1.本发明涉及斗轮机监测领域,具体地,涉及一种斗轮机作业状态的监测预警方法及系统。
背景技术:
2.目前,斗轮机已广泛应用于大型的堆场码头、电厂、煤场。在工业发展加快、劳动力成本增加的大环境下,各个企业都在进行斗轮机的无人化、自动化、智能化研究。研究设计一种对斗轮机作业状态进行智能化监测预警的方法,从而保障斗轮机的安全、有效运行,具有重要的现实意义。
3.现有技术中,存在针对斗轮机作业状态的监测准确性不足,进而造成斗轮机作业状态的监测效果不佳,无法对斗轮机作业状态进行及时、有效的预警的技术问题。
技术实现要素:
4.本技术提供了一种斗轮机作业状态的监测预警方法及系统。解决了现有技术中针对斗轮机作业状态的监测准确性不足,进而造成斗轮机作业状态的监测效果不佳,无法对斗轮机作业状态进行及时、有效的预警的技术问题。
5.鉴于上述问题,本技术提供了一种斗轮机作业状态的监测预警方法及系统。
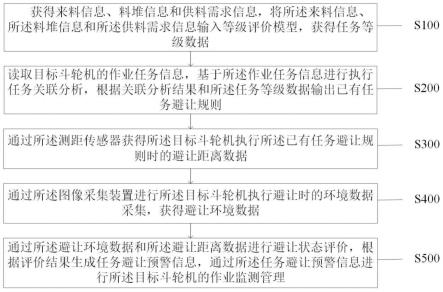
6.第一方面,本技术提供了一种斗轮机作业状态的监测预警方法,其中,所述方法应用于一种斗轮机作业状态的监测预警系统,所述方法包括:获得来料信息、料堆信息和供料需求信息,将所述来料信息、所述料堆信息和所述供料需求信息输入等级评价模型,获得任务等级数据;读取目标斗轮机的作业任务信息,基于所述作业任务信息进行执行任务关联分析,根据关联分析结果和所述任务等级数据输出已有任务避让规则;通过所述测距传感器获得所述目标斗轮机执行所述已有任务避让规则时的避让距离数据;通过所述图像采集装置进行所述目标斗轮机执行避让时的环境数据采集,获得避让环境数据;通过所述避让环境数据和所述避让距离数据进行避让状态评价,根据评价结果生成任务避让预警信息,通过所述任务避让预警信息进行所述目标斗轮机的作业监测管理。
7.第二方面,本技术还提供了一种斗轮机作业状态的监测预警系统,其中,所述系统包括:等级评价模块,所述等级评价模块用于获得来料信息、料堆信息和供料需求信息,将所述来料信息、所述料堆信息和所述供料需求信息输入等级评价模型,获得任务等级数据;关联分析模块,所述关联分析模块用于读取目标斗轮机的作业任务信息,基于所述作业任务信息进行执行任务关联分析,根据关联分析结果和所述任务等级数据输出已有任务避让规则;避让距离数据获得模块,所述避让距离数据获得模块用于通过所述测距传感器获得所述目标斗轮机执行所述已有任务避让规则时的避让距离数据;避让环境数据获得模块,所述避让环境数据获得模块用于通过所述图像采集装置进行所述目标斗轮机执行避让时的环境数据采集,获得避让环境数据;作业监测管理模块,所述作业监测管理模块用于通过所述避让环境数据和所述避让距离数据进行避让状态评价,根据评价结果生成任务避让预
警信息,通过所述任务避让预警信息进行所述目标斗轮机的作业监测管理。
8.本技术中提供的一个或多个技术方案,至少具有如下技术效果或优点:
9.通过等级评价模型对来料信息、料堆信息、供料需求信息进行评价,获得任务等级数据;读取目标斗轮机的作业任务信息,基于作业任务信息进行执行任务关联分析,根据关联分析结果和任务等级数据,输出已有任务避让规则;通过测距传感器,获得目标斗轮机执行已有任务避让规则时的避让距离数据;通过图像采集装置进行目标斗轮机执行避让时的环境数据采集,获得避让环境数据;通过避让环境数据和避让距离数据进行避让状态评价,根据评价结果生成任务避让预警信息,通过任务避让预警信息进行目标斗轮机的作业监测管理。达到了提高斗轮机作业状态的监测准确性,提高斗轮机作业状态的监测效果,实现对斗轮机作业状态进行及时、有效的预警,从而保障斗轮机的正常工作,提高斗轮机作业状态的安全性、稳定性的技术效果。
附图说明
10.图1为本技术一种斗轮机作业状态的监测预警方法的流程示意图;
11.图2为本技术一种斗轮机作业状态的监测预警方法中进行目标斗轮机充电和实时执行任务的排布调整的流程示意图;
12.图3为本技术一种斗轮机作业状态的监测预警方法中进行目标斗轮机的后续任务执行预警评价的流程示意图;
