1.本发明涉及车床领域,特别涉及一种车床伺服动力刀塔控制方式。
背景技术:
2.随着数控机床正向更高的转速、更多的轴向以及更加复合等方向稳速发展,刀塔作为数控车床运作相对较为重要的一部分,要使得其能够满足如今的使用需求,满足更加复杂的加工内容、更高精度的工艺需求以及更稳更快的加工效率,对传统的刀塔提出了更加严苛的要求。
3.目前市面上现有一般刀塔的内部需要大量传感器以及plc内部逻辑相配合,如io伺服刀塔、液压刀塔等,其中io刀塔配线复杂容易造成人为失误,大部分信号通过io点进行控制,出现异常时,往往没有办法第一时间发现问题,从而容易造成刀塔的结构损坏或者是撞刀等情况;此外,液压刀塔其动作由压力大小决定,不仅无法准确控制换刀的速度,而且无法实时监测刀塔负载,进而无法监测各个刀具的使用状态,不方便对刀具进行管理。
4.还有,一般刀塔与系统整合度不往往够高,也造成刀塔调试困难的情况,无法简单便捷的完成刀塔使用调试流程,计算相对合适的负载、共振、以及各积分常数等功能。甚至部分传统刀塔只能安装车刀或镗刀,进行基本的车削加工。
技术实现要素:
5.为解决上述问题,本发明提供了一种车床伺服动力刀塔控制方式。
6.根据本发明的一个方面,提供了一种车床伺服动力刀塔控制方式,包括在刀塔的箱体内部安装两个内藏式的伺服电机,并且由控制单元连接驱动器控制各伺服电机,其包括以下步骤:
7.1)在控制单元的刀塔页上设定参数,并添加换刀流程;
8.2)对刀塔电机进行调试;
9.3)控制单元输出对应旋转命令,刀塔旋转到对应角度的刀位上。
10.本发明中的一种车床伺服动力刀塔控制方式不仅具有换刀速度更快、效率更高、换刀速度可控的优势,并且简化了机床配线复杂程度,节省了人工,不易故障;并且换刀速度可由控制单元进行加减速规划,不会发生由于人员失误造成的换刀异常,还能实时观察监测刀塔对应负载率和速度,不仅便于管理,也可通过对应负载变化值,及时判断加工刀具状态,比如是否存在磨损严重或是断刀的情况等。
11.在一些实施方式中,在步骤1)中,在刀塔页上设定的参数主要包括命令/状态暂存器、驱动器站号、减速比和总刀数。其有益之处在于,描述了所设定的参数的种类。
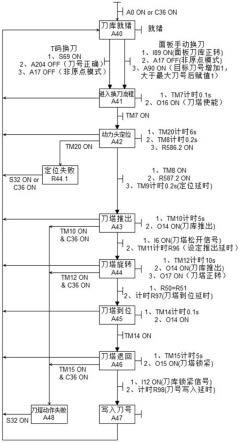
12.在一些实施方式中,在步骤1)中,换刀流程依次为刀库就绪、进入换刀流程、动力头定位、刀塔推出、刀塔旋转、刀塔到位、刀塔退回和写入刀号。其有益之处在于,描述了具体的换刀流程。
13.在一些实施方式中,在步骤2)中,通过在控制单元上的选择一键调试功能对刀塔
电机进行调试。其有益之处在于,描述了对刀塔电机进行调试的具体操作方式。
14.在一些实施方式中,在步骤2)中,对刀塔电机进行调试的内容包括:伺服电机对应共振点进行抓取以及点位的抑制、计算刀塔的最优负载惯量值、计算机床的最佳刚性增益值。其有益之处在于,描述了对刀塔电机进行调试的具体内容。
15.在一些实施方式中,在步骤2)中,调试后的参数会自动写入到驱动参数中。其有益之处在于,无需进行手动编写及修改,从而降低了人为产生的误差和损失
16.在一些实施方式中,在步骤3)中,刀塔的每一个刀位上都对应一个固定的角度。其有益之处在于,可以使刀塔快速且准确的旋转到对应角度的刀位上。
17.在一些实施方式中,还包括以下步骤:
18.4)当发生意外使得刀塔在换刀过程中中断时,在控制单元上完成乱刀排序动作。其有益之处在于,描述了发生意外时的情况和解决方法。
19.在一些实施方式中,在步骤4)中,在非急停状态下完成乱刀排序动作时,将控制单元模式修改为刀塔的手动正转或者反转,或者设定刀塔绝对式原点。其有益之处在于,描述了完成乱刀排序动作的方法。
20.在一些实施方式中,刀塔上具有安装车刀、镗刀和旋转刀具的功能。其有益之处在于,使刀塔的每个刀具位置既可安装车刀,又可安装旋转刀具,可实现车削加工和铣削、钻削、攻丝等加工。
附图说明
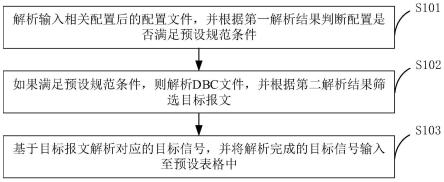
