1.本发明涉及环境保护技术领域。更具体地说,本发明涉及一种降低碳排放的污水处理方法。
背景技术:
2.双碳战略倡导绿色、环保、低碳的生活方式。加快降低碳排放步伐,有利于引导绿色技术创新,提高产业和经济的全球竞争力。双碳战略是全行业覆盖的,在电力、石油、石化、钢铁、有色金属、建筑、制造业、航空、交通运输等均有涉及。
3.目前,氮磷已经成为长江流域、近岸海域以及不少湖泊的首要污染物,城乡面源污染正在上升为制约我国水生态环境持续改善的主要矛盾之一,因此,污水需要经过处理后才能排放,污水在进行脱氮除磷处理过程中会生成二氧化碳,二氧化碳往往被放空处理,不符合双碳战略。
4.目前的污水处理工程,其实质是一种污染转移工程,它是将污水中的有机污染物一部分转化为co2,直接排放到空气中;一部分转化为污泥,进行填埋。co2是最早被确定为具有温室效应的气体,是全球排放数量最大、温室总效应最强、世界各国都在限制排放的气体。但是,在污水处理领域,co2的产生和排放却听之任之。
技术实现要素:
5.本发明的目的是提供一种降低碳排放的污水处理方法,实现减少温室气体排放的问题。
6.本发明解决此技术问题所采用的技术方案是:一种降低碳排放的污水处理方法,包括以下步骤:
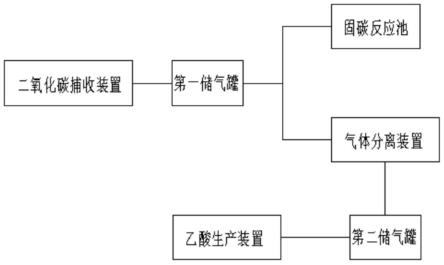
7.步骤s1、通过二氧化碳捕收装置收集污水中的二氧化碳气体,并通入第一储气罐进行存储;
8.步骤s2、第一储气罐上连接有总出气管路,总出气管路分别与第一管路和第二管路连接,所述第一管路和第二管路上均设置有电动阀,所述第一管路与固碳反应池连接,所述第二管路与气体分离装置连接;
9.第一储气罐中的气体通过第一管路进入固碳反应池,作为微生物固碳反应的碳源,生成微生物固体;第一储气罐中的气体通过第二管路进入气体分离装置,将二氧化碳和其他气体进行分离,实现二氧化碳的提纯;
10.步骤s3、气体分离装置的二氧化碳排放管路与第二储气罐连接,所述第二储气罐通过第三管路与乙酸生产装置连接,生成乙酸。
11.优选的是,所述二氧化碳捕收装置包括:
12.筒体,其内部设置有液位计,其通过污水连接管道与污水池连接,所述污水连接管道上设置有电动阀,所述污水连接管道与喷头管道连接,所述喷头管道上设置有多个喷头,所述喷头管道穿入所述筒体内位于筒体上方,污水回流管道与所述污水连接管道连接,所
述污水回流管道的另一端与所述筒体的下部连通,所述污水回流管道上设置有水泵和电动阀,所述筒体上部设置有出气管道,所述出气管道与所述第一储气罐连接,所述筒体的下部设置有污水回收管道;
13.气液分散装置,其包括多个弹片、支撑底板和弹片拨动机构,支撑底板水平固定于所述筒体内的中下部,多个弹片沿长度方向间隔垂直固定于支撑底板上,所述弹片为上窄下宽的薄片结构,所述弹片中部的一侧固定有u型卡扣,所述u型卡扣凸出于所述弹片边侧;所述弹片拨动机构包括水平电动伸缩杆、底板、竖直电动伸缩杆、顶板和多个卡勾,所述卡勾的数量与所述弹片数量相同,所述水平电动伸缩杆固定于筒体一侧,水平电动伸缩杆带动底板沿筒体长度方向运动,所述底板上沿长度方向间隔固定有多个卡勾,所述卡勾的顶端具有一向下倾斜设置的钩体;
14.控制器,其与所有电动阀、水泵、水平电动伸缩杆、竖直电动伸缩杆、液位计连接。
