1.本发明涉及无人机巡检技术领域,特别涉及一种配网电路巡检的移动无人机和机巢管控系统。
背景技术:
2.目前,我国无人机市场已发展了将近30余年,从最初的军用领域逐渐扩展到消费领域。目前国内消费无人机市场火热,普通民众对无人机的认可程度和需求度逐渐攀升,过去两年来,无人机企业、融资次数、飞机数量和产品用途都有了明显的增多,甚至出现了指数型增长,监管制度方面也有了进一步地完善。未来五年民用无人机行业将持续保持较快的发展态势,除了军用目的,无人机的民用市场非常广阔,其中包括警用、城市管理、农业、地质、气象、电力、抢险救灾、视频拍摄等广泛领域。例如在电力巡检领域,装配有高清数码摄像机和照相机以及gps定位系统的无人机,可沿电网进行定位自主巡航,实时传送拍摄影像,监控人员可在电脑上同步收看与操控。
3.目前常见的无人机巡检系统,大多设置有固定的无人机机巢,在日常作业时按照预设的巡检路线进行巡检,但是在农村配网电路巡检路线复杂,无人机的续航不足,而且建立固定无人机机巢成本较高,在发生突发故障时,若是仍旧按预设的巡检路线进行检查,大大延长了故障排除时间。
技术实现要素:
4.本发明的目的是提供一种配网电路巡检的移动无人机和机巢管控系统,其具有提升巡检效率,缩短故障排查时间的优点。
5.本发明的上述技术目的是通过以下技术方案得以实现的:
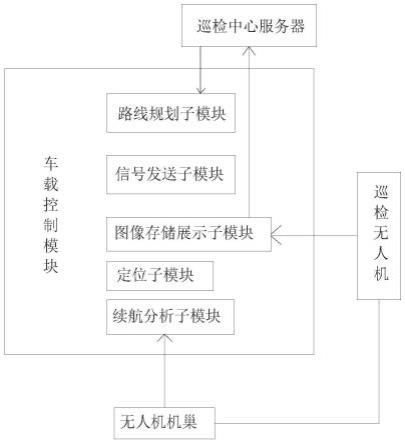
6.一种配网电路巡检的移动无人机和机巢管控系统,包括:巡检中心服务器、巡检无人机和巡检车,
7.所述巡检车上设置有无人机机巢和车载控制模块,所述无人机机巢用于供巡检无人机停靠及为所述巡检无人机充电,所述车载控制模块包括定位子模块、路线规划子模块、信号发送子模块和图像存储展示子模块,
8.所述定位子模块用于获取巡检车的实时定位信息,所述实时定位信息表征巡检车所处的实时位置;
9.所述路线规划子模块预存有巡检区域的地图信息及输电线路信息,所述路线规划子模块用于接收巡检中心服务器发送的巡检指令,所述巡检指令包括故障点位信息,并根据地图信息、输电线路信息、实时定位信息及故障点位信息生成巡检路径及导航路径,所述巡检路径为包括巡航起点及巡航终点的巡检无人机飞行线路,所述导航路径为引导所述巡检车到达巡航起点的路线;
10.所述信号发送子模块用于向所述巡检无人机发送巡航控制指令,所述巡航控制指令包括自动巡航指令,所述巡检车到达巡航起点后所述信号发送子模块向所述巡检无人机
发送自动巡航指令,所述自动巡航指令包括巡检路径;
11.所述图像存储展示子模块用于图像数据的存储及展示,在所述巡检无人机返航至所述无人机机巢后,所述图像存储展示子模块将存储的图像上传至巡检中心服务器;
12.所述巡检无人机根据巡检路径进行巡检飞行并采集巡检路径上的图像数据;
13.所述巡检中心服务器用于向车载控制模块发送巡检指令及用于图像数据的接收存储及分析。
14.进一步设置:所述车载控制模块还包括区域判断子模块,所述区域判断子模块根据所述巡检路径判断巡检无人机的飞行线路是否经过禁飞区,若经过禁飞区则所述区域判断子模块通过公安的申请接口申请在禁飞区内的作业许可。
15.进一步设置:所述路线规划子模块包括存储单元、划分单元和规划单元,
16.所述存储单元用于储存巡检区域的地图信息及输电线路信息;
17.所述划分单元根据地图信息、输电线路信息、故障点位信息划分重点巡检区域和两个次级巡检区域,两个所述次级巡检区域分别位于重点巡检区域的两端;
18.所述规划单元根据所述实时定位信息、重点巡检区域及次级巡检区域生成巡航起点、巡航终点、导航路径及巡检路径,所述巡检路径包括初检路径、复检路径及返航路径,所述重点巡检区域靠近巡航起点的一端为第一边界,另一端为第二边界,所述初检路径具体为从巡航起点至第二边界的飞行线路,所述复检路径具体为从第二边界至第一边界的飞行线路,所述返航路径具体为从第一边界至巡航终点的飞行线路。
19.进一步设置:所述重点巡检区域为以故障点位信息所示的位置为起点沿输电线路的两端方向分别延伸第一预设距离所形成的区域,所述次级巡检区域为以重点巡检区域两端为起点分别沿输电线路且远离重点巡检区域的方向延伸第二预设距离所形成的区域。
20.进一步设置:所述规划单元生成巡航起点、巡航重点及导航路径的具体包括如下步骤:
