一种基于自动驾驶多核异构冗余高速车载通信的l4l3域控制器平台
技术领域
1.本发明属于自动驾驶技术领域,具体涉及一种基于自动驾驶多核异构冗余高速车载通信的l4l3域控制器平台。
背景技术:
2.随着自动驾驶技术的飞速发展,l2 已经满足不了人们对自动驾驶功能的要求。本发明主要针对l4/l3多核异构自动驾驶域控制器系统,并且用以太网sgmii/rgmii 等接口对pcie 互相构成高速车载通信冗余。当多核异构的系统需要高速通信的时候,pcie3.0接口可以提供8gbps的高速有效通信。当pcie通信失效的时候,车载级的千兆以太网swith提供了另一个高速冗余通道。
3.目前乘用车和商用车的l2 自动驾驶常规方案:1. 使用tda4vm mcu芯片实现自动泊车或者单目前视;2. 在1的基础上增加地平线j3等芯片实现单目前视 环视;方案1的缺点是,平台算力只有8tops,只能实现4路环视和自主泊车或远程泊车,或者单目前视。
4.方案2的缺点是,只能实现单目前视加四路环视。由于ai算力限制无法应用到l3及以上的高价自动驾驶域控制器平台。
技术实现要素:
5.本发明所要解决的技术问题是,克服现有技术的缺点,提供一种基于自动驾驶多核异构冗余高速车载通信的l4l3域控制器平台,通过多核异构的新型系统平台架构实现高ai算力,通过车载以太网switch1和swith2实现处理器之间的高速通信,通过pcie总线实现多个处理器之间的高速通信。
6.为了解决以上技术问题,本发明提供一种基于自动驾驶多核异构冗余高速车载通信的l4l3域控制器平台,包括第一soc1、第二soc2、第三soc3、第四soc4;第一soc1、第二soc2、第三soc3和第四soc4分别于mcu通讯连接;第一soc1、第二soc2和第三soc3,用于处理周视的视觉感知和视觉定位;第四soc4,用于处理环视视觉感知;第一以太网sw1和第二以太网sw2构成多路千兆以太网swich,多路千兆以太网swich,具备12路百兆车载以太网100base-t1,用于传输外部的4d毫米波雷达点云数据;具备8路千兆车载以太网1000bast-t1用于传输外部的激光雷达点云数据,并且用于和ibox,以及其他的自动驾驶域控制器通信连接;具备四路rgmii, 用于第一soc1,第二soc2,第三soc3,第四soc4和mcu 之间高速通信。
7.本发明进一步限定的技术方案是:第一soc1连接两路摄像头,第二soc2连接四路摄像头,第三soc3连接一路摄像头,第四soc4连接六路摄像头,14路的摄像头输入实现视觉
感知和激光雷达感知的融合。
8.进一步的,多路千兆以太网swich中多余的sgmii 用于扩展工业以太网用于调试或者转换为rgmii连接mcu的rgmii接口。
9.进一步的,第一soc1,第二soc2,第三soc3和第四soc4之间通过pcie总线实现多核之间的高速通信;当多个soc之间的以太网通信失效时,pcie通信构成冗余。
10.进一步的,pcie总线用于冗余备份,pcie的通信可以使用芯片自带的pcie接口或通过pcie swith构成可扩展的高速通信链路。
11.进一步的,第一soc1、第二soc2、第三soc3和第四soc4采用a1000芯片,a1000芯片的ai算力为53tops,最高可达212topsai算力。
12.本发明的有益效果是:通过多核异构的新型系统平台架构实现高ai算力,本发明例采用4个黑芝麻a1000,每个a1000的ai算力为53tops,最高可大212topsai算力;符合大多数l3或者l4自动驾驶域控制器的算力需求;可以实现12至14路的周视和环视摄像头感知输入,最多8路激光雷达点云输入,最多12路4d毫米波雷达点云输入。
13.通过车载以太网switch1和swith2实现处理器之间的高速通信,并且可以接收高分辨率激光雷达和毫米波雷达点云数据;通过pcie总线可以实现多个处理器之间的高速通信,以实现视觉感知和激光雷达感知的前融合,并且对以太网通信构成冗余备份;特别的,soc之间的pcie通信也可以通过pcie switch实现。
附图说明
