1.本发明涉及垃圾处理领域,尤其涉及一种自动清理缠绕的厨余垃圾破碎设备。
背景技术:
2.厨余垃圾是指家庭、农贸市场、水果蔬菜批发市场等丢弃的果蔬及食物下脚料、剩菜剩饭、瓜果皮等易腐有机垃圾,主要包括米和面粉类食物残余、蔬菜、植物油、动物油、肉骨、鱼刺等,其化学组份主要为淀粉、纤维素、蛋白质、脂类和无机盐等。
3.破碎机破碎厨余垃圾的过程中,厨余垃圾中的纺织物等易缠绕物会缠绕到破碎机的转动滚筒和刀片上,造成破碎腔减小,引起堵塞,甚至出现卡机的现象,一般需要停机,由人工进入破碎腔清理堵塞,工作空间有限,而且环境恶劣,工作劳动强度大。因此,亟需一种能解决破碎机缠绕问题的破碎设备。
技术实现要素:
4.(一)要解决的技术问题
5.本发明提供了一种自动清理缠绕的厨余垃圾破碎设备,旨在解决破碎机缠绕的问题。
6.(二)技术方案
7.为了解决上述问题,本发明提供了一种自动清理缠绕的厨余垃圾破碎设备,所述厨余垃圾破碎设备包括:破碎箱、破碎筒、刀片、主轴以及剪叉机构;
8.所述主轴转动设置在所述破碎箱内,且所述主轴上滑动设置有滑块,所述滑块能够沿着所述主轴的轴向运动且不能够沿所述主轴转动;
9.所述破碎筒沿自身圆周方向分为多个弧形破碎板,所述弧形破碎板能够依次连接形成破碎筒,所述弧形破碎板的内表面均通过剪叉机构与所述主轴连接,所述弧形破碎板的外表面上设置有所述刀片;
10.所述剪叉机构包括两根交叉设置且相互铰接交叉杆,其中:所述剪叉机构中的第一根交叉杆的一端与所述弧形破碎板的内表面滑动连接,且第一根所述交叉杆(51)能够与所述弧形破碎板(21)相对转动,交叉杆的另一端与所述主轴铰接;所述剪叉机构中的第二根交叉杆的一端与所述弧形破碎板的内表面铰接,第二根交叉杆的另一端与所述滑块铰接;
11.所述滑块在沿所述主轴运动时能够通过所述剪叉机构控制所述弧形破碎板沿所述破碎筒的径向运动进而相互分离或相互连接。
12.优选地,所述厨余垃圾破碎设备还包括:锯片和锯座;
13.所述锯座固定设置在所述主轴上,所述锯片位于所述破碎筒内且所述锯片的刀刃朝向相邻的两个所述弧形破碎板的交接处,靠近所述锯片的第一端处固定设置有第一滑动杆,所述锯片的第二端处固定设置有第二滑动杆;所述第一滑动杆与所述滑块滑动连接,所述第二滑动杆滑动设置在所述锯座内,所述滑块能够推动所述锯片沿所述破碎筒的径向运
动,且所述锯片的刀刃伸出所述破碎筒。
14.优选地,所述锯座包括相互平行的两块锯板,所述锯板上均设置有滑动斜槽,所述第二滑动杆上设置有与所述滑动斜槽对应的滑动孔,所述第二滑动杆设置在两块所述锯板之间,所述第二滑动杆能够沿所述滑动斜槽滑动。
15.优选地,所述滑动孔和所述滑动斜槽通过滑动轴连接,所述滑动轴能够穿过所述滑动斜槽和所述滑动孔,所述滑动轴能够沿所述滑动斜槽运动。
16.优选地,所述滑动斜槽的第一端与所述滑块的距离小于所述滑动斜槽的第二端与所述滑块的距离,所述滑动斜槽的第一端和第二端为所述滑动斜槽上相对的两端,所述滑动斜槽的第一端为靠近所述主轴的一端,所述滑动斜槽的第二端为靠近所述锯片的一端。
17.优选地,所述滑块沿所述破碎筒的径向方向设置有导向槽,所述第一滑动杆滑动设置在所述导向槽内。
18.优选地,所述锯片相对于所述主轴平行设置有挡污板,所述挡污板与所述锯片垂直,当所述锯片伸出所述破碎筒后,所述挡污板能够与相邻的两个弧形破碎板的内表面贴合。
19.优选地,所述主轴上还设置有驱动盘,所述驱动盘套设在所述主轴上,所述驱动盘上沿所述主轴的轴向方向凸出设置有螺纹连接部,所述螺纹连接部上设置有外螺纹,所述滑块上设置有与所述螺纹连接配合的内螺纹孔,所述驱动盘能够绕所述主轴转动不能够沿所述主轴滑动。