13.图4为本技术一种斗轮机作业状态的监测预警系统的结构示意图。
14.附图标记说明:等级评价模块11,关联分析模块12,避让距离数据获得模块13,避让环境数据获得模块14,作业监测管理模块15。
具体实施方式
15.本技术通过提供一种斗轮机作业状态的监测预警方法及系统。解决了现有技术中针对斗轮机作业状态的监测准确性不足,进而造成斗轮机作业状态的监测效果不佳,无法对斗轮机作业状态进行及时、有效的预警的技术问题。达到了提高斗轮机作业状态的监测准确性,提高斗轮机作业状态的监测效果,实现对斗轮机作业状态进行及时、有效的预警,从而保障斗轮机的正常工作,提高斗轮机作业状态的安全性、稳定性的技术效果。
16.实施例一
17.请参阅附图1,本技术提供一种斗轮机作业状态的监测预警方法,其中,所述方法应用于一种斗轮机作业状态的监测预警系统,所述系统与测距传感器、图像采集装置通信连接,所述方法具体包括如下步骤:
18.步骤s100:获得来料信息、料堆信息和供料需求信息,将所述来料信息、所述料堆信息和所述供料需求信息输入等级评价模型,获得任务等级数据;
19.步骤s200:读取目标斗轮机的作业任务信息,基于所述作业任务信息进行执行任务关联分析,根据关联分析结果和所述任务等级数据输出已有任务避让规则;
20.具体而言,将来料信息、料堆信息、供料需求信息作为输入信息,输入等级评价模型,获得任务等级数据。进一步,将目标斗轮机的作业任务信息进行关联分析,获得关联分析结果,结合任务等级数据,确定已有任务避让规则。其中,所述来料信息包括使用目标斗
轮机进行取料的物料类型、物料质量。所述料堆信息包括多个物料料堆的编号、料堆高度、料堆面积、料堆体积、料堆物料质量。所述供料需求信息包括来料信息与料堆信息之间的匹配关系、对应关系。所述等级评价模型经由大量与来料信息、料堆信息、供料需求信息相关的数据信息训练得到,具备对输入的来料信息、料堆信息、供料需求信息进行智能化分析及任务等级评定的功能。所述目标斗轮机为使用所述一种斗轮机作业状态的监测预警系统进行智能化监测预警的任意斗轮机。所述任务等级数据包括来料信息、料堆信息、供料需求信息对应的目标斗轮机的作业任务等级信息。所述作业任务信息包括目标斗轮机的作业点、取料量。所述关联分析结果包括目标斗轮机的运行路线信息,以及对目标斗轮机的运行具有障碍的人员、设备、料堆等障碍信息。所述已有任务避让规则包括目标斗轮机执行任务时,需要避让的人员、设备、料堆。已有任务避让规则主要用于避免目标斗轮机运行时,与人员、设备、料堆等障碍发生碰撞。达到了通过对目标斗轮机的作业任务信息、任务等级数据进行分析,获得可靠、适配的已有任务避让规则,保障目标斗轮机的安全运行的技术效果。
21.步骤s300:通过所述测距传感器获得所述目标斗轮机执行所述已有任务避让规则时的避让距离数据;
22.步骤s400:通过所述图像采集装置进行所述目标斗轮机执行避让时的环境数据采集,获得避让环境数据;
23.步骤s500:通过所述避让环境数据和所述避让距离数据进行避让状态评价,根据评价结果生成任务避让预警信息,通过所述任务避让预警信息进行所述目标斗轮机的作业监测管理。
24.具体而言,在目标斗轮机按照已有任务避让规则执行任务时,利用测距传感器、图像采集装置进行数据采集,获得避让距离数据、避让环境数据。进一步,基于避让环境数据、避让距离数据对目标斗轮机进行避让状态评价,获得评价结果,并根据评价结果生成任务避让预警信息,按照任务避让预警信息对目标斗轮机进行作业监测管理。其中,所述测距传感器、所述图像采集装置与所述一种斗轮机作业状态的监测预警系统通信连接。所述测距传感器可以为现有技术中的超声波测距仪、二维激光测距仪。所述图像采集装置可为现有技术中任意类型的能够采集获取图像信息的摄像装置或它们的结合。所述避让距离数据包括目标斗轮机执行已有任务避让规则时的避让距离参数信息。所述避让环境数据包括目标斗轮机执行已有任务避让规则时的避让障碍物类型、避让障碍物形状、避让障碍物图像。所述评价结果包括目标斗轮机的避让有效性、避让及时性。