21.获取两个次级巡检区域远离重点巡检区域的一端的一个坐标为检测点位并获取检测点位的坐标信息;
22.根据两个坐标信息及实时定位信息计算得到两个检测点位至巡检车的距离;
23.比较两个检测点位至巡检车的距离,距离较小的检测点位对应的一端作为巡航起点,另一端作为巡航终点;
24.根据巡航起点、地图信息及实时定位信息生成引导所述巡检车到达巡航起点的导航路径。
25.进一步设置:所述无人机机巢包括电量监测模块,所述无人机机巢为所述巡检无人机充电时所述电量监测模块监测巡检无人机的实时电量并生成电量信息发送至车载控制模块,所述车载控制模块还包括续航分析子模块,所述续航分析子模块预存有第一预设距离及无人机参数,所述无人机参数包括无人机预设飞行速度及电量消耗速率,所述续航分析子模块根据第一预设距离、无人机参数及电量信息计算生成第二预设距离。
26.进一步设置:所述续航分析子模块计算生成第二预设距离具体包括如下步骤:
27.根据第一预设距离、无人机参数计算得到第一预设消耗电量;
28.比较第一预设消耗电量及电量信息,若第一预设消耗电量小于电量信息,则根据第一预设消耗电量及电量信息计算得到剩余电量,并根据剩余电量及无人机参数计算得到
第二预设距离,并向信号发送子模块发送启动信号;
29.若第一预设消耗电量大于等于电量信息,则向信号发送子模块发送充电信号,直至电量信息到达预设基础电量时向信号发送子模块发送启动信号;
30.所述信号发送子模块接收到启动信号后向所述巡检无人机发送巡航控制指令,所述信号发送子模块接收到充电信号向图像存储展示子模块发送提醒信息,所述图像存储展示子模块接收提醒信息并展示提醒操作人员巡检无人机电量不足充电中。
31.进一步设置:所述车载控制模块还包括指令输入子模块,所述指令输入子模块用于供操作人员输入操作指令并根据输入的操作指令生成对应的巡航控制指令至信号发送子模块。
32.综上所述,本发明具有以下有益效果:将无人机机巢设置在巡检车上使巡检无人机和无人机机巢可以根据需要随巡检车移动,降低了建设固定机巢的成本,在出现突发故障时可以快速针对故障点规划巡检路径,由巡检车带巡检无人机和无人机机巢至最佳起飞点,提高了故障排除的效率。同时设置在巡检车上的无人机机巢可以随时为巡检无人机进行充电,可以对任意位置的故障线路进行排插,解决了巡检无人机的续航问题。
附图说明
33.图1是实施例整体结构框图;
34.图2是实施例中重点巡检区域及次级巡检区域划分示意图。
35.图中,1、次级巡检区域;2、重点巡检区域;3、目标点位;4、巡检车;5、巡航起点;6、巡航终点;7、第一边界;8、第二边界。
具体实施方式
36.以下结合附图对本发明作进一步详细说明。
37.实施例:
38.如图1所示,一种配网电路巡检的移动无人机和机巢管控系统,包括:巡检中心服务器、巡检无人机和巡检车4,
39.所述巡检车4上设置有无人机机巢和车载控制模块,所述无人机机巢用于供巡检无人机停靠及为所述巡检无人机充电,所述车载控制模块包括定位子模块、路线规划子模块、信号发送子模块和图像存储展示子模块,
40.所述定位子模块用于获取巡检车4的实时定位信息,所述实时定位信息表征巡检车4所处的实时位置;
41.所述路线规划子模块预存有巡检区域的地图信息及输电线路信息,所述路线规划子模块用于接收巡检中心服务器发送的巡检指令,所述巡检指令包括故障点位信息,并根据地图信息、输电线路信息、实时定位信息及故障点位信息生成巡检路径及导航路径,所述巡检路径为包括巡航起点5及巡航终点6的巡检无人机飞行线路,所述导航路径为引导所述巡检车4到达巡航起点5的路线;
42.所述信号发送子模块用于向所述巡检无人机发送巡航控制指令,所述巡航控制指令包括自动巡航指令,所述巡检车4到达巡航起点5后所述信号发送子模块向所述巡检无人机发送自动巡航指令,所述自动巡航指令包括巡检路径;
43.所述图像存储展示子模块用于图像数据的存储及展示,在所述巡检无人机返航至所述无人机机巢后,所述图像存储展示子模块将存储的图像上传至巡检中心服务器;
44.所述巡检无人机根据巡检路径进行巡检飞行并采集巡检路径上的图像数据;
45.所述巡检中心服务器用于向车载控制模块发送巡检指令及用于图像数据的接收存储及分析。
