一种基于3dvfh算法的室内自主飞行器避障装置
技术领域
1.本发明涉及人工智能应用技术领域,具体为一种基于3dvfh算法的室内自主飞行器避障装置。
背景技术:
2.随着科技与经济的快速发展,四旋翼飞行器也逐渐运用于各个领域。飞行器的现实三维场景复杂度和三维运动特性极大的拓展了飞行器自动化领域发展方向。目前较为成熟的无人机自主飞行方案是基于gps定位系统并结合气压计、惯性测量单元(imu)进行导航,再辅以红外传感器等进行简单避障。但是这种方案由于无人机缺乏可靠的环境感知能力,只能适用于高空障碍物较少的作业环境,且要求控制精度不高的任务,只能用于航拍、测绘等领域。而且由于这种方案高度依赖于卫星gps信号,在无人机与卫星之间存在遮挡时会导致定位失效,容易发生危险。而且单目相机测量范围窄且视野小,2d激光雷达只能实时导航,无法成像,故飞行器无法进行三维自主飞行避障。
3.因此,给无人机增加用于环境感知的3d传感器,例如双目视觉摄像头、3d激光雷达等等。赋予无人机环境感知甚至是环境构建的能力,并在此基础上发展室内复杂环境下的无人机自主避障飞行能力已经成为无人机的一个重要研究方向。
技术实现要素:
4.本发明提供一种安全可靠、高精度的基于3dvfh算法的室内自主飞行器避障装置。
5.为实现上述目的,本发明提供如下技术方案:一种基于3dvfh算法的室内自主飞行器避障装置,搭载自主飞行单元,所述自主飞行单元包括用于视觉定位的实感摄像头和用于位置数据采集的激光雷达,以及控制板;
6.其中,所述控制板内含有3dvfh算法,3dvfh算法对采集的数据进行处理,并进行坐标转换,实时计算设定避障路径;
7.所述控制板基于避障路径实时对飞行器姿态和位置进行控制。
8.优选的,所述自主飞行单元基于机器人操作系统和mavros构建通信网络系统。
9.优选的,所述3dvfh算法包括转换模块,所述转换模块将采集的数据转化为特定空间范围内的octomap数据,并将地图坐标系转换为无人机机体坐标系。
10.优选的,3dvfh算法包括避障路线权重计算模块,所述避障路线权重计算模块,根据octomap数据节点的占用率、位置等信息,进行了二维直方图内权重的构建。
11.优选的,所述3dvfh算法包括避障路径设定模块,所述避障路径设定模块采用滑动窗口的方式检测二维直方图中无人机飞行的备选方向。
12.与现有技术相比,本发明的有益效果:本发明飞行器在室内飞行中,克服了室内gps信号较弱的问题,实现了飞行器在室内一键起飞、自主悬停、自主飞行和自主降落功能,且飞行器能够按照预定飞行路线直线飞行,系统定位精度高、稳定性强,对于室内智能物流配送飞行器的实现具有很好的借鉴意义;
13.另外,通过3dvfh算法避障飞行模块能够按照预期控制飞行器沿着全局路径飞行,并在过程中探测并避开全局地图中没有标注的动态障碍物。
附图说明
14.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
15.在附图中:
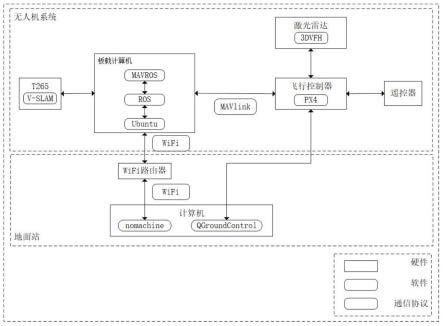
16.图1是本发明飞行器避障装置软件系统示意图;
17.图2是本发明3dvfh算法的框图。
具体实施方式
18.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
19.实施例:如图1所示,一种基于3dvfh算法的室内自主飞行器避障装置,搭载自主飞行单元,自主飞行单元包括用于视觉定位的实感摄像头和用于位置数据采集的激光雷达,以及控制板;
20.自主飞行单元基于机器人操作系统(robotoperatingsystem,ros)和mavros构建了通信网络系统,并选用英伟达jetsonnano运行该系统,采用pixhawk4飞行控制板运行核心控制部分,基于英特尔追踪实感摄像头t265的位置信息;