示例性地,当避让环境数据、避让距离数据表明目标斗轮机与人员、设备、料堆等障碍的距离较近,仍存在较大的碰撞风险时,此时,目标斗轮机的避让有效性较低、避让及时性较差,获得任务避让预警信息。所述任务避让预警信息用于表征目标斗轮机按照已有任务避让规则执行任务时,避让效果不佳,仍存在较大的碰撞风险,需要进一步对目标斗轮机进行避让管理。达到了在目标斗轮机按照已有任务避让规则执行任务时,利用测距传感器、图像采集装置进行数据采集,获得可靠的避让距离数据、避让环境数据,并根据其对目标斗轮机进行避让状态评价,适应性地生成任务避让预警信息,从而提高对目标斗轮机进行作业监测管理的准确性、适应性的技术效果。
25.进一步的,本技术步骤s500还包括:
26.步骤s510:通过所述测距传感器获得所述目标斗轮机的临时避让距离数据;
27.步骤s520:通过所述图像采集装置进行被避让物的行进速度采集,获得速度关联数据;
28.步骤s530:通过所述速度关联数据和所述临时避让距离数据进行所述目标斗轮机的避让响应灵敏度评价,根据响应灵敏度评价结果生成临时避让预警信息;
29.步骤s540:通过所述任务避让预警信息和所述临时避让预警信息进行所述目标斗轮机的作业监测管理。
30.具体而言,在目标斗轮机按照已有任务避让规则执行任务时,当目标斗轮机对障碍物进行临时避让时,利用测距传感器对目标斗轮机进行临时避让距离参数采集,获得临时避让距离数据。同时,利用图像采集装置对被避让物的行进速度进行采集,获得速度关联数据。进一步,基于速度关联数据和临时避让距离数据,对目标斗轮机进行避让响应灵敏度评价,获得响应灵敏度评价结果,并根据其生成临时避让预警信息,结合任务避让预警信息对目标斗轮机进行作业监测管理。其中,所述临时避让距离数据包括目标斗轮机对障碍物进行临时避让时的临时避让距离参数。所述被避让物包括人员、设备、料堆等障碍物。所述速度关联数据包括目标斗轮机对障碍物进行临时避让时,障碍物的行进速度参数。所述响应灵敏度评价结果包括目标斗轮机对障碍物进行临时避让的灵敏度、及时性。示例性地,当临时避让距离数据表明目标斗轮机与被避让物之间的距离较近,且,速度关联数据表明被避让物具有较高的行进速度时,目标斗轮机对障碍物进行临时避让的灵敏度较低、及时性较差,此时,获得临时避让预警信息。所述临时避让预警信息用于表征目标斗轮机对障碍物进行临时避让的效果不佳,目标斗轮机与被避让物之间存在较大的碰撞风险,需要进一步对目标斗轮机进行避让管理。达到了在目标斗轮机对障碍物进行临时避让时,通过速度关联数据和临时避让距离数据对目标斗轮机进行避让响应灵敏度评价,适应性地生成临时避让预警信息,提高目标斗轮机的作业监测管理的精确度,从而对斗轮机作业状态进行及时、有效的预警的技术效果。
31.进一步的,本技术步骤s540还包括:
32.步骤s541:获得所述目标斗轮机检测所述被避让物的检测距离节点;
33.步骤s542:获得所述目标斗轮机的行进速度数据和负载数据;
34.具体而言,在目标斗轮机对被避让物进行检测时,对目标斗轮机进行参数采集,获得检测距离节点、行进速度数据、负载数据。其中,所述检测距离节点包括目标斗轮机执行任务的距离信息。所述行进速度数据包括目标斗轮机的实时行进速度信息。所述负载数据包括目标斗轮机的实时负载类型、实时负载重量。达到了确定检测距离节点、行进速度数据、负载数据,为后续对检测距离节点、行进速度数据、负载数据进行匹配评价夯实基础的技术效果。
35.步骤s543:基于所述行进速度数据、所述负载数据和所述检测距离节点进行匹配评价,获得匹配评价结果;
36.进一步的,本技术步骤s543还包括:
37.步骤s5431:通过大数据构建匹配评价模型;
38.步骤s5432:将所述行进速度数据、所述负载数据和所述检测距离节点输入所述匹配评价模型进行匹配评价;
39.步骤s5433:获得所述匹配评价模型的输出结果,基于所述输出结果获得所述匹配
评价结果。
40.步骤s544:通过所述匹配评价结果生成执行任务与检测距离不匹配的预警信息。