20.优选地,所述破碎箱上设置有垃圾进口,所述破碎筒位于所述垃圾进口一侧的下方,所述破碎箱内设置有调整机构和调整板,所述调整板转动设置在所述破碎箱内,所述调整板位于所述垃圾进口另一侧的下方,所述调整机构能够调整所述调整板与所述刀片的距离。
21.优选地,所述破碎箱上设置有垃圾出口,所述破碎箱内还转动设置有转盘,所述转盘能够控制所述垃圾出口的开闭。
22.(三)有益效果
23.本发明通过滑块在主轴上的轴向运动,带动弧形破碎板沿破碎筒的径向运动,此时多个弧形破碎板相互分离,弧形破碎板之间的距离增大,进而使得缠绕在破碎筒上的缠绕物断裂或者破碎筒上的缠绕物与破碎筒分离。此外,当弧形破碎板运动时,弧形破碎板上的刀片也会切割缠绕其自身的缠绕物,提高了缠绕物断裂的效果,避免了缠绕物缠绕破碎筒和刀片情况发生。
附图说明
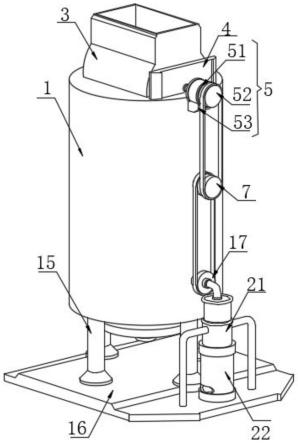
24.图1为本发明厨余垃圾破碎设备的剖视图;
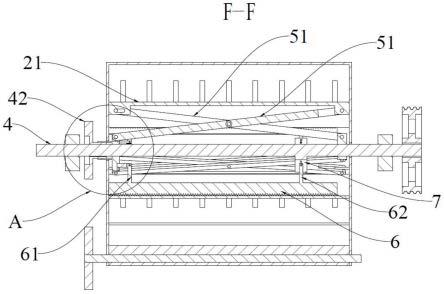
25.图2为图1在f-f处的截面图;
26.图3为图2在a处的放大图;
27.图4为本发明中弧形破碎版相互分离时的示意图;
28.图5为本发明中主轴、剪叉机构、破碎筒以及锯片的立体图;
29.图6为本发明中破碎筒上去掉一块弧形破碎板后的立体图。
30.【附图标记说明】
31.1:破碎箱;11:垃圾进口;12:调整机构;13:调整板;14:垃圾出口;15:转盘;2:破碎筒;21:弧形破碎板;3:刀片;4:主轴;41:滑块;42:驱动盘;5:剪叉机构;51:交叉杆;6:锯片;61:第一滑动杆;62:第二滑动杆;63:挡污板;7:锯座;71:锯板;72:滑动斜槽。
具体实施方式
32.为了更好地解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明作详细描述。
33.需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
34.另外,在本发明中如涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
35.在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
36.如图1至图6所示,本发明提供了一种自动清理缠绕的厨余垃圾破碎设备,厨余垃圾破碎设备包括:破碎箱1、破碎筒2、刀片3、主轴4以及剪叉机构5。
37.主轴4转动设置在破碎箱1内,且主轴4上滑动设置有滑块41,滑块41能够沿着主轴4的轴向运动,滑块41不能够与主轴4相对转动。破碎筒2沿自身圆周方向分为多个弧形破碎板21,弧形破碎板21能够依次连接形为筒状结构,弧形破碎板21的内表面均通过剪叉机构5与主轴4连接,弧形破碎板21的外表面上设置有刀片3。在正常工作过程中,主轴4通过剪叉机构5带动破碎筒2转动,进而带动刀片3转动,进而实现刀片3对厨余垃圾的破碎工作,此时剪叉机构5起到将主轴4的扭矩传递给破碎筒2的作用。