21.参考图2所示,控制板内含有3dvfh算法,3dvfh算法包括:
22.转换模块,由直通滤波器预处理激光雷达点云数据,将其转换为特定空间范围内的octomap数据,大大减小了环境数据的规模,为了控制飞行器向目标点飞行,需确定在飞行器视角下,当前目标点所处的位置,因此将地图坐标系转换为无人机机体坐标系;
23.避障路线权重计算模块,根据octomap数据节点的占用率、位置等信息,进行了二维直方图内权重的构建,完成了对感知到的三维障碍物进行降维的工作;
24.避障路径设定模块,避障路径设定模块采用滑动窗口的方式检测二维直方图中无人机飞行的备选方向,确定哪些方向是安全的,择取最优飞行路径并控制飞行器的飞行速度;
25.在一具体飞行避障案例中:jetsonnano机载电脑实时处理t265视觉定位和360
°
探测障碍物的激光雷达采集的位置数据,再经过控制板imu位置信息的融合进行位置估计,最后,控制板接收板载计算机控制指令后对飞行器姿态和位置进行控制,从而进行实时避障,提高了飞行器室内gps信号缺失以及复杂环境下的自主飞行避障能力。
26.最后应说明的是:以上所述仅为本发明的优选实例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种基于3dvfh算法的室内自主飞行器避障装置,搭载自主飞行单元,其特征在于:所述自主飞行单元包括用于视觉定位的实感摄像头和用于位置数据采集的激光雷达,以及控制板;其中,所述控制板内含有3dvfh算法,3dvfh算法对采集的数据进行处理,并进行坐标转换,实时计算设定避障路径;所述控制板基于避障路径实时对飞行器姿态和位置进行控制。2.根据权利要求1所述的一种基于3dvfh算法的室内自主飞行器避障装置,其特征在于:所述自主飞行单元基于机器人操作系统和mavros构建通信网络系统。3.根据权利要求1所述的一种基于3dvfh算法的室内自主飞行器避障装置,其特征在于:所述3dvfh算法包括转换模块,所述转换模块将采集的数据转化为特定空间范围内的octomap数据,并将地图坐标系转换为无人机机体坐标系。4.根据权利要求1所述的一种基于3dvfh算法的室内自主飞行器避障装置,其特征在于:3dvfh算法包括避障路线权重计算模块,所述避障路线权重计算模块,根据octomap数据节点的占用率、位置等信息,进行了二维直方图内权重的构建。5.根据权利要求1所述的一种基于3dvfh算法的室内自主飞行器避障装置,其特征在于:所述3dvfh算法包括避障路径设定模块,所述避障路径设定模块采用滑动窗口的方式检测二维直方图中无人机飞行的备选方向。
技术总结
本发明公开了一种基于3DVFH算法的室内自主飞行器避障装置,飞行器搭载自主飞行单元,自主飞行单元包括用于视觉定位的实感摄像头和用于位置数据采集的激光雷达,以及控制板;其中,制板内含有3DVFH算法,3DVFH算法对采集的数据进行处理,并进行坐标转换,实时计算设定避障路径;控制板基于避障路径实时对飞行器姿态和位置进行控制;克服了室内GPS信号较弱的问题,能够按照预定飞行路线直线飞行,系统定位精度高、稳定性强,对于室内智能物流配送飞行器的实现具有很好的借鉴意义;通过3DVFH算法避障飞行模块能够按照预期控制飞行器沿着全局路径飞行,并在过程中探测并避开全局地图中没有标注的动态障碍物。图中没有标注的动态障碍物。图中没有标注的动态障碍物。
技术研发人员:董天天 肖钱宇 黄乙 林天洋
受保护的技术使用者:江苏信息职业技术学院
技术研发日:2022.11.01
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
