1.本发明涉及行走机构性能测试技术领域,具体涉及一种坡道试验台。
背景技术:
2.掘进装备的行走机构用来支撑整个掘进装备的自重,承受工作过程中产生的倾覆力矩及动载荷,尤其在坡度较大的断面,掘进装备受截割力的反力作用,极易引起打滑、侧倾的现象,存在极大的安全隐患,易造成安全事故。随着大型、特大型煤矿的发展和煤矿开采深度的增加,工作面与巷道坡度变化范围越来越大,已出现大坡度掘进工况,国内每年都有数起因掘进机作业发生挤压伤人或其他的安全生产事故。目前国内对掘进装备行走机构行走性能只是在固定角度的坡道进行爬坡能力的检测,无法模拟实际生产中不同角度的坡道的爬坡能力。
技术实现要素:
3.本发明的目的是提供一种坡道试验台,以解决上述现有技术存在的问题,能够改变坡道角度并扩大模拟范围。
4.为实现上述目的,本发明提供了如下方案:
5.本发明提供一种坡道试验台,包括基台、载物台、测功装置和角度调节装置,所述基台与所述角度调节装置连接,所述角度调节装置用于调节并锁定所述基台相对水平面倾斜的角度,所述测功装置包括测功滚筒,所述测功滚筒与所述基台转动连接,所述载物台设置在所述基台上,所述基台用于支撑所述载物台,所述载物台上开设有用于避让所述测功滚筒且被所述测功滚筒穿过的开口,所述载物台滑动设置在所述基台上,所述基台的一端固定设置有制动力传感器,所述基台上还设置有限位装置,所述限位装置用于限制所述载物台向远离所述制动力传感器的方向滑动,所述载物台能够向靠近所述制动力传感器的方向滑动并与所述制动力传感器抵接。
6.优选的,还包括称重传感器,所述称重传感器用于固定设置在所述基台上,所述载物台设置在所述称重传感器上,所述称重传感器用于完全支撑所述载物台。
7.优选的,所述载物台的另一端固定设置有牵引力传感器。
8.优选的,还包括导向轮,所述导向轮与所述基台转动连接,所述导向轮的边缘与所述载物台的侧面抵接并限制所述载物台仅能向远离或者靠近所述制动力传感器的方向滑动。
9.优选的,还包括角度传感器,所述角度传感器固定设置在所述基台上。
10.优选的,还包括多个举升装置,所述举升装置固定设置在所述载物台上,多个所述举升装置绕所述开口边缘排布设置。
11.优选的,所述测功装置还包括测功传感器和固定法兰,所述测功滚筒的轴用于与所述固定法兰的内沿转动连接,所述固定法兰的外沿用于与基台固定连接,所述测功传感器的输入端用于与所述测功滚筒的轴固定连接。
12.优选的,所述测功滚筒的径向侧面固定设置有用于与履带配合的筋条。
13.优选的,所述角度调节装置为伸缩机构,还包括地基,所述基台与所述地基绕第一轴线转动连接,所述液压伸缩杆的一端与地基绕第二轴线转动连接,所述液压伸缩杆的另一端与所述基台绕第三轴线转动连接,所述第一轴线、所述第二轴线与所述第三轴线均相互平行且不共线,所述伸缩机构缩能够调节所述基台相对水平面倾斜的角度并能够锁定所述基台相对水平面倾斜的角度。
14.优选的,所述载物台在靠近所述制动力传感器的一端固定设置有抵接杆,所述抵接杆用于与所述制动力传感器抵接。
15.本发明相对于现有技术取得了以下技术效果:
16.本发明提供的坡道试验台,测试时,首先将掘进装备放置在载物台的远离测功滚筒的一端上,使掘进装备在载物台上行走,在掘进装备开始行走后,此时虽然行走机构对载物台进行施力,但是由于限位装置的作用,载物台不会滑动,行走后开始制动,此时因为掘进装备的惯性,会带动载物台向制动力传感器的方向滑动并与制动力传感器撞击,此时制动力传感器受到的载物台的撞击的推力即为掘进装备的行走机构的制动力。
17.进一步的,载物台设置在基台上,基台用于支撑载物台,使用角度调节装置调节基台相对水平面倾斜的角度,从而能够调节载物台相对水平面倾斜的角度,不断增大载物台相对水平面倾斜的角度,观察掘进设备开始溜车时载物台相对水平面倾斜的角度,即可检测出掘进装备在多大角度的坡度内不会溜车,即掘进设备的爬坡能力。
18.进一步的,将掘进装备移动至测功滚筒上,使掘进装备的行走机构的行走零部件与测功滚筒传动连接,如将行走机构的履带与测功滚筒传动连接,启动行走机构,使履带转动,履带转动即能够带动滚筒转动,此时测功装置即可检测出掘进装备的行走机构的功率。