38.剪叉机构5包括两根交叉设置且相互铰接交叉杆51,其中:剪叉机构5中的第一根交叉杆51的一端与弧形破碎板21的内表面滑动连接,且第一根交叉杆51能够与弧形破碎板21相对转动,第一根交叉杆51的另一端与主轴4铰接,在具体的实施例中,第一根交叉杆51与弧形破碎板21的连接方式可以为:弧形破碎板21上设置有槽,槽的方向与主轴的方向一致,槽内滑动设置有滑动块,滑动块可以在槽内沿槽的方向运动,第一根交叉杆51与滑动块铰接;剪叉机构5中的第二根交叉杆51的一端与弧形破碎板21的内表面铰接,第二根交叉杆51的另一端与滑块41铰接。在本实施方案中,剪叉机构5中的第一根交叉杆51和第二根交叉杆51的铰接点均位于交叉杆51的两端之间,滑块41在主轴4上的轴向运动能够通过剪叉机构5带动弧形破碎板21沿破碎筒2的径向运动,即滑块41在沿主轴4运动时能够通过剪叉机构5控制弧形破碎板21沿破碎筒2的径向运动进而相互分离或相互连接。通过滑块41在主轴4上的轴向运动,带动弧形破碎板21沿破碎筒2的径向运动,此时多个弧形破碎板21相互分离,弧形破碎板21之间的距离增大,进而使得缠绕在破碎筒2上的缠绕物断裂或者破碎筒2
上的缠绕物与破碎筒2分离。此外,当弧形破碎板21运动时,弧形破碎板21上的刀片3也会切割缠绕其自身的缠绕物,提高了缠绕物断裂的效果,避免了缠绕物缠绕破碎筒2和刀片3情况发生。
39.在优选的实施方案中,主轴4上还设置有驱动盘42,驱动盘42套设在主轴4上,驱动盘42上沿主轴4的轴向方向凸出设置有螺纹连接部,螺纹连接部上设置有外螺纹,滑块41上设置有与螺纹连接配合的内螺纹孔,驱动盘42能够绕主轴4转动不能够沿主轴4滑动。在发生缠绕情况后,可以停止主轴4转动,驱动驱动盘42转动,驱动盘42上的螺纹连接部驱动滑块41沿主轴4的轴向运动,进而驱动剪叉机构5运动,实现自动清理缠绕物。在正常工作情况下,滑块41随着主轴4转动,此时滑块41上的内螺纹孔与螺纹连接部通过螺纹锁紧,滑块41和驱动盘42之间不存在相对转动,驱动盘42跟随滑块41转动,不影响厨余垃圾破碎设备的正常破碎工作。驱动盘42可以是齿轮。
40.进一步地,厨余垃圾破碎设备还包括:锯片6和锯座7。锯座7固定设置在主轴4上,锯片6位于破碎筒2内且锯片6的刀刃朝向相邻的两个弧形破碎板21的交接处,靠近锯片6的第一端处固定设置有第一滑动杆61,锯片6的第二端处固定设置有第二滑动杆62;第一滑动杆61与滑块41滑动连接,第二滑动杆62滑动设置在锯座7内,滑块能够推动锯片沿破碎筒的径向运动,且锯片6的刀刃伸出破碎筒2(即当弧形破碎板21沿破碎筒2的径向运动,多个弧形破碎板21相互分离,锯片6的刀刃凸出与弧形破碎板21的外表面)。在本实施方案中,考虑到厨余垃圾中会混入诸如垃圾袋、纺织物、绳索等柔性物质,当弧形破碎板21沿破碎筒2的径向运动,多个弧形破碎板21相互分离,弧形破碎板21之间的距离增大时,缠绕在弧形破碎板21上的物质仍然不断裂,此时锯片6在滑块41的作用下伸出破碎筒,锯片6的刀刃伸出破碎筒2起到切割柔性缠绕物的作用,提高了去缠绕的效果。第一滑动杆61和第二滑动杆62均设置在锯片6的刀背处。
41.在优选的实施方案中,锯座7包括相互平行的两块锯板71,锯板71上均设置有滑动斜槽72,第二滑动杆62上设置有与滑动斜槽72对应的滑动孔,第二滑动杆62设置在两块锯板71之间,将第二滑动杆62设置在两块锯板71之间避免了影响第二滑动杆62的滑动,第二滑动杆62能够沿滑动斜槽72滑动。具体的第二滑动杆62与锯座7的连接方式可以为:滑动孔和滑动斜槽72通过滑动轴连接,滑动轴能够穿过滑动斜槽72和滑动孔。滑动轴可以在滑动斜槽72内滑动,另外,滑动轴可以与第二滑动杆62、滑动斜槽72亦或是上述两者转动。