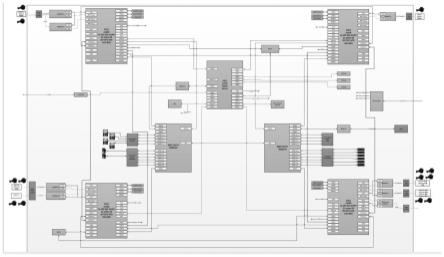
14.图1为本发明的结构应用框架示意图。
具体实施方式
15.实施例1请参阅图1,本实施例提供一种基于自动驾驶多核异构冗余高速车载通信的l4l3域控制器平台,包括第一soc1、第二soc2、第三soc3、第四soc4;第一soc1、第二soc2、第三soc3和第四soc4分别于mcu通讯连接;第一soc1、第二soc2和第三soc3,用于处理周视的视觉感知和视觉定位;第四soc4,用于处理环视视觉感知;第一以太网sw1和第二以太网sw2构成多路千兆以太网swich,多路千兆以太网swich,具备12路百兆车载以太网100base-t1,用于传输外部的4d毫米波雷达点云数据;具备8路千兆车载以太网1000bast-t1用于传输外部的激光雷达点云数据,并且用于和ibox,以及其他的自动驾驶域控制器通信连接;具备四路rgmii, 用于第一soc1,第二soc2,第三soc3,第四soc4和mcu 之间高速通信。
16.第一soc1连接两路摄像头,第二soc2连接四路摄像头,第三soc3连接一路摄像头,第四soc4连接六路摄像头,14路的摄像头输入实现视觉感知和激光雷达感知的融合。
17.多路千兆以太网swich中多余的sgmii 用于扩展工业以太网用于调试或者转换为
rgmii连接mcu的rgmii接口。
18.第一soc1,第二soc2,第三soc3和第四soc4之间通过pcie总线实现多核之间的高速通信;当多个soc之间的以太网通信失效时,pcie通信构成冗余。
19.pcie总线用于冗余备份,pcie的通信可以使用芯片自带的pcie接口或通过pcie swith构成可扩展的高速通信链路。
20.第一soc1、第二soc2、第三soc3和第四soc4采用a1000芯片,a1000芯片的ai算力为53tops,最高可达212topsai算力。
21.当以太网swith1和swith2 失效的时候,pcie总线可以起到冗余备份的作用。pcie的通信除了使用芯片自带的pcie接口外,还可以通过pcie swith构成更为可扩展的高速通信链路,而且能避免单一节点失效的时候带来的通信问题。
22.平台系统中第一soc1、第二soc2、第三soc3分别处理周视的视觉感知和视觉定位。第四soc4处理环视视觉感知。激光雷达的感知、定位可以视算力消耗的情况灵活部署到合适的soc。mcu处理规划控制,并处理6个毫米波雷达的目标数据。
23.以太网sw1和以太网sw2共同构成多路的千兆以太网swich。具备12路百兆车载以太网100base-t1,用于传输外部的4d毫米波雷达点云数据。具备8路的千兆车载以太网1000bast-t1用于传输外部的激光雷达点云数据,并且用于和ibox,以及其他的自动驾驶域控制器通信。具备四路rgmii, 可以用于soc1,soc2,soc3,soc4,mcu 之间高速通信,多余的sgmii 用于扩展工业以太网用于调试或者连接mcu的rgmii接口(需要sgmii转换为rgmii)。特别的,soc1,soc2,soc3,soc4之间通过pcie总线实现多核之间的高速通信,增加了系统的可靠性。当多个soc之间的以太网通信失效的时候,pice通信构成冗余备份;反之亦然。
24.每个黑芝麻a1000的算力高达53tops,外接摄像头可以扩展至12到14路。
25.12路至14路的摄像头输入可以构成一定的视觉冗余,其中soc1支持两路的前视摄像头,当其中一个摄像头失效的时候,另外一路摄像头可以起到部分的冗余的效果。当两路摄像头都失效的时候,前视激光雷达的点云数据可以构成部分的冗余。
26.通过最多14路的摄像头输入实现视觉感知和激光雷达感知的融合,可以实现高可靠的感知结果输出。另外4d毫米波雷达对近距离的感知有部分冗余的效果。
27.除上述实施例外,本发明还可以有其他实施方式。凡采用等同替换或等效变换形成的技术方案,均落在本发明要求的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。