1.本发明属于机器人领域,具体涉及一种基于腱鞘驱动的医用上肢辅助外骨骼。
背景技术:
2.相对于传统外科手术,机器人辅助微创外科手术具有目标定位精确、易于实现微创化、可进行远程手术等优点,为具有微创化和精细化特征的第三代外科手术奠定了技术基础,能够提高手术效率与成功率、减少患者手术痛楚、缩短术后恢复时间等。但是任何一种手术方式的进步都不可避免地带来了手术操作难度的提高,微创化意味着较小的手术切口,这就对医生手部运动的稳定性和精准度提出了不小的挑战。操作手术的过程中,医生手臂的运动精度极限,长时间进行手术之后的疲劳导致的手部颤抖,都会影响手术的最终治疗效果,同时也制约了医学技术的进步。
3.因此,迫切需要一种用于辅助医生进行手术的上肢外骨骼的辅助装置,从而减轻医生长时间进行手术之后的疲劳导致的手部颤抖给手术带来的负面影响。
4.柔性外骨骼和刚性外骨骼机器人设计的工作原理实际都是利用外部的机械力,以驱动外骨骼对应的人体关节运动。
5.传统刚性材料外骨骼尽管尺寸紧凑,但质量大且适应性相对较低。理想情况下,可穿戴外骨骼应该做到重量轻、可靠性高、价格便宜,且需要符合人体工程学,外骨骼关节和人体关节不能有明显的错位。为了追求使用者舒适性,以及穿戴后运动的流畅度,基于柔性材料的上肢外骨骼被广泛应用于上肢康复等应用。
6.柔性材料包括鲍登线、气动肌肉、气囊等。腱鞘机构是一种基于柔性材料的传动机构,通过内部肌腱与外鞘的相对运动实现力和位移的传递,腱鞘驱动机构具有尺寸小、质量轻、机构噪音小、力传递精度高且平滑性好、传动路径灵活多变、适合远距离传递扭矩等优良特点,因此基于腱鞘驱动的外骨骼能够很好地满足上肢辅助外骨骼地各类需求。
7.大量研究人员一直在研究和开发各种类型的可穿戴外骨骼,考虑到外骨骼在具体应用如医疗康复方面的实用性和日益增长的各种类型的需求,该技术在机械设计、控制和人机交互方面仍面临挑战。公开号为cn104097213a的专利公布了一种并联驱动关节的上肢外骨骼,该外骨骼通过齿轮进行传动,其质量大、适应性相对较低、能耗高且制造成本高昂。公开号为cn108500957a的专利公布了一种穿戴式柔性上肢外骨骼,通过无刷电机和电磁离合器来控制外骨骼地运动,其成本高、结构复杂且存在潜在的故障安全问题。
技术实现要素:
8.本发明的目的在于提供一种基于腱鞘驱动的医用上肢辅助外骨骼,该外骨骼可以为医生双手提供支撑,减轻医生的操作时来自手臂自身重力负担。
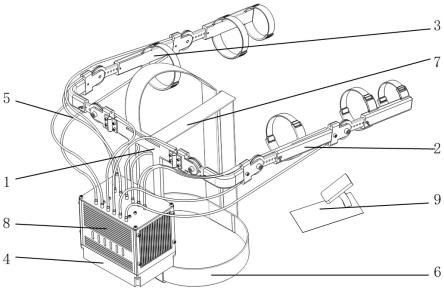
9.为实现上述目的,本发明采用了以下技术方案:一种基于腱鞘驱动的医用上肢辅助外骨骼,包括t形背架板1、左臂总成3、右臂总成2、控制机构和腱鞘系统5;
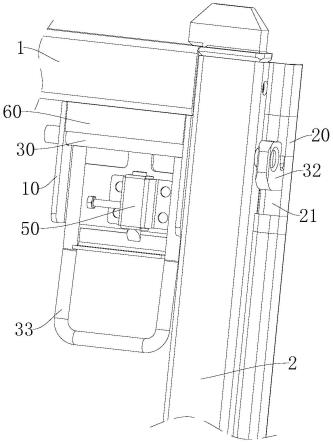
所述左臂总成3和右臂总成2对称布置在t形背架板1前侧面的上端部,形成上肢辅助外骨骼;所述控制机构设于控制箱4内,且控制箱4固定安装在t形背架板1后侧面的下部,并用于控制腱鞘系统5作用于左臂总成3和右臂总成2;所述左臂总成3和右臂总成2的结构相同,且包括小臂21、大臂23和水平布置的l形肩部连杆25,t形背架板1的水平板两端分别连接有合页铰链27;所述小臂21、大臂23、肩部连杆25和合页铰链27通过第一关节机构22、第二关节机构24和第三关节机构26依次连接;所述第一关节机构22、第二关节机构24和第三关节机构26的结构相同,包括转动基座31和转动体32,转动体32包括鼓部321和手柄部322