15.优选的是,所述二氧化碳捕收装置还包括复位装置,其包括:电动滑轨、第一电动伸缩杆、连杆和多个l形挡板;
16.电动滑轨水平设置于筒体内,所述第一电动伸缩杆可滑动的设置于电动滑轨上,所述第一电动伸缩杆驱动水平设置的连杆上下移动,所述连杆的下端间隔固定有多个l形挡板,相邻l形挡板间距等于相邻弹片的间距。
17.优选的是,所述二氧化碳捕收装置的控制方法为:
18.步骤s11、控制器控制第一电动伸缩杆收起,使l形挡板与弹片不相互干涉,底板初始位置固定,控制器控制水平电动伸缩杆带动底板朝向远离对应弹片u型卡扣方向运动设定距离l
a1
,之后控制竖直电动伸缩杆上升设定距离l
b1
,之后控制器控制水平电动伸缩杆带动底板朝向靠近对应弹片u型卡扣方向运动设定距离l
a2
、竖直电动伸缩杆下降设定距离l
b2
,使卡勾一一对应的卡入对应u型卡扣中;
19.步骤s12、控制器控制水平伸缩杆带动卡勾朝背离弹片的方向以速度va运动时间t1,同时控制竖直伸缩杆带动卡勾向下以vb运动时间t1,以保证卡勾带动弹片翻转
20.步骤s13、控制竖直伸缩杆停止伸缩、开启污水连接管的电动阀和水泵,控制水平伸缩杆带动卡勾朝背离弹片的方向以速度va运动时间t2,使弹片脱钩;
21.步骤s14、控制竖直电动伸缩杆和水平电动伸缩杆,使底板回位至步骤s11中的初始位;
22.步骤s15、当液位计检测筒体内液位达到设定液位后,所述控制器控制污水连接管的水泵和电动阀关闭;
23.步骤s16、此时l型挡板为初始位置,控制电动滑轨开启,使第一电动伸缩杆朝向远离u型卡扣的长度方向运动设定距离l
c1
,之后控制第一电动伸缩杆向下伸出设定距离l
d1
,控制第一电动伸缩杆朝向靠近u型卡扣的长度方向运动设定距离l
c1
,使弹片为竖直状态时,所述弹片与所述l形挡板能贴合;之后控制l型挡板回到初始位置;
24.步骤s17、重复步骤s11和s12;
25.步骤s18、控制竖直伸缩杆停止伸缩、开启污水回流管的电动阀和水泵,控制水平伸缩杆带动卡勾朝背离弹片的方向以速度va运动时间t2,使弹片脱钩;控制竖直电动伸缩杆和水平电动伸缩杆,使底板回位至步骤s11中的初始位;当污水回流管的电动阀和水泵开启时间达到设定时间t3后,控制污水回流管的水泵和电动阀关闭;之后重复步骤s16;
26.步骤s19、重复步骤s11~步骤s18,完成所有污水的二氧化碳回收。
27.本发明至少包括以下有益效果:能收集污水中的二氧化碳将其转化为微生物固体以及作为生产乙酸的原料。其中,二氧化碳捕收装置利用弹片和污水的撞击,实现二氧化碳从污水中快速分离。
28.本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
29.图1是本发明污水处理流程图;
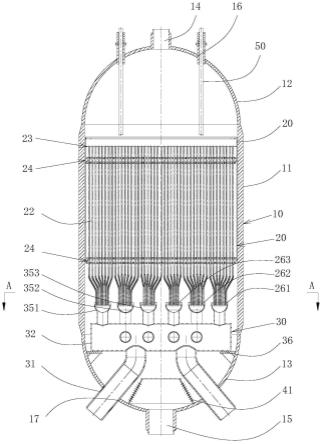
30.图2是本发明二氧化碳捕收装置的结构示意图;
31.图3是图2中a处局部放大图。
32.附图标记说明:1筒体,2污水连接管道,3电动阀,4喷头管道,5污水回流管道,6水泵,7出气管道,8污水回收管道,9气液分散装置,10电动滑轨,11第一电动伸缩杆, 12连杆,13l形挡板,14弹片,15支撑底板,16u型卡扣,17水平电动伸缩杆,18底板,19竖直电动伸缩杆,20顶板,21卡勾,22钩体。
具体实施方式