42.在更加优选的实施方案中,滑动斜槽72的第一端与滑块41的距离小于滑动斜槽72的第二端与滑块41的距离,滑动斜槽72的第一端和第二端为滑动斜槽72上相对的两端,滑动斜槽72的第一端为靠近主轴4的一端,滑动斜槽72的第二端为靠近锯片6的一端。通过上述设置能够保证在滑块41同时驱动弧形破碎板21和锯片6运动时(滑块41通过带动剪叉机构5中的第二根交叉杆51运动,进而通过剪叉机构5带动弧形破碎板21沿破碎筒2的径向运动。滑块41还能够推动锯片6沿破碎筒的径向运动),锯片6在破碎筒2的径向方向上的运动速度大于弧形破碎板21在破碎筒2的径向方向上的速度,进而使得锯片6的刀刃能够突出于弧形破碎板21的外表面,实现对缠绕物的切割效果。此外在滑块推动第一滑动杆时,由于滑动斜槽72为斜槽,所以会将滑块的沿主轴方向的运动转化为沿滑动斜槽72运动(此时存在一个沿破碎筒2径向运动的分运动),进而带动锯片6整体沿滑动斜槽运动进而伸出破碎筒对缠绕物进行切割。在优选的实施方案中,第一滑动杆61上与滑块41铰接的点到主轴4的距
离小于第二滑动杆62上与锯座7铰接的点到主轴4的距离。这使得滑块41在沿主轴运动时,能够推动第二滑动杆62沿滑动斜槽72朝破碎筒2外运动。
43.滑块41内沿所述破碎筒2的径向方向设置有导向槽,第一滑动杆62的一端滑动设置在所述导向槽内。此外。导向槽的方向还可以与滑动斜槽的方向关于主轴的径向对称,即导向槽的第一端与第二滑动杆的距离小于导向槽的第二端与第二滑动杆的距离,其中导向槽的第一端为导向槽上靠近主轴的一端,导向槽的第二端为导向槽上靠近锯片的一端。
44.更进一步地,锯片6相对于主轴4平行设置有挡污板63,挡污板63与锯片6垂直,当锯片6伸出破碎筒2后,挡污板63能够与相邻的两个弧形破碎板21的内表面贴合。本实施方案中,在相邻的两个弧形破碎板21沿破碎筒2的径向运动分离后,挡污板63能够更好地与相邻的弧形破碎板21贴合,使得相邻的两个弧形破碎板21之间的间隙得到挡污板63的填补,厨余垃圾不会掉落至破碎筒2内,保护了主轴4不会被厨余垃圾浸没,使得主轴4不会被过快的氧化,提高了主轴4的使用寿命。
45.最后,破碎箱1上设置有垃圾进口11,破碎筒2位于垃圾进口11一侧的下方,破碎箱1内设置有调整机构12和调整板13,调整板13转动设置在破碎箱1内,调整板13位于垃圾进口11另一侧的下方,调整机构12能够调整调整板13与刀片3的距离。调整机构12可以为液压缸,其中液压缸的一端与破碎箱1铰接,液压缸的另一端与调整板13铰接,通过液压缸控制调整板13的转动,调整调整板13与刀片3的间隙,用来确定破碎机的出料尺寸。破碎箱1上设置有垃圾出口14,破碎箱1内还转动设置有转盘15,转盘15能够控制垃圾出口14的开闭。当有杂物缠绕于破碎筒2上时,主轴4停止转动,使破碎设备停止工作,转盘15转动一定角度,使料从后端垃圾出口14排出,确保缠绕物不再进入物料中,造成对后端设备的影响。
46.综上,由于本技术主要是对厨余垃圾进行处理,厨余垃圾在处理的过程中会产生有害气体,如硫化氢、二氧化硫等,所以会在破碎箱1上安装吹气装置,其中吹气装置靠近垃圾进口设置,吹气装置能够向破碎箱内吹风,使得破碎箱内的有害气体能够及时的从垃圾出口14排出,破碎箱1内的有害气体的浓度得到控制,避免破碎箱1内的装置被腐蚀。
47.需要理解的是,以上对本发明的具体实施例进行的描述只是为了说明本发明的技术路线和特点,其目的在于让本领域内的技术人员能够了解本发明的内容并据以实施,但本发明并不限于上述特定实施方式。凡是在本发明权利要求的范围内做出的各种变化或修饰,都应涵盖在本发明的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。