,鼓部321和转动基座31通过轴承机构转动连接,鼓部321的外侧圆周上开设有线槽;所述小臂21包括小臂连接管211,大臂23包括大臂连接管231,小臂连接管211和大臂连接管231的内侧面上设有至少一个可伸缩的绑环,所述第一关节机构22的手柄部322和小臂连接管211对应端连接,第一关节机构22的转动基座31和大臂连接管231对应端连接,大臂连接管231另一端和第二关节机构24的手柄部322连接,第二关节机构24的转动基座31和肩部连杆25对应端连接,肩部连杆25另一端和第三关节机构26的手柄部322连接,第三关节机构26的转动基座31和合页铰链27的一页连接;所述控制机构包括控制器81、蓄电池82和电机模组,控制器81和蓄电池82布置在所述控制箱4的底部,电机模组包括电机驱动器831、电机832、滚珠丝杠螺母副833和滑轨834,电机驱动器831固定安装在电机832的电机壳端部,电机832的电机轴、滚珠丝杠螺母副833的丝杠和滑轨834平行布置,电机轴和丝杠通过带传动机构85同步转动;滚珠丝杠螺母副833的螺母座上端通过滑块835滑动配合设于滑轨834上;所述腱鞘系统5包括水平布置的方形连接板51、6个并排布置的压紧机构、轮轴52和6根柔索53,方形连接板51、轮轴52和6个压紧机构布置在控制箱4内;所述方形连接板51的上端和螺母座的下端固定连接,且方形连接板51的宽度方向和滑轨平行;每个压紧机构包括第一压板541、第二压板542和滑轮543,第一压板541和第二压板542为横向平行布置的直立板,第一压板541和第二压板542相对侧面通过波浪形相互啮合为一对压紧面,滑轮543直立布置在一对压紧面的下方;6个压紧机构的6个第一压板541并排固定在方形连接板51的下底面,且每个第一压板541长度方向和方形连接板51长度方向一致,每个第二压板542的两端固定在控制箱4相对的侧板上,6个滑轮543套装在轮轴52上,轮轴52平行方形连接板51宽度方向布置,柔索、滑轮543、每对压紧面和鼓部321一一对应,使得每根柔索绕过滑轮543下端,柔索的两端向上经过一对压紧面,然后穿出控制箱4的上盖板,最后绕经鼓部321的线槽,并通过线卡固定在线槽上;位于控制箱4和鼓部321之间的每根柔索53外均套装有鲍登线鞘体;工作时,通过绑带将t形背架板1固定在人体背部,并通过伸缩绑环将左臂总成3和
右臂总成2穿戴在人体左臂和人体右臂上,脚踏板开关9通过控制控制器81实现对电机832的控制,电机832转动带动方形连接板51移动,使得每对压紧面压紧或松开对应的柔索,实现约束第一关节机构22、第二关节机构24和第三关节机构26的转动自由度,对人体左臂和人体右臂提供有力的支撑。
10.进一步,所述控制机构还包括光电限位机构84,光电限位机构84包括一对槽形光电开关841和u形的遮光片842,一对槽形光电开关841通过倒立的一对l形支板843间隔安装在滑轨834的一侧面,遮光片842通过支板安装在所述螺母座的对应侧面,螺母座移动带动遮光片842移动,使得遮光片842单向移动时,实现遮光片842的一侧板经过同方向的槽形光电开关的槽口。
11.进一步,所述带传动机构85包括第一轴承座851、第二轴承座852、第一带轮853、第二带轮854和惰轮855,第一轴承座851和第二轴承座852对应安装在所述控制箱4内相对两侧,丝杠转动安装在第一轴承座851和第二轴承座852之间,电机832的电机轴转动安装在第一轴承座851上,且电机轴伸出第一轴承座851的一端安装所述第一带轮853,丝杠伸出第一轴承座851的一端安装所述第二带轮854,且第一带轮853和第二带轮854通过同步带传动,所述惰轮855安装在同步带下端的外侧对应的第一轴承座851上,用于张紧同步带。
