技术特征:
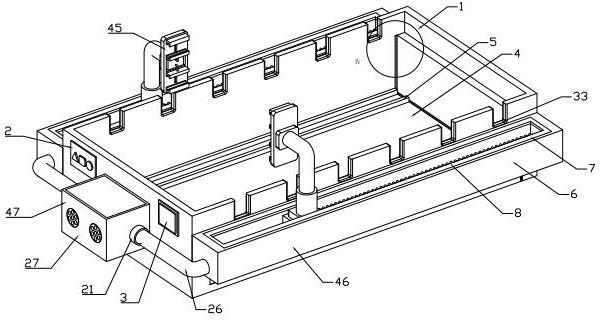
1.一种机械手视觉自动贴标方法,其特征在于:包括以下步骤:s1、产品b放置:将待撕去离型纸的多个产品b放入到斜式料仓机构上表面开设的放料槽中;s2、产品b取料:将放料槽中的产品b通过自动取料机构放置到自动撕离型纸机构中的取料平台上;s3、产品b离型纸去除:通过自动撕离型纸机构中的放胶带轮可将胶带释放并通过剥离板可将胶带外部的离型膜去除,并通过胶带与产品b外部的离型纸接触同时通过第二收卷轮可将产品b外部的离型纸去除;s4、产品a放置:将与产品b贴附的产品a放置到载具摆放台上;s5、产品a与产品b的贴附:将s3中去除离型纸的产品b通过ccd视觉机构自动拍照产品b的位置尺寸坐标,并通过机械手机构可将确定好位置的产品b吸附并贴附到产品a上,从而得到所需要的贴标产品;s6、完成工作:将s5中贴附后好的贴标产品在通过机械手机构吸附放到输出圆皮带线上,以此类推,进行实现循环工作来进行贴标工作。2.如权利要求1所述的一种机械手视觉自动贴标方法,其特征在于:所述在步骤s1中放料槽设置有传感器,通过传感器可用于补料提示,以实现持续工作。3.如权利要求1所述的一种机械手视觉自动贴标方法,其特征在于:所述在步骤s4中载具摆放台内设置有真空吸管,并通过传感器可控制真空泵工作通过真空吸管并将载具摆放台抽真空。4.如权利要求1所述的一种机械手视觉自动贴标方法,其特征在于:所述在步骤s5中ccd视觉机构包括光源盘、镜头和相机,所述相机安装在镜头的下方,所述光源盘设置在镜头的上方。5.如权利要求1所述的一种机械手视觉自动贴标方法,其特征在于:所述在步骤s5中机械手机构包括机械手底座、四轴机械手和产品吸盘,所述四轴机械手设置在机械手底座上,所述产品吸盘与四轴机械手连接。6.如权利要求1所述的一种机械手视觉自动贴标方法,其特征在于:所述在步骤s2中自动撕离型纸机构包括压滚轮、取料平台、剥离板、第一收卷轮、放胶带轮、固定架、第二收卷轮、驱动电机和胶带驱动轮;所述压滚轮可将胶带与产品b外部的离型纸压紧,以便于后续的去除;所述取料平台可便于产品b的放置、离型纸去除;所述剥离板可便于胶带与胶带外部的离型膜分开去除;所述第一收卷轮可胶带外部的去除的离型膜收卷;所述放胶带轮可释放去除产品b外部的离型纸的胶带;所述固定架可将压滚轮、取料平台、剥离板、第一收卷轮、放胶带轮等结构进行安装;所述第二收卷轮可将胶带与产品b外部的离型纸进行收卷;所述驱动电机可为第一收卷轮、第二收卷轮以及放胶带轮和胶带驱动轮提供运行;所述胶带驱动轮可便于胶带的驱动传输。7.如权利要求1所述的一种机械手视觉自动贴标方法,其特征在于:所述斜式料仓机构、自动取料机构、自动撕离型纸机构、载具摆放台、ccd视觉机构和机械手机构均设置在工
作台上,并且工作台的外部设置有上机罩。8.如权利要求7所述的一种机械手视觉自动贴标方法,其特征在于:所述上机罩的前表面设置有显示器以及触摸屏,通过触摸屏可控制程序运行,并通过显示器进行显示。9.如权利要求7所述的一种机械手视觉自动贴标方法,其特征在于:所述工作台的下表面设置有下机架,所述下机架的前表面设置有放料平台,利用放料平台可便于产品a放置,以便于工作人员操作。
技术总结
本发明适用于产品贴标技术领域,提供了一种机械手视觉自动贴标方法,包括以下步骤:S1、产品B放置:S2、产品B取料:S3、产品B离型纸去除:通过自动撕离型纸机构中的放胶带轮可将胶带释放并通过剥离板可将胶带外部的离型膜除,并通过胶带与产品B外部的离型纸接触同时通过第二收卷轮可将产品B外部的离型纸去除;S4、产品A放置;S5、产品A与产品B的贴附;S6、完成工作。本发明将待撕去离型纸的产品B放入到斜式料仓机构中,通过自动取料机构可将产品B上料到撕去离型膜的胶带上,然后通过胶带撕去产品B上的离型纸,这样即可自动化的将产品B上的离型纸撕下,有效的提高工作效率,降低工作人员的劳动强度。的劳动强度。
技术研发人员:甄华全 李海意
受保护的技术使用者:昆山艾伯格机器人科技有限公司
技术研发日:2022.10.24
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。