b1c1、第三阳转子包络线e1f1和阴转子型线中阴转子包络线d2e2的坐标方程如下:
[0042][0043]
式中,x:型线横坐标,单位为mm;y:型线纵坐标,单位mm;r:
[0044]
圆弧半径,单位为mm;t:圆弧角度,单位为度;a:中心距,单位为mm;α:型线转动角度,单位为度;c1:阳转子动坐标到静止坐标的坐标变换系数;c2:阴阳转子齿数比;c3:阴转子动坐标到静止坐标的坐标变换系数;c4:阳转子动坐标到阴转子动坐标的变换系数。
[0045]
以上,仅为本发明的具体实施方式,应当指出,任何熟悉本领域的技术人员在本发明所揭示的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内,其余未详细说明的为现有技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。