12.进一步,所述小臂连接管211、大臂连接管231和肩部连杆25均为矩形钢管;每根手柄部322均为矩形杆;所述小臂连接管211和第一关节机构22的手柄部322插接并通过螺纹固定形成伸缩杆,第一关节机构22的转动基座31和大臂连接管231对应端固定连接,大臂连接管231另一端部和第二关节机构24的手柄部322插接并通过螺纹固定形成伸缩杆,第二关节机构24的转动基座31和肩部连杆25对应端固定连接,肩部连杆25的另一端部和第三关节机构26的手柄部322插接并通过螺纹固定形成伸缩杆,第三关节机构26的转动基座31和合页铰链27的另一页固定连接。
13.进一步,所述小臂连接管211的内侧面上设有腕伸缩绑环212和肘伸缩绑环213,大臂连接管231的内侧面上设有大臂伸缩绑环232,且腕伸缩绑环212、肘伸缩绑环213和大臂伸缩绑环232的结构相同,包括上托架、下托架和伸缩绑带,上托架和下托架为同圆弧上的不同弧段,且上托架的下端和对应的矩形钢管的上端固定连接,下托架的上端和对应的矩形钢管的下端固定连接,上托架和下托架的悬伸端上对应开设有一对矩形孔,伸缩绑带的两端固定在对应一对矩形孔上。
14.进一步,每个所述转动基座31包括直立的一对安装板311和直立的固定块312,一对安装板311的一端固定在固定块312的一侧面上;第一关节机构22的安装块312的另一侧面上开设有插槽,插槽内固定插接所述大臂连接管231的对应端,第二关节机构24的安装块312的另一侧面上开设有插槽,插槽内固定插接所述肩部连杆25的对应端,第三关节机构26的安装块312和合页铰链27的一页固定连接;每个所述轴承机构包括轴承331、一对垫片332和螺栓333;每个所述转动体32的鼓部321中间开设有安装孔,鼓部321位于一对安装板311之间,使得轴承331配合位于安装孔内,一对垫片332设于轴承331的两端,螺栓333穿过一对安装板311将鼓部321转动安装。
15.进一步,每个所述安装块312的上、下端对开设有一对线孔,每个鼓部321和手柄部322连接处的中部开设有方孔,柔索53的两端分别穿过一对线孔,绕经对应鼓部321的线槽内,并分别通过线卡卡接于对应方孔内。
16.进一步,所述6根柔索分别为第一柔索531、第二柔索532、第三柔索533、第四柔索534、第五柔索535和第六柔索536;第一柔索531、第二柔索532、第三柔索533、第四柔索534、第五柔索535和第六柔索536在控制箱内依次并列布置,使得第一柔索531的两端、第二柔索532的两端、第三柔索533的两端、第四柔索534的两端、第五柔索535的两端和第六柔索536的两端从控制箱4的上盖板从右至左依次穿出,实现第一柔索531、第二柔索532、第三柔索533依次绕经右臂总成的第一关节机构22的鼓部321、第二关节机构24的鼓部321和第三关节机构26的鼓部321;第四柔索534的两端、第五柔索535的两端和第六柔索536依次绕经左臂总成的第一关节机构22的鼓部321、第二关节机构24的鼓部321和第三关节机构26的鼓部321。
17.进一步,所述控制箱4的底部为一体成型且带矩形凹槽的箱底,控制箱4的侧板分别均匀开设有散热条孔,所述轮轴52平行于控制箱4的长度方向安装在箱底的上端,且轮轴52一端对应的控制箱4侧板上设有轴承盖,防止轮轴52发生轴向窜动。
