技术特征:
1.一种卫星轨道转移策略确定方法,其特征在于,包括:根据卫星的参数信息、所述卫星对应的目标轨道的参数信息、和所述卫星从当前位置飞行至所述目标轨道的第一参考时间,确定所述卫星对应的升轨轨迹、降轨轨迹、所述升轨轨迹对应的第一无推力轨迹以及所述降轨轨迹对应的第二无推力轨迹;根据所述升轨轨迹、所述降轨轨迹、所述第一无推力轨迹以及所述第二无推力轨迹,划分至少两个飞行区域,并确定每个飞行区域对应的轨道转移策略;根据所述卫星的当前位置和所述每个飞行区域对应的轨道转移策略,确定所述卫星的目标轨道转移策略。2.根据权利要求1所述的方法,其特征在于,所述根据卫星的参数信息、所述卫星对应的目标轨道的参数信息、和所述卫星从当前位置飞行至所述目标轨道的第一参考时间,确定所述卫星对应的升轨轨迹、降轨轨迹、所述升轨轨迹对应的第一无推力轨迹以及所述降轨轨迹对应的第二无推力轨迹,包括:根据卫星的参数信息、所述卫星对应的目标轨道的参数信息、和所述卫星从当前位置飞行至所述目标轨道的第一参考时间,确定所述卫星对应的卫星相位变化速率、升轨轨迹和降轨轨迹;根据所述卫星相位变化速率、所述卫星无推力飞行至所述升轨轨迹的第二参考时间、和所述升轨轨迹,确定所述升轨轨迹对应的第一无推力轨迹;根据所述卫星相位变化速率、所述卫星无推力飞行至所述降轨轨迹的第三参考时间、和所述降轨轨迹,确定所述降轨轨迹对应的第二无推力轨迹。3.根据权利要求2所述的方法,其特征在于,所述根据卫星的参数信息、所述卫星对应的目标轨道的参数信息、和所述卫星从当前位置飞行至所述目标轨道的第一参考时间,确定所述卫星对应的卫星相位变化速率、升轨轨迹和降轨轨迹,包括:根据卫星的参数信息、所述卫星对应的目标轨道的参数信息、和所述卫星从当前位置飞行至所述目标轨道的第一参考时间,通过第一算法,获得所述卫星对应的升轨轨迹和降轨轨迹、以及通过第二算法,获得卫星相位变化速率。4.根据权利要求3所述的方法,其特征在于,所述根据卫星的参数信息、所述卫星对应的目标轨道的参数信息、和所述卫星从当前位置飞行至所述目标轨道的第一参考时间,通过第一算法,获得所述卫星对应的升轨轨迹和降轨轨迹,包括:根据卫星的推力、所述卫星的质量和所述卫星对应的目标轨道的目标轨道高度,确定所述卫星在有推力飞行状态下,所述卫星当前位置对应的轨道半长轴变化量;根据所述推力、所述质量、所述目标轨道高度、所述卫星从当前位置飞行至所述目标轨道的第一参考时间、和所述轨道半长轴变化量,确定所述卫星在所述第一参考时间内的相位变化量和轨道角速度变化量;根据所述目标轨道高度、所述第一参考时间、所述相位变化量和所述轨道角速度变化量,确定所述卫星对应的升轨轨迹和降轨轨迹;相应地,所述根据所述目标轨道高度、所述第一参考时间、所述相位变化量和所述轨道角速度变化量,确定所述卫星对应的升轨轨迹和降轨轨迹,包括:根据所述第一参考时间和所述相位变化量,确定所述卫星对应的当前位置和所述目标轨道在所述第一参考时间内的参考相位差;
根据所述目标轨道高度、所述第一参考时间、和所述轨道角速度变化量,确定所述卫星在所述第一参考时间内的参考轨道高度;根据所述参考相位差和所述参考轨道高度,确定所述卫星对应的升轨轨迹和降轨轨迹。5.根据权利要求1所述的方法,其特征在于,所述根据所述升轨轨迹、所述降轨轨迹、所述第一无推力轨迹以及所述第二无推力轨迹,划分至少两个飞行区域,并确定每个飞行区域对应的轨道转移策略,包括:将所述升轨轨迹、所述降轨轨迹、所述第一无推力轨迹以及所述第二无推力轨迹作为区域边界,划分至少两个飞行区域;根据预设的飞行区域和轨道转移策略之间的对应关系,确定所述每个飞行区域对应的轨道转移策略。6.根据权利要求1所述的方法,其特征在于,所述根据所述卫星的当前位置和所述每个飞行区域对应的轨道转移策略,确定所述卫星的目标轨道转移策略,包括:根据所述卫星当前位置的轨道高度和所述目标轨道的目标轨道高度、所述当前位置和所述目标轨道之间的当前相位差,从所述至少两个飞行区域中确定所述卫星的目标飞行区域;根据所述目标飞行区域和所述每个飞行区域对应的轨道转移策略,确定所述卫星的目标轨道转移策略。