21.图1为本发明一种实施方式的一种车床伺服动力刀塔控制方式的plc换刀流程示意图。
具体实施方式
22.下面结合附图对本发明作进一步详细的说明。
23.现有的刀塔,其电机置于箱体的外面,并且通过同步带把动力传给驱动轴,驱动轴的端部与第一齿轮固定连接在一起,刀盘与第二齿轮固定连接在一起,第一齿轮和第二齿轮相啮合,从而实现电机转动带动刀盘转动的目的。此外,其控制单元通过电机内置的编码器反馈信息进行控制电机的转速、圈数和旋转角度,用于实现刀盘的转位控制。
24.现有刀塔的刀盘的圆周上有多个安装平面和安装槽,用于固定车刀刀座或镗刀刀座,与刀塔的内部结构是完全隔离的。此外,其刀座通过定位键和螺钉固定在刀盘的圆周各刀位上,刀座上可安装车刀或镗刀,但此类刀具只能实现直线进给进行车削加工的要求,且外形尺寸较大。
25.本发明中所使用的车床伺服动力刀塔,其相对于现有的刀塔,做出了以下几点结构上的改变:
26.1.改变了电机的位置,通过在刀塔的箱体内部安装两个内藏式的伺服电机,分别用于控制刀塔的精确转位(即换刀)和刀具高速旋转,该设计中可能涉及到一些机械、电气、气动或液压等相关领域的改进操作,均为现有的成熟技术手段。
27.2.改变了电机的控制方式,通过控制单元(通常是plc)连接驱动器,进而控制各伺服电机。其中,伺服电机可以根据控制单元所命令的位移量旋转到相应的位置,则仅需控制
刀塔推出与电机旋转相配合进行动作,从而大大减少了配线复杂度以及后续维护难度,并且通过设定相关加减速参数,使得控制刀塔以合适且符合客户预期的换刀速度进行换刀动作。
28.此外,在控制单元上具有刀塔页,可以在其上设定相关的加工参数。
29.3.改变了各安装刀具位置的结构,在传统刀塔在功能和结构的基础上,增加了安装车刀、镗刀和旋转刀具(如铣刀、钻头、丝锥等)的功能,使每个刀具位置既可安装车刀,又可安装旋转刀具,可实现车削加工和铣削、钻削、攻丝等加工。
30.在对该车床伺服动力刀塔进行控制时,主要包括下文所述的几个步骤。
31.第一步,在控制单元的刀塔页上设定相关参数,并添加对应plc的换刀流程内容。
32.其中,在刀塔页上设定的参数主要包括:命令/状态暂存器、驱动器站号、减速比和总刀数等。
33.如图1所示,plc的换刀流程依次为刀库就绪、进入换刀流程、动力头定位、刀塔推出、刀塔旋转、刀塔到位、刀塔退回和写入刀号等步骤。
34.第二步,对刀塔电机进行调试。
35.其中,仅需要在控制单元上选择对刀塔电机进行一键调试功能,即可实现以下调试内容和效果:
36.1.自动对伺服电机共振点进行抓取以及点位的抑制,从而可以避免刀塔旋转可能造成的震动以及声音过大的问题,提高加工稳定性以及加工效率;
37.2.在转子惯量估测无误情况下,自动计算刀塔的最优负载惯量值,从而使得刀塔在旋转过程中能更好的规划调刀命令,提高整个系统的稳定性和响应性;
38.3.自动计算出最合适电机、刀塔乃至机床整体的最佳刚性增益值,其中包括速度、位置回路的相关增益,以及速度回路的积分时间,从而使刀塔能够进行更好的速度规划,避免速度规划异常造成的比如加速度过快造成的旋转速度异常问题,加快整个刀塔的换刀动作;
39.4.以上调试内容结束后,调试后的参数会自动写入到对应的驱动参数中,从而无需进行手动编写及修改,降低了人为产生的误差和损失。
40.第三步,由控制单元输出对应旋转命令,完成推出动作以后,再由刀塔快速且准确的旋转到对应角度的刀位上。其中,刀塔的每一个刀位上都对应一个固定的角度。
41.此外,无需使用额外的数刀信号计算当前对应刀号,并且可以由控制单元自行设定对应换刀时刀塔的旋转速度。
42.最后,当发生意外使得刀塔在换刀过程中中断时,可以在控制单元上进行操作完成对应乱刀排序动作。
43.其中,在非急停状态下,将控制单元模式修改为刀塔的手动正转或者反转即可完成乱刀排序动作,也可以通过设定刀塔绝对式原点的方式解决问题。
44.以上所述仅是本发明的一些实施方式。对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。