18.进一步,所述t形背架板1的竖直部为一对竖板,且一对竖板下端固定设有腰部绑带6,一对竖板上端设有一对肩绑带7。
19.本发明的有益技术效果如下:本发明的一种基于腱鞘驱动的医用上肢辅助外骨骼,左臂总成和右臂总成对称布置在t形背架板前侧面的上端部,形成上肢辅助外骨骼;左臂总成或右臂总成结构相同,且包括小臂、大臂和水平布置的l形肩部连杆,t形背架板的水平板两端分别连接有合页铰链;t形背架板的水平板两端分别连接着合页铰链的一页;小臂、大臂、肩部连杆和合页铰链通过第一关节机构、第二关节机构和第三关节机构依次连接;第一关节机构、第二关节机构和第三关节机构的结构相同,包括转动基座和转动体,转动体包括鼓部和手柄部,鼓部和转动基座通过轴承机构转动连接,第三关节机构的转动基座和合页铰链的一页连接;如上所述左臂总成或右臂总成具有第一关节机构、第二关节机构和第三关节机构形成的三个上下旋转的自由度,和由合页铰链形成的一个向身体内外侧旋转的自由度;控制机构用于控制腱鞘系统作用于上肢辅助外骨骼,即脚踏板开关通过控制控制器实现对电机的控制,电机转动带动方形连接板移动,使得每对压紧面压紧或松开对应的柔索,实现约束第一关节机构、第二关节机构和第三关节机构的转动自由度,以对医生的手臂提供有力的支撑;如上所述通过腱鞘系统的柔索驱动的方式实现长距传动,能够实现控制机构对第一关节机构、第二关节机构和第三关节机构的控制,同时即脚踏板开关通过控制控制器实现对电机的控制为无线控制方式,即控制器发送信号实现对上肢辅助外骨骼的控制;因此本发明的一种基于腱鞘驱动的医用上肢辅助外骨骼,左臂总成和右臂总成可实现双臂8个自由,在人体右臂或左臂运动时,左臂总成或右臂总成可以实现跟随运动,不会对人体的运动造成阻碍,人体肩部内外旋动作通过合页铰链被动调节实现,合页铰链的轴线与重力方向平行,不必对其进行约束;
腱鞘系统实现长距离传动,控制机构实现无线控制方式即通过信号对腱鞘系统的控制,进而控制驱动上肢辅助外骨骼,来对医生的手臂提供有力的支撑,减少因手臂疲劳而颤抖给手术带来的额外风险,减轻来自医生手臂自身重力的负担提高手术精度;也可应用于其他需要为手臂提供支持的一些场合。
附图说明
20.图1为本发明的一种基于腱鞘驱动的医用上肢辅助外骨骼的结构示意图。
21.图2为本发明的控制箱的结构示意图。
22.图3为本发明的左臂总成、右臂总成和t形背架板的连接安装图。
23.图4为本发明的左臂总成或右臂总成的结构示意图。
24.图5为图4的另一侧视图。
25.图6为本发明的小臂的结构示意图。
26.图7为本发明的大臂的结构示意图。
27.图8为本发明的第一关节机构或第二关节机构或第三关节机构的结构示意图。
28.图9为图8的主视图。
29.图10为本发明的控制机构和腱鞘系统的布置安装图。
30.图11为图10的局部爆炸图。
31.图12为本发明的控制机构的结构示意图。
32.图13为图12的另一侧视图。
33.图14为本发明的光电限位机构的安装使用图。
34.图15为本发明腱鞘系统的作用原理图。
35.图16为本发明的使用状态图。