41.具体而言,通过大数据采集训练数据,训练数据包括历史行进速度数据、历史负载数据、历史检测距离节点,通过将训练数据训练至收敛状态获得匹配评价模型,将行进速度数据、负载数据、检测距离节点作为输入信息,输入匹配评价模型,获得匹配评价模型的输出结果,所述输出结果包括匹配评价结果,并根据匹配评价结果生成预警信息。其中,所述匹配评价模型具有对输入的行进速度数据、负载数据、检测距离节点进行智能化分析及匹配评价的功能。所述匹配评价结果包括目标斗轮机执行任务与检测距离之间的匹配度参数信息。所述预警信息用于目标斗轮机执行任务与检测距离之间的匹配度较低时,对目标斗轮机进行执行任务与检测距离不匹配的预警。达到了通过匹配评价模型对行进速度数据、负载数据、检测距离节点进行匹配评价,获得匹配评价结果,并根据其进行执行任务与检测距离不匹配的预警,提高斗轮机作业状态的监测准确性、全面性的技术效果。
42.进一步的,本技术步骤s540之后,还包括:
43.步骤s550:通过所述图像采集装置进行临时避让后的所述目标斗轮机的图像采集,获得装料图像;
44.步骤s560:基于所述装料图像进行所述目标斗轮机的装料状态分析,获得当前状态评价结果;
45.步骤s570:判断所述当前状态评价结果是否满足装料约束阈值;
46.步骤s580:当不能满足所述装料约束阈值时,则根据所述当前状态评价结果生成装料预警信息。
47.具体而言,在目标斗轮机对障碍物进行临时避让后,利用图像采集装置对目标斗轮机进行图像采集,获得装料图像,并根据装料图像对目标斗轮机进行装料状态评价,获得当前状态评价结果。进一步,对当前状态评价结果是否满足装料约束阈值进行判断,如果当前状态评价结果不能满足装料约束阈值,获得装料预警信息。其中,所述装料图像包括目标斗轮机对障碍物进行临时避让后,目标斗轮机的承载物料图像数据。所述当前状态评价结果包括装料图像对应的目标斗轮机的承载物料质量信息。所述装料约束阈值包括预先设置确定的目标斗轮机的承载物料质量阈值。所述装料预警信息是用于表征当前状态评价结果不能满足装料约束阈值的预警提示信息。达到了通过装料图像对目标斗轮机进行装料状态评价,获得当前状态评价结果,结合装料约束阈值,适应性地生成装料预警信息,提高斗轮机作业状态预警的全面性、有效性的技术效果。
48.进一步的,如附图2所示,本技术步骤s500之后,还包括:
49.步骤s610:获得所述目标斗轮机的实时电量信息;
50.步骤s620:基于历史执行任务数据进行任务耗电分析,获得耗电分析数据;
51.步骤s630:通过所述耗电分析数据和所述实时电量信息生成充电预警数据;
52.步骤s640:基于所述充电预警数据进行所述目标斗轮机充电和实时执行任务的排布调整。
53.具体而言,对目标斗轮机进行实时电量参数采集,获得实时电量信息。进一步,根据历史执行任务数据、作业任务信息进行任务耗电分析,获得耗电分析数据,结合实时电量信息,生成充电预警数据。根据充电预警数据对目标斗轮机进行充电和实时执行任务的排
布调整。示例性地,在对目标斗轮机进行实时执行任务的排布调整时,可以按照充电预警数据对目标斗轮机的实时执行任务的排布时间、任务量进行调整。其中,所述实时电量信息包括目标斗轮机的实时电量参数。所述历史执行任务数据包括历史作业任务信息,以及历史作业任务信息对应的历史耗电分析数据。所述耗电分析数据包括目标斗轮机执行任务的实时累计耗电量。所述充电预警数据包括实时电量信息与耗电分析数据之间的差值信息。达到了通过充电预警数据对目标斗轮机进行充电和实时执行任务的排布调整,提高斗轮机作业状态监测的准确性、有效性、全面性的技术效果。
54.进一步的,如附图3所示,本技术步骤s500之后,还包括:
55.步骤s710:获得所述目标斗轮机的任务完成量数据、任务执行评价数据;
56.步骤s720:通过所述任务完成量数据和所述任务执行评价数据进行所述目标斗轮机的评级分析,获得评级分析结果;
57.步骤s730:通过所述评级分析结果进行所述目标斗轮机的后续任务执行预警评价。