19.因此,本技术中的坡道试验台能够变角度的测量掘进装备的爬坡能力并且还能够测量掘进装备行走机构的制动力和功率,功能完善,模拟范围广,实用性强。
附图说明
20.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
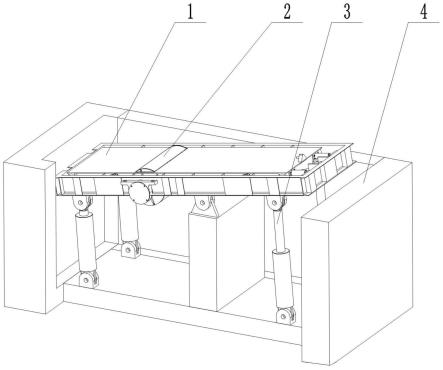
21.图1为本发明中提供的坡道试验台的结构示意图;
22.图2为本发明中提供的坡道试验台的基台和载物台的配合结构示意图;
23.图3为本发明中提供的坡道试验台的基台的机构示意图;
24.图4为本发明中提供的坡道试验台的载物台的结构示意图;
25.图5为本发明中提供的坡道试验台的测功装置的结构示意图。
26.图中:1、检测平台;2、测功装置;3、液压伸缩杆;4、地基;101、基台;102、载物台;1011、滑槽;1012、称重传感器;1013、螺栓;1014、导向轮;1015、轮轴;1016、制动力传感器;1017、角度传感器;1021、第一区域;1022、抵接杆;1023、牵引力传感器;201、测功传感器;202、固定法兰;302、测功滚筒。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.本发明的目的是提供一种坡道试验台,以解决上述现有技术存在的问题,能够改变坡道角度并扩大模拟范围。
29.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
30.本实施例提供一种坡道试验台,如图1-5所示,包括基台101、载物台102、测功装置2和角度调节装置,基台101与角度调节装置连接,角度调节装置用于调节并锁定基台101相对水平面倾斜的角度,测功装置2包括测功滚筒302,测功滚筒302与基台101转动连接,载物台102设置在基台101上,基台101用于支撑载物台102,载物台102上开设有用于避让测功滚筒302且被测功滚筒302穿过的开口,载物台102滑动设置在基台101上,基台101的一端固定设置有制动力传感器1016,基台101上设置有限位装置,限位装置用于限制载物台102向远离制动力传感器1016的方向滑动,载物台102能够向靠近制动力传感器1016的方向滑动并与制动力传感器1016抵接。本实施例中的坡道试验台还能够检测掘进装备的制动力,测试时,将掘进装备放置在载物台102的第二区域上,启动掘进装备的行走机构使掘进装备在第二区域内沿载物台102的滑动方向并且朝向制动力传感器1016的方向移动,此时虽然行走机构对载物台102进行施力,但是由于限位装置的作用,载物台102不会滑动。在掘进装备开始行走后,开始制动,此时因为掘进装备的惯性,会带动载物台102向制动力传感器1016的方向滑动并与制动力传感器1016撞击,此时制动力传感器1016受到的载物台102的撞击的推力即为掘进装备的行走机构的制动力。测试时,首先将掘进装备放置在载物台102的远离测功滚筒302的一端上,使掘进装备在载物台上行走,在掘进装备开始行走后,此时虽然行走机构对载物台进行施力,但是由于限位装置的作用,载物台不会滑动,行走后开始制动,此时因为掘进装备的惯性,会带动载物台向制动力传感器的方向滑动并与制动力传感器撞击,此时制动力传感器受到的载物台的撞击的推力即为掘进装备的行走机构的制动力。
31.进一步的,载物台102设置在基台101上,基台101用于支撑载物台102,使用角度调节装置调节基台101相对水平面倾斜的角度,从而能够调节载物台102相对水平面倾斜的角度,不断增大载物台102相对水平面倾斜的角度,观察掘进设备开始溜车时载物台102相对水平面倾斜的角度,即可检测出掘进装备在多大角度的坡度内不会溜车,即掘进设备的爬坡能力。
32.进一步的,将掘进装备移动至测功滚筒302上,使掘进装备的行走机构的行走零部件与测功滚筒302传动连接,如将行走机构的履带与测功滚筒302传动连接,启动行走机构,使履带转动,履带转动即能够带动测功滚筒302转动,此时测功装置2即可检测出掘进装备的行走机构的功率。