33.下面结合附图对本发明进行详细、完整的说明。本领域普通技术人员在基于这些说明的情况下将能够实现本发明。在结合附图对本发明进行说明前,需要特别指出的是:本发明中在包括下述说明在内的各部分中所提供的技术方案和技术特征,在不冲突的情况下,这些技术方案和技术特征可以相互组合。
34.此外,下述说明中涉及到的本发明的实施例通常仅是本发明一部分的实施例,而不是全部的实施例。因此,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
35.以下结合附图及实施对本发明作进一步的详细说明,其具体实施过程如下:
36.如图1~3所示,本发明提供一种降低碳排放的污水处理方法,包括以下步骤:
37.步骤s1、通过二氧化碳捕收装置收集污水中的二氧化碳气体,并通入第一储气罐进行存储;
38.步骤s2、第一储气罐上连接有总出气管路,总出气管路分别与第一管路和第二管路连接,所述第一管路和第二管路上均设置有电动阀3,所述第一管路与固碳反应池连接,所述第二管路与气体分离装置连接;
39.第一储气罐中的气体通过第一管路进入固碳反应池,作为微生物固碳反应的碳源,生成微生物固体;第一储气罐中的气体通过第二管路进入气体分离装置,将二氧化碳和其他气体进行分离,实现二氧化碳的提纯,利用不同气体在压力一定条件下液化温度不同完成二氧化碳和其他气体的分离;
40.步骤s3、气体分离装置的二氧化碳排放管路与第二储气罐连接,所述第二储气罐通过第三管路与乙酸生产装置连接,生成乙酸。
41.本技术方案还可以包括以下技术细节,以更好地实现技术效果:所述二氧化碳捕收装置包括:
42.筒体1,其内部设置有液位计,其通过污水连接管道2与污水池连接,所述污水连接管道2上设置有电动阀3,所述污水连接管道2与喷头管道4连接,所述喷头管道4上设置有多个喷头,所述喷头管道4穿入所述筒体1内位于筒体1上方,污水回流管道5与所述污水连接管道2连接,所述污水回流管道5的另一端与所述筒体1的下部连通,所述污水回流管道5上设置有水泵6和电动阀3,所述筒体1上部设置有出气管道7,所述出气管道7与所述第一储气罐连接,所述筒体1的下部设置有污水回收管道8;
43.气液分散装置9,其包括多个弹片14、支撑底板1815和弹片14拨动机构,支撑底板 1815水平固定于所述筒体1内的中下部,多个弹片14沿长度方向间隔垂直固定于支撑底板1815上,所述弹片14为上窄下宽的薄片结构,具有一定的弯折变形能力,所述弹片 14中部的一侧固定有u型卡扣16,所述u型卡扣16凸出于所述弹片14边侧;所述弹片 14拨动机构包括水平电动伸缩杆17、底板18、竖直电动伸缩杆19、顶板20和多个卡勾 21,所述卡勾21的数量与所述弹片14数量相同,所述水平电动伸缩杆17固定于筒体1 一侧,水平电动伸缩杆17带动底板18沿筒体1长度方向运动,所述底板18上沿长度方向间隔固定有多个卡勾21,所述卡勾21的顶端具有一向下倾斜设置的钩体22,多个卡勾 21设置为可同步通过钩体22对应穿入对应弹片14的卡扣中;
44.控制器,其与所有电动阀3、水泵6、水平电动伸缩杆17、竖直电动伸缩杆19、液位计连接。
45.本技术方案还可以包括以下技术细节,以更好地实现技术效果:所述二氧化碳捕收装置还包括复位装置,其包括:电动滑轨10、第一电动伸缩杆11、连杆12和多个l形挡板 13;