58.具体而言,通过大数据采集目标斗轮机的任务完成量数据、任务执行评价数据,根据任务完成量数据、任务执行评价数据对目标斗轮机进行评级分析,获得评级分析结果,并根据评级分析结果对目标斗轮机进行后续任务执行预警评价。其中,所述任务完成量数据包括目标斗轮机的完成作业量、完成作业时间。所述任务执行评价数据包括目标斗轮机的完成作业评价质量、完成作业评价效率。所述评级分析结果包括目标斗轮机的等级信息。示例性地,目标斗轮机的完成作业量越多、完成作业评价质量越高,对应的目标斗轮机的等级信息越高。达到了通过任务完成量数据、任务执行评价数据对目标斗轮机进行评级分析,获得评级分析结果,为目标斗轮机的后续任务执行预警评价提供参考数据的技术效果。
59.综上所述,本技术所提供的一种斗轮机作业状态的监测预警方法具有如下技术效果:
60.1.通过等级评价模型对来料信息、料堆信息、供料需求信息进行评价,获得任务等级数据;读取目标斗轮机的作业任务信息,基于作业任务信息进行执行任务关联分析,根据关联分析结果和任务等级数据,输出已有任务避让规则;通过测距传感器,获得目标斗轮机执行已有任务避让规则时的避让距离数据;通过图像采集装置进行目标斗轮机执行避让时的环境数据采集,获得避让环境数据;通过避让环境数据和避让距离数据进行避让状态评价,根据评价结果生成任务避让预警信息,通过任务避让预警信息进行目标斗轮机的作业监测管理。达到了提高斗轮机作业状态的监测准确性,提高斗轮机作业状态的监测效果,实现对斗轮机作业状态进行及时、有效的预警,从而保障斗轮机的正常工作,提高斗轮机作业状态的安全性、稳定性的技术效果。
61.2.在目标斗轮机按照已有任务避让规则执行任务时,利用测距传感器、图像采集装置进行数据采集,获得可靠的避让距离数据、避让环境数据,并根据其对目标斗轮机进行避让状态评价,适应性地生成任务避让预警信息,从而提高对目标斗轮机进行作业监测管理的准确性、适应性。
62.3.在目标斗轮机对障碍物进行临时避让时,通过速度关联数据和临时避让距离数据对目标斗轮机进行避让响应灵敏度评价,适应性地生成临时避让预警信息,提高目标斗轮机的作业监测管理的精确度,从而对斗轮机作业状态进行及时、有效的预警。
63.实施例二
64.基于与前述实施例中一种斗轮机作业状态的监测预警方法,同样发明构思,本发明还提供了一种斗轮机作业状态的监测预警系统,请参阅附图4,所述系统包括:
65.等级评价模块11,所述等级评价模块11用于获得来料信息、料堆信息和供料需求信息,将所述来料信息、所述料堆信息和所述供料需求信息输入等级评价模型,获得任务等级数据;
66.关联分析模块12,所述关联分析模块12用于读取目标斗轮机的作业任务信息,基于所述作业任务信息进行执行任务关联分析,根据关联分析结果和所述任务等级数据输出已有任务避让规则;
67.避让距离数据获得模块13,所述避让距离数据获得模块13用于通过所述测距传感器获得所述目标斗轮机执行所述已有任务避让规则时的避让距离数据;
68.避让环境数据获得模块14,所述避让环境数据获得模块14用于通过所述图像采集装置进行所述目标斗轮机执行避让时的环境数据采集,获得避让环境数据;
69.作业监测管理模块15,所述作业监测管理模块15用于通过所述避让环境数据和所述避让距离数据进行避让状态评价,根据评价结果生成任务避让预警信息,通过所述任务避让预警信息进行所述目标斗轮机的作业监测管理。
70.进一步的,所述系统还包括:
71.临时避让数据获得模块,所述临时避让数据获得模块用于通过所述测距传感器获得所述目标斗轮机的临时避让距离数据;
72.行进速度采集模块,所述行进速度采集模块用于通过所述图像采集装置进行被避让物的行进速度采集,获得速度关联数据;
73.临时避让预警信息生成模块,所述临时避让预警信息生成模块用于通过所述速度关联数据和所述临时避让距离数据进行所述目标斗轮机的避让响应灵敏度评价,根据响应灵敏度评价结果生成临时避让预警信息;
74.避让预警模块,所述避让预警模块用于通过所述任务避让预警信息和所述临时避让预警信息进行所述目标斗轮机的作业监测管理。