36.其中:t形背架板1、右臂总成2、小臂21、第一关节机构22、大臂23、第二关节机构24、肩部连杆25、第三关节机构26、合页铰链27、小臂连接管211、腕伸缩绑环212、肘伸缩绑环213、大臂连接管231、大臂伸缩绑环232、左臂总成3、转动基座31、一对安装板311、固定块312、转动体32、鼓部321、手柄部322、轴承331、一对垫片332、螺栓333、控制箱4、腱鞘系统5、方形连接板51、轮轴52、第一柔索531、第二柔索532、第三柔索533、第四柔索534、第五柔索535、第六柔索536、鲍登线鞘体537、第一压板541、第二压板542、滑轮543、腰部绑带6、一对肩绑带7、控制器81、蓄电池82、电机驱动器831、电机832、滚珠丝杠螺母副833、滑轨834、滑块835、光电限位机构84、一对槽形光电开关841、遮光片842、一对l形支板843、带轮机构85、第一轴承座851、第二轴承座852、第一带轮853、第二带轮854、惰轮855、脚踏板开关9。
具体实施方式
37.为使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明作进一步详细说明。应当理解,此处所描述的具体实施方式仅仅用以解释本发明,并不用于限定本发明。
实施例
38.见图1,一种基于腱鞘驱动的医用上肢辅助外骨骼,包括t形背架板1、左臂总成3、
右臂总成2、控制机构和腱鞘系统5;所述t形背架板1的竖直部为一对竖板,且一对竖板下端固定设有腰部绑带6,一对竖板上端设有一对肩绑带7。
39.所述左臂总成3和右臂总成2对称布置在t形背架板1前侧面的上端部,形成上肢辅助外骨骼。
40.见图2,所述控制机构设于控制箱4内,且控制箱4固定安装在t形背架板1后侧面的下部,并用于控制腱鞘系统5作用于左臂总成3和右臂总成2;所述控制箱4的底部为一体成型且带矩形凹槽的箱底,控制箱4的侧板分别均匀开设有散热条孔,所述轮轴52平行于控制箱4的长度方向安装在箱底的上端,且轮轴52一端对应的控制箱4侧板上设有轴承盖,防止轮轴52发生轴向窜动。
41.见图3~图7,所述左臂总成3和右臂总成2的结构相同,且包括小臂21、大臂23和水平布置的l形肩部连杆25,t形背架板1的水平板两端分别连接有合页铰链27;所述小臂21、大臂23、肩部连杆25和合页铰链27通过第一关节机构22、第二关节机构24和第三关节机构26依次连接;所述第一关节机构22、第二关节机构24和第三关节机构26的结构相同,包括转动基座31和转动体32,转动体32包括鼓部321和手柄部322,鼓部321和转动基座31通过轴承机构转动连接,鼓部321的外侧圆周上开设有线槽;所述小臂21包括小臂连接管211,大臂23包括大臂连接管231,小臂连接管211和大臂连接管231的内侧面上设有至少一个可伸缩的绑环,所述小臂连接管211、大臂连接管231和肩部连杆25均为矩形钢管;每根手柄部322均为矩形杆;所述小臂连接管211和第一关节机构22的手柄部322插接并通过螺纹固定形成伸缩杆,第一关节机构22的转动基座31和大臂连接管231对应端固定连接,大臂连接管231另一端部和第二关节机构24的手柄部322插接并通过螺纹固定形成伸缩杆,伸缩杆的伸缩功能可以改变小臂连接管211或大臂连接管231接入部分的长度,以适应不同升高体重的穿戴者。
42.第二关节机构24的转动基座31和肩部连杆25对应端固定连接,肩部连杆25的另一端部和第三关节机构26的手柄部322插接并通过螺纹固定形成伸缩杆,第三关节机构26的转动基座31和合页铰链27的另一页固定连接。
43.所述小臂连接管211的内侧面上设有腕伸缩绑环212和肘伸缩绑环213,大臂连接管231的内侧面上设有大臂伸缩绑环232,且腕伸缩绑环212、肘伸缩绑环213和大臂伸缩绑环232的结构相同,包括上托架、下托架和伸缩绑带,上托架和下托架为同圆弧上的不同弧段,且上托架的下端和对应的矩形钢管的上端固定连接,下托架的上端和对应的矩形钢管的下端固定连接,上托架和下托架的悬伸端上对应开设有一对矩形孔,伸缩绑带的两端固定在对应一对矩形孔上。