7.根据权利要求6所述的方法,其特征在于,所述根据所述卫星当前位置的轨道高度和所述目标轨道的目标轨道高度、所述当前位置和所述目标轨道之间的当前相位差,从所述至少两个飞行区域中确定所述卫星的目标飞行区域,包括:在确定所述卫星当前位置的轨道高度小于所述目标轨道的目标轨道高度的情况下,根据所述当前位置和所述目标轨道之间的当前相位差、所述升轨轨迹和所述第一无推力轨迹,确定所述卫星的目标飞行区域;在确定所述卫星当前位置的轨道高度大于所述目标轨道高度的情况下,根据所述当前相位差、所述降轨轨迹和所述第二无推力轨迹,确定所述卫星的目标飞行区域;相应地,所述根据所述当前位置和所述目标轨道之间的当前相位差、所述升轨轨迹和所述第一无推力轨迹,确定所述卫星的目标飞行区域,包括:根据所述当前位置的轨道高度、所述升轨轨迹和所述第一无推力轨迹,计算所述升轨轨迹对应的升轨相位差、和所述第一无推力轨迹对应的第一无推力相位差;对所述当前相位差、所述升轨相位差和所述第一无推力相位差进行比较,根据比较结果确定所述卫星的目标飞行区域;相应地,所述根据所述当前相位差、所述降轨轨迹和所述第二无推力轨迹,确定所述卫星的目标飞行区域,包括:根据所述当前位置的轨道高度、所述降轨轨迹和所述第二无推力轨迹,计算所述降轨轨迹对应的降轨相位差、和所述第二无推力轨迹对应的第二无推力相位差;对所述当前相位差、所述降轨相位差和第二无推力相位差进行比较,根据比较结果确定所述卫星的目标飞行区域。8.一种卫星轨道转移策略确定装置,其特征在于,包括:
第一确定模块,被配置为根据卫星的参数信息、所述卫星对应的目标轨道的参数信息、和所述卫星从当前位置飞行至所述目标轨道的第一参考时间,确定所述卫星对应的升轨轨迹、降轨轨迹、所述升轨轨迹对应的第一无推力轨迹以及所述降轨轨迹对应的第二无推力轨迹;划分模块,被配置为根据所述升轨轨迹、所述降轨轨迹、所述第一无推力轨迹以及所述第二无推力轨迹,划分至少两个飞行区域,并确定每个飞行区域对应的轨道转移策略;第二确定模块,被配置为根据所述卫星的当前位置和所述每个飞行区域对应的轨道转移策略,确定所述卫星的目标轨道转移策略。9.一种计算设备,其特征在于,包括:存储器和处理器;所述存储器用于存储计算机可执行指令,所述处理器用于执行所述计算机可执行指令,该计算机可执行指令被处理器执行时实现权利要求1至7任意一项所述方法的步骤。10.一种计算机可读存储介质,其特征在于,其存储有计算机可执行指令,该计算机可执行指令被处理器执行时实现权利要求1至7任意一项所述方法的步骤。
技术总结
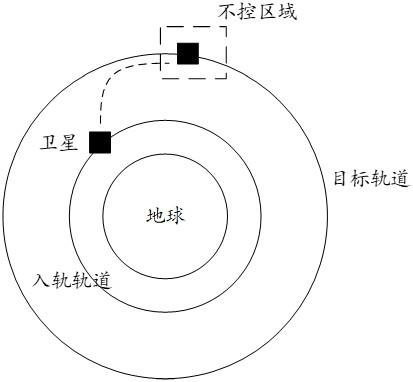
本说明书实施例提供卫星轨道转移策略确定方法以及装置,其中所述卫星轨道转移策略确定方法包括:根据卫星的参数信息、所述卫星对应的目标轨道的参数信息、和所述卫星从当前位置飞行至所述目标轨道的第一参考时间,确定所述卫星对应的升轨轨迹、降轨轨迹、所述升轨轨迹对应的第一无推力轨迹以及所述降轨轨迹对应的第二无推力轨迹;根据所述升轨轨迹、所述降轨轨迹、所述第一无推力轨迹以及所述第二无推力轨迹,划分至少两个飞行区域,并确定每个飞行区域对应的轨道转移策略;根据所述卫星的当前位置和所述每个飞行区域对应的轨道转移策略,确定所述卫星的目标轨道转移策略。实现了卫星自主确定轨道转移策略,提高轨道转移策略的灵活性。略的灵活性。略的灵活性。
技术研发人员:王有松 任家栋 常明 孟少康 刘川 牛童 屈泉酉
受保护的技术使用者:银河航天(北京)通信技术有限公司
技术研发日:2022.12.01
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。