33.因此,本技术中的坡道试验台能够变角度的测量掘进装备的爬坡能力并且还能够测量掘进装备行走机构的制动力和功率,功能完善,模拟范围广,实用性强。本实施例中的载物台102和基台101组合构成检测平台1。
34.本实施例中,坡道试验台还包括称重传感器1012,称重传感器1012用于固定设置在基台101上,载物台102设置在称重传感器1012上,称重传感器1012用于完全支撑载物台102。称重传感器1012设置在基台101与载物台102之间并且载物台102完全由称重传感器1012支撑,因此,称重传感器1012能够检测出载物台102上的物品的重量。检测时,先使用角度调节装置将载物台102调平,再将需要测量的部件,如掘进装备或单独的掘进装备中的行走机构放置在载物台102上,称重传感器1012即可检测到载物台102上的物品的重量,其中,可以现将称重传感器1012归零,这样称重传感器1012检测出来的重量即为被检测物品的重量。本实施例中使用螺栓1013将称重传感器1012与基台101固定连接。
35.本实施例中,载物台102的远离测功滚筒302的一端固定设置有牵引力传感器1023。测试时,将掘进装备与牵引力传感器1023固定连接,启动掘进装备的行走机构,此时掘进装备会对牵引力传感器1023产生作用力,牵引力传感器1023即能够检测到掘进装备对牵引力传感器1023的作用力,这个作用力即为掘进装备的行走机构的牵引力。
36.本实施例中的一个优选方案为:载物台102为长方形,将长方形的载物台102分为第一区域1021和第二区域,第一区域1021用于测功,在第一区域1021内开设用于避让且被测功装置2的测功滚筒302通过的开口,将测功滚筒302转动的设置在第一区域1021的下方,并且测功滚筒302的侧面能够凸出于第一区域1021的表面,这样的结构使得当掘进装备的行走机构进入到第一区域1021时,行走机构的行走部件如履带,行走轮等能够与测功滚筒302连接并传动以实现测功,测功装置2选用本领域常用的带有测功滚筒302的测功装置2即可。
37.在第二区域中,固定设置有牵引力传感器1023,牵引力传感器1023可以采用拉力测试方式或推力测试方式,采用拉力测试方式将牵引力传感器1023与掘进装备的行走机构固定连接,启动行走机构向远离牵引力传感器1023的方向移动即可;采用推力测试方式的牵引力传感器1023时,采用刚性材料将牵引力传感器1023与行走机构刚性连接,或者直接使用行走机构与牵引力传感器1023抵接,启动行走装置向靠近牵引力传感器1023的方向行进,即可测量出掘进装备的行走机构的牵引力。
38.掘进装备的行走机构的爬坡能力仍在第二区域中测试,测试时断开掘进装备与牵引力传感器1023的连接,使用角度调节装置调节基台101相对水平面倾斜的角度,记录掘进装备开始溜车时的载物台102相对水平面倾斜的角度,即可检测出掘进装备在多大角度的坡度内不会溜车,即掘进设备的爬坡能力。本实施例中相对水平面倾斜的角度调节装置只要是能够带动基台101转动的机构均可。如能够伸缩的伸缩机构,使用时,将基台101与地面或其他地基4转动连接,将伸缩机构的一端与基台101转动连接,将伸缩机构的另一端与上述的地面或地基4连接,各转动连接的转动轴线均平行且不共线,且伸缩机构在伸缩运动时能够带动基台101转动。本实施例中的伸缩机构只要是能实现上述带动基台101转动的机构均可,如螺纹伸缩杆或液压伸缩杆3。
39.本实施例中,载物台102滑动设置在称重传感器1012上,基台101远离测功滚筒302的一端固定设置有制动力传感器1016,基台101上设置有限位装置,限位装置用于限制载物台102向远离制动力传感器1016的方向滑动,载物台102能够向靠近制动力传感器1016的方向滑动并与制动力传感器1016抵接。本实施例中的坡道试验台还能够检测掘进装备的制动力,测试时,将掘进装备放置在载物台102的第二区域上,启动掘进装备的行走机构使掘进