75.进一步的,所述系统还包括:
76.检测距离节点获得模块,所述检测距离节点获得模块用于获得所述目标斗轮机检测所述被避让物的检测距离节点;
77.行进数据获得模块,所述行进数据获得模块用于获得所述目标斗轮机的行进速度数据和负载数据;
78.匹配评价模块,所述匹配评价模块用于基于所述行进速度数据、所述负载数据和所述检测距离节点进行匹配评价,获得匹配评价结果;
79.预警信息生成模块,所述预警信息生成模块用于通过所述匹配评价结果生成执行任务与检测距离不匹配的预警信息。
80.进一步的,所述系统还包括:
81.图像采集模块,所述图像采集模块用于通过所述图像采集装置进行临时避让后的所述目标斗轮机的图像采集,获得装料图像;
82.装料状态分析模块,所述装料状态分析模块用于基于所述装料图像进行所述目标
斗轮机的装料状态分析,获得当前状态评价结果;
83.阈值判断模块,所述阈值判断模块用于判断所述当前状态评价结果是否满足装料约束阈值;
84.装料预警信息生成模块,所述装料预警信息生成模块用于当不能满足所述装料约束阈值时,则根据所述当前状态评价结果生成装料预警信息。
85.进一步的,所述系统还包括:
86.实时电量信息获得模块,所述实时电量信息获得模块用于获得所述目标斗轮机的实时电量信息;
87.任务耗电分析模块,所述任务耗电分析模块用于基于历史执行任务数据进行任务耗电分析,获得耗电分析数据;
88.充电预警数据生成模块,所述充电预警数据生成模块用于通过所述耗电分析数据和所述实时电量信息生成充电预警数据;
89.排布调整模块,所述排布调整模块用于基于所述充电预警数据进行所述目标斗轮机充电和实时执行任务的排布调整。
90.进一步的,所述系统还包括:
91.任务数据获得模块,所述任务数据获得模块用于获得所述目标斗轮机的任务完成量数据、任务执行评价数据;
92.评级分析模块,所述评级分析模块用于通过所述任务完成量数据和所述任务执行评价数据进行所述目标斗轮机的评级分析,获得评级分析结果;
93.预警评价模块,所述预警评价模块用于通过所述评级分析结果进行所述目标斗轮机的后续任务执行预警评价。
94.进一步的,所述系统还包括:
95.构建模块,所述构建模块用于通过大数据构建匹配评价模型;
96.数据匹配评价模块,所述数据匹配评价模块用于将所述行进速度数据、所述负载数据和所述检测距离节点输入所述匹配评价模型进行匹配评价;
97.匹配评价结果获得模块,所述匹配评价结果获得模块用于获得所述匹配评价模型的输出结果,基于所述输出结果获得所述匹配评价结果。
98.本技术提供了一种斗轮机作业状态的监测预警方法,其中,所述方法应用于一种斗轮机作业状态的监测预警系统,所述方法包括:通过等级评价模型对来料信息、料堆信息、供料需求信息进行评价,获得任务等级数据;读取目标斗轮机的作业任务信息,基于作业任务信息进行执行任务关联分析,根据关联分析结果和任务等级数据,输出已有任务避让规则;通过测距传感器,获得目标斗轮机执行已有任务避让规则时的避让距离数据;通过图像采集装置进行目标斗轮机执行避让时的环境数据采集,获得避让环境数据;通过避让环境数据和避让距离数据进行避让状态评价,根据评价结果生成任务避让预警信息,通过任务避让预警信息进行目标斗轮机的作业监测管理。解决了现有技术中针对斗轮机作业状态的监测准确性不足,进而造成斗轮机作业状态的监测效果不佳,无法对斗轮机作业状态进行及时、有效的预警的技术问题。达到了提高斗轮机作业状态的监测准确性,提高斗轮机作业状态的监测效果,实现对斗轮机作业状态进行及时、有效的预警,从而保障斗轮机的正常工作,提高斗轮机作业状态的安全性、稳定性的技术效果。
99.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
100.本说明书和附图仅仅是本技术的示例性说明,如果本发明的修改和变型属于本发明及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。