46.所述车载控制模块还包括区域判断子模块,所述区域判断子模块根据所述巡检路径判断巡检无人机的飞行线路是否经过禁飞区,若经过禁飞区则所述区域判断子模块通过公安的申请接口申请在禁飞区内的作业许可。
47.所述路线规划子模块包括存储单元、划分单元和规划单元,
48.所述存储单元用于储存巡检区域的地图信息及输电线路信息;
49.所述划分单元根据地图信息、输电线路信息、故障点位信息划分重点巡检区域2和两个次级巡检区域1,两个所述次级巡检区域1分别位于重点巡检区域2的两端;
50.所述规划单元根据所述实时定位信息、重点巡检区域2及次级巡检区域1生成巡航起点5、巡航终点6、导航路径及巡检路径,所述巡检路径包括初检路径、复检路径及返航路径,所述重点巡检区域2靠近巡航起点5的一端为第一边界7,另一端为第二边界8,所述初检路径具体为从巡航起点5至第二边界8的飞行线路,所述复检路径具体为从第二边界8至第一边界7的飞行线路,所述返航路径具体为从第一边界7至巡航终点6的飞行线路。
51.所述重点巡检区域2为以故障点位信息所示的位置即目标点位3为起点沿输电线路的两端方向分别延伸第一预设距离所形成的区域,所述次级巡检区域1为以重点巡检区域2两端为起点分别沿输电线路且远离重点巡检区域2的方向延伸第二预设距离所形成的区域。
52.巡检无人机进入无人机机巢后,将视频和照片等图像数据再次上传车载控制模块,同步更新到巡检中心服务器。
53.所述规划单元生成巡航起点5、巡航重点及导航路径的具体包括如下步骤:
54.获取两个次级巡检区域1远离重点巡检区域2的一端的一个坐标为检测点位并获取检测点位的坐标信息;
55.根据两个坐标信息及实时定位信息计算得到两个检测点位至巡检车4的距离;
56.比较两个检测点位至巡检车4的距离,距离较小的检测点位对应的一端作为巡航起点5,另一端作为巡航终点6;
57.根据巡航起点5、地图信息及实时定位信息生成引导所述巡检车4到达巡航起点5的导航路径。
58.所述无人机机巢包括电量监测模块,所述无人机机巢为所述巡检无人机充电时所述电量监测模块监测巡检无人机的实时电量并生成电量信息发送至车载控制模块,所述车载控制模块还包括续航分析子模块,所述续航分析子模块预存有第一预设距离及无人机参数,所述无人机参数包括无人机预设飞行速度及电量消耗速率,所述续航分析子模块根据第一预设距离、无人机参数及电量信息计算生成第二预设距离。
59.所述续航分析子模块计算生成第二预设距离具体包括如下步骤:
60.根据第一预设距离、无人机参数计算得到第一预设消耗电量;
61.比较第一预设消耗电量及电量信息,若第一预设消耗电量小于电量信息,则根据
第一预设消耗电量及电量信息计算得到剩余电量,并根据剩余电量及无人机参数计算得到第二预设距离,并向信号发送子模块发送启动信号;
62.若第一预设消耗电量大于等于电量信息,则向信号发送子模块发送充电信号,直至电量信息到达预设基础电量时向信号发送子模块发送启动信号;
63.所述信号发送子模块接收到启动信号后向所述巡检无人机发送巡航控制指令,所述信号发送子模块接收到充电信号向图像存储展示子模块发送提醒信息,所述图像存储展示子模块接收提醒信息并展示提醒操作人员巡检无人机电量不足充电中。
64.所述车载控制模块还包括指令输入子模块,所述指令输入子模块用于供操作人员输入操作指令并根据输入的操作指令生成对应的巡航控制指令至信号发送子模块。巡检无人机自动巡航过程中可重新发指令给无人机下达指令,拍摄更多清晰的照片,也可按原巡航路线巡航。
65.将无人机机巢设置在巡检车4上使巡检无人机和无人机机巢可以根据需要随巡检车4移动,降低了建设固定机巢的成本,在出现突发故障时可以快速针对故障点规划巡检路径,由巡检车4带巡检无人机和无人机机巢至最佳起飞点,提高了故障排除的效率。同时设置在巡检车4上的无人机机巢可以随时为巡检无人机进行充电,可以对任意位置的故障线路进行排插,解决了巡检无人机的续航问题。
66.以上所述的实施方式,并不构成对该技术方案保护范围的限定。任何在上述实施方式的精神和原则之内所作的修改、等同替换和改进等,均应包含在该技术方案的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。