装备在第二区域内沿载物台102的滑动方向并且朝向制动力传感器1016的方向移动,此时虽然行走机构对载物台102进行施力,但是由于限位装置的作用,载物台102不会滑动。在掘进装备开始行走后,开始制动,此时因为掘进装备的惯性,会带动载物台102向制动力传感器1016的方向滑动并与制动力传感器1016撞击,此时制动力传感器1016受到的载物台102的撞击的推力即为掘进装备的行走机构的制动力。
40.本实施例中优选在基台101上开设滑槽1011,载物台102在滑槽1011中滑动,滑槽1011的远离制动力传感器1016的一端的侧壁即为限位装置,制动力传感器1016也设置在滑槽1011的侧壁上。
41.本实施例中,坡道试验台还包括导向轮1014,导向轮1014与基台101转动连接,导向轮1014的边缘与载物台102的侧面抵接并限制载物台102仅能够向远离或者靠近制动力传感器1016的方向滑动。因此导向轮1014能够为载物台102的滑动导向。本实施例中优选将载物台102的与滑动方向平行的两个侧边上向下即向滑槽1011底部的方向固定设置导向板,将导向轮1014的轮轴1015固定设置在基台101上,导向轮1014的轮盘边缘与导向板转动连接。
42.本实施例中,坡道试验台还包括角度传感器1017,角度传感器1017固定设置在基台101上。此时角度传感器1017即能够检测出基台101相对水平面倾斜的角度,也就是载物台102相对水平面倾斜的角度,无需人工记录角度,便于操作。
43.本实施例中,坡道试验台还包括角度传感器1017还包括多个举升装置,举升装置固定设置在载物台102上,多个举升装置绕开口边缘排布设置。测功时,当掘进装备自带举升装置时,可用自带的举升装置将掘进装备举升,使行走机构的行走部,如履带等,仅与测功滚筒302接触,避免履带与其他地方接触导致功率损失。当掘进装备没有自带举升装置时,即可采用本方案中的举升装置将掘进设备举升以实现上述使行走机构的行走部,如履带等,仅与测功滚筒302接触,避免履带与其他地方接触导致功率损失。
44.本实施例中,测功装置2还包括测功传感器201和固定法兰202,测功滚筒302的轴用于与固定法兰202的内沿转动连接,固定法兰202的外沿用于与基台101固定连接,测功传感器201的输入端用于与测功滚筒302的轴固定连接。本实施例中的测功传感器201通过测功滚筒302能够检测行走机构的转速和力矩,从而获取到功率。
45.本实施例中,测功滚筒302的径向侧面固定设置有用于与履带配合的筋条。筋条与履带配合,能够防止履带与测功滚筒302打滑,提高检测的准确性。
46.本实施例中优选角度调节装置为伸缩机构,还包括地基4,基台101与地基4绕第一轴线转动连接,伸缩机构的一端与地基4绕第二轴线转动连接,伸缩机构的另一端与基台101绕第三轴线转动连接,第一轴线、第二轴线与第三轴线均相互平行且不共线,伸缩机构伸缩能够调节基台101相对水平面倾斜的角度。本实施例中的伸缩机构优选为液压伸缩杆3,液压伸缩杆3伸缩即可带动基台101转动,实现基台101相对水平面倾斜的角度调节。
47.本实施例中优选基台101的中部与地基4转动连接,基台101的两端各设置有两个液压伸缩杆3。
48.本实施例中优选载物台102在靠近制动力传感器1016的一端固定设置有抵接杆1022,抵接杆1022用于与制动力传感器1016抵接。
49.本实施例中,坡道试验台还包括信息处理器和显示器,信息处理器用于与各传感
器如牵引力传感器1023、称重传感器1012以及制动力传感器1016、角度传感器1017和测功传感器201通信连接,信息处理器还与显示器通信连接,信息处理器用于获取牵引力传感器1023检测到的牵引力信息、称重传感器1012检测到的重量信息、制动力传感器1016检测到的制动力信息、角度传感器1017检测到的基台4与水平面的角度信息和测功传感器201检测到的功率信息,并且将获取到的所有信息进行处理后传递至显示器上显示出各传感器检测到的信息参数,便于直观的获取到各传感器检测到的对应的参数。
50.本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。