44.见图8和图9,所述第一关节机构22的手柄部322和小臂连接管211对应端连接,第一关节机构22的转动基座31和大臂连接管231对应端连接,大臂连接管231另一端和第二关节机构24的手柄部322连接,第二关节机构24的转动基座31和肩部连杆25对应端连接,肩部连杆25另一端和第三关节机构26的手柄部322连接,第三关节机构26的转动基座31和合页铰链27的一页连接;
每个所述转动基座31包括直立的一对安装板311和直立的固定块312,一对安装板311的一端固定在固定块312的一侧面上;第一关节机构22的安装块312的另一侧面上开设有插槽,插槽内固定插接所述大臂连接管231的对应端,第二关节机构24的安装块312的另一侧面上开设有插槽,插槽内固定插接所述肩部连杆25的对应端,第三关节机构26的安装块312和合页铰链27的一页固定连接;每个所述轴承机构包括轴承331、一对垫片332和螺栓333;每个所述转动体32的鼓部321中间开设有安装孔,鼓部321位于一对安装板311之间,使得轴承331配合位于安装孔内,一对垫片332设于轴承331的两端,螺栓333穿过一对安装板311将鼓部321转动安装。
45.每个所述安装块312的上、下端对开设有一对线孔,每个鼓部321和手柄部322连接处的中部开设有方孔,柔索53的两端分别穿过一对线孔,绕经对应鼓部321的线槽内,并分别通过线卡卡接于对应方孔内。
46.如上所述左臂总成3或右臂总成2具有第一关节机构22、第二关节机构24和第三关节机构26形成的三个上下旋转的自由度,和由合页铰链27形成的一个向身体内外侧旋转的自由度;因此在人体右臂或左臂运动时,左臂总成3或右臂总成2可以实现跟随运动,不会对人体的运动造成阻碍,人体肩部内外旋动作通过合页铰链27被动调节,合页铰链27的轴线与重力方向平行,因此不必对其进行约束。
47.见图10和图11,所述控制机构包括控制器81、蓄电池82和电机模组,控制器81和蓄电池82布置在所述控制箱4的底部,电机模组包括电机驱动器831、电机832、滚珠丝杠螺母副833和滑轨834,电机驱动器831固定安装在电机832的电机壳端部,电机832的电机轴、滚珠丝杠螺母副833的丝杠和滑轨834平行布置,电机轴和丝杠通过带传动机构85同步转动;滚珠丝杠螺母副833的螺母座上端通过滑块835滑动配合设于滑轨834上;见图15,所述腱鞘系统5包括水平布置的方形连接板51、6个并排布置的压紧机构、轮轴52和6根柔索53,方形连接板51、轮轴52和6个压紧机构布置在控制箱4内;所述方形连接板51的上端和螺母座的下端固定连接,且方形连接板51的宽度方向和滑轨平行;每个压紧机构包括第一压板541、第二压板542和滑轮543,第一压板541和第二压板542为横向平行布置的直立板,第一压板541和第二压板542相对侧面通过波浪形相互啮合为一对压紧面,压紧面即曲面由8段连续相切的圆弧组成,每段圆弧对应的圆心角为75
˚
;滑轮543直立布置在一对压紧面的下方。