46.电动滑轨10水平设置于筒体1内,优选的是所述电动滑轨10位于喷头的上方,所述第一电动伸缩杆11可滑动的设置于电动滑轨10上,所述第一电动伸缩杆11驱动水平设置的连杆12上下移动,所述连杆12的下端间隔固定有多个l形挡板13,相邻l形挡板 13间距等于相邻弹片14的间距。
47.本技术方案还可以包括以下技术细节,以更好地实现技术效果:所述二氧化碳捕收装置的控制方法为:
48.步骤s11、控制器控制第一电动伸缩杆11收起,使l形挡板13与弹片14不相互干涉,底板18初始位置固定,控制器控制水平电动伸缩杆17带动底板18朝向远离对应弹片14u型卡扣16方向运动设定距离l
a1
,之后控制竖直电动伸缩杆19上升设定距离l
b1
,之后控制器控制水平电动伸缩杆17带动底板18朝向靠近对应弹片14u型卡扣16方向运动设定距离l
a2
、竖直电动伸缩杆19下降设定距离l
b2
,使卡勾21一一对应的卡入对应u 型卡扣16中;
49.步骤s12、控制器控制水平伸缩杆带动卡勾21朝背离弹片14的方向以速度va运动时间t1,同时控制竖直伸缩杆带动卡勾21向下以vb运动时间t1,以保证卡勾21带动弹片 14翻转
50.步骤s13、控制竖直伸缩杆停止伸缩、开启污水连接管的电动阀3和水泵6,控制水平伸缩杆带动卡勾21朝背离弹片14的方向以速度va运动时间t2,使弹片14脱钩;
51.步骤s14、控制竖直电动伸缩杆19和水平电动伸缩杆17,使底板18回位至步骤s11 中的初始位;
52.步骤s15、当液位计检测筒体1内液位达到设定液位后,所述控制器控制污水连接
管的水泵6和电动阀3关闭;
53.步骤s16、此时l型挡板为初始位置,控制电动滑轨10开启,使第一电动伸缩杆11 朝向远离u型卡扣16的长度方向运动设定距离l
c1
,之后控制第一电动伸缩杆11向下伸出设定距离l
d1
,控制第一电动伸缩杆11朝向靠近u型卡扣16的长度方向运动设定距离 l
c1
,使弹片14为竖直状态时,所述弹片14与所述l形挡板13能贴合,通过l型挡板使弹动弹片14逐渐静止;之后控制l型挡板回到初始位置;
54.步骤s17、重复步骤s11和s12;
55.步骤s18、控制竖直伸缩杆停止伸缩、开启污水回流管的电动阀3和水泵6,控制水平伸缩杆带动卡勾21朝背离弹片14的方向以速度va运动时间t2,使弹片14脱钩;控制竖直电动伸缩杆19和水平电动伸缩杆17,使底板18回位至步骤s11中的初始位;当污水回流管的电动阀3和水泵6开启时间达到设定时间t3后,控制污水回流管的水泵6和电动阀3关闭;之后重复步骤s16;
56.步骤s19、重复步骤s11~步骤s18,完成所有污水的二氧化碳回收。
57.弹片14在弹动过程中污水从喷头喷出,污水向下冲入筒体1中,冲力使弹片14再次翻转,实现弹片14的左右弹动,弹片14和污水的撞击加速了二氧化碳从污水中分离,从而二氧化碳从出气管道7排出,当污水在筒体1中达到设定液位后,污水通过回流管道再次进入筒体1进行气液分离,之后污水通过污水回收管道8进入第一储气罐。
58.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的实施例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。