48.6个压紧机构的6个第一压板541并排固定在方形连接板51的下底面,且每个第一压板541长度方向和方形连接板51长度方向一致,每个第二压板542的两端固定在控制箱4相对的侧板上,6个滑轮543套装在轮轴52上,轮轴52平行方形连接板51宽度方向布置,柔索、滑轮543、每对压紧面和鼓部321一一对应,使得每根柔索绕过滑轮543下端,柔索的两端向上经过一对压紧面,然后穿出控制箱4的上盖板,最后绕经鼓部321的线槽,并通过线卡固定在线槽上;位于控制箱4和鼓部321之间的每根柔索53外均套装有鲍登线鞘体;鲍登线鞘体头
部和鲍登线鞘体尾部由金属材料制成,攻有外螺纹,可以和内螺纹配合安装。
49.见图12~图14,所述控制机构还包括光电限位机构84,光电限位机构84包括一对槽形光电开关841和u形的遮光片842,一对槽形光电开关841通过倒立的一对l形支板843间隔安装在滑轨834的一侧面,遮光片842通过支板安装在所述螺母座的对应侧面,螺母座移动带动遮光片842移动,使得遮光片842单向移动时,实现遮光片842的一侧板经过同方向的槽形光电开关的槽口。
50.所述带传动机构85包括第一轴承座851、第二轴承座852、第一带轮853、第二带轮854和惰轮855,第一轴承座851和第二轴承座852对应安装在所述控制箱4内相对两侧,丝杠转动安装在第一轴承座851和第二轴承座852之间,电机832的电机轴转动安装在第一轴承座851上,且电机轴伸出第一轴承座851的一端安装所述第一带轮853,丝杠伸出第一轴承座851的一端安装所述第二带轮854,且第一带轮853和第二带轮854通过同步带传动,所述惰轮855安装在同步带下端的外侧对应的第一轴承座851上,用于张紧同步带。
51.所述6根柔索分别为第一柔索531、第二柔索532、第三柔索533、第四柔索534、第五柔索535和第六柔索536;第一柔索531、第二柔索532、第三柔索533、第四柔索534、第五柔索535和第六柔索536在控制箱内依次并列布置,使得第一柔索531的两端、第二柔索532的两端、第三柔索533的两端、第四柔索534的两端、第五柔索535的两端和第六柔索536的两端从控制箱4的上盖板从右至左依次穿出,实现第一柔索531、第二柔索532、第三柔索533依次绕经右臂总成的第一关节机构22的鼓部321、第二关节机构24的鼓部321和第三关节机构26的鼓部321;第四柔索534的两端、第五柔索535的两端和第六柔索536依次绕经左臂总成的第一关节机构22的鼓部321、第二关节机构24的鼓部321和第三关节机构26的鼓部321。
52.见图16,在手术准备时,通过绑带将人体外骨骼固定在人体背部,并通过伸缩绑环将左臂总成3和右臂总成2穿戴在人体左臂和人体右臂上,可调节小臂21和大臂23的长度,使其不与人体产生错位,第一柔索531、第二柔索532、第三柔索533、第四柔索534、第五柔索535和第六柔索536未被压紧时,可沿着鲍登鞘体537和滑轮543自由滑动,因此第一关节机构22、第二关节机构24和第三关节机构26可自由转动不受限。当医生调整好手臂的位置时,踩下脚踏板板开关9,脚踏板开关9通过控制控制器81实现对电机832的控制,电机832转动带动方形连接板51移动,使得每对压紧面压紧或松开对应的柔索,实现约束第一关节机构22、第二关节机构24和第三关节机构26的转动自由度,以对医生的手臂提供有力的支撑,减少因手臂疲劳而颤抖给手术带来的额外风险。
53.在执行手术进行过程中,医生可随时通过脚踏板开关9控制电机832运动状态,从而调整手臂的位置。实际使用时,此上肢外骨骼也可应用于其他需要为手臂提供支持的一些场合。
54.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。