技术特征:
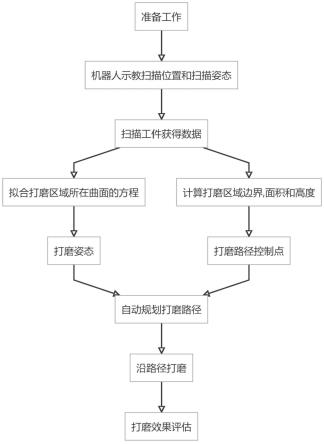
1.一种基于三维扫描仪的打磨算法,其特征在于,包括如下步骤:步骤1、准备工作,标定三维扫描仪坐标系;步骤2、机器人示教扫描位置和扫描姿态;步骤3、扫描工件获得数据;步骤4、拟合打磨区域所在平面或曲面方程,计算打磨区域边界,面积和高度;步骤5、计算打磨姿态,计算打磨路径控制点;步骤6、自动规划打磨路径,沿路经打磨;步骤7、打磨效果评估。2.根据权利要求1所述的基于三维扫描仪的打磨算法,其特征在于,所述步骤4还包括如下步骤:步骤41、根据三维扫描仪得到的三维数据,拟合打磨区域所在曲面方程或者平面方程表面方程;步骤42、根据三维扫描仪得到的三维数据,计算打磨区域边界和高度,计算边界的最小外接矩形或圆,计算外界矩形或圆的面积。3.根据权利要求2所述的基于三维扫描仪的打磨算法,其特征在于,所述步骤41还包括如下步骤:步骤411、对数据进行随机降采样;步骤412、使用降采样的数据拟合曲面方程或平面方程;步骤413、重复步骤11至12,获得多个曲面方程或平面方程。步骤414、用降采样之前的数据对所有拟合得到的曲面方程或平面方程逐一进行校验,获得拟合程度最好的方程,将这个方程作为打磨区域所在曲面方程或者平面方程表面方程。4.根据权利要求2所述的基于三维扫描仪的打磨算法,其特征在于,所述步骤42还包括如下步骤:步骤421、筛选出三维扫描仪得到的三维数据中z轴坐标值大于阈值的数据点,计算打磨区域边界和高度;步骤422、根据打磨区域边界,计算最小外接矩形或最小外接圆;步骤423、计算最小外接矩形或最小外接圆的面积。5.根据权利要求1所述的基于三维扫描仪的打磨算法,其特征在于,所述步骤5还包括如下步骤:步骤51、根据待打磨区域外接矩形或者外接圆规划砂轮打磨路径;步骤52、根据待打磨区域所在的曲面或平面的方程计算控制点邻域内曲面或平面的法向量,计算该控制点邻域内机器人打磨姿态,即机器人运行到控制点时的姿态。6.根据权利要求5所述的基于三维扫描仪的打磨算法,其特征在于,所述步骤51还包括:步骤511、根据外接矩形的面积或外接圆的面积,计算砂轮覆盖外接矩形面积所需要行进的最佳路径;步骤512、将最短路径分割为多个直线路径段,每个路径段就是对应的两个路径控制点之间的最短连线。
7.根据权利要求5所述的基于三维扫描仪的打磨算法,其特征在于,所述步骤52包括:根据待打磨区域所在的曲面的方程,计算路径控制点邻域内法向量,绘制法向量直方图,确定该控制点领域内占主导地位的法向量,根据该法向量计算机器人在控制点邻域内的打磨姿态。8.根据权利要求1所述的基于三维扫描仪的打磨算法,其特征在于,所述步骤7还包括如下步骤:扫描打磨区域,根据三维扫描仪得到的三维数据,计算区域内残余高度,若高度大于阈值,则重复进行步骤4至7。9.一种基于三维扫描仪的打磨装置,其特征在于,所述装置包括:第一预设单元,适于标定三维扫描仪坐标系;第二预设单元,适于机器人示教扫描位置和扫描姿态;第一输入单元,适于扫描工件获得数据;第一计算单元,适于拟合打磨区域所在曲面方程,计算打磨区域边界,面积和高度;第二计算单元,适于计算打磨姿态,计算打磨路径控制点;第一输出单元,适于自动规划打磨路径,沿路经打磨;第一判断单元,适于打磨效果评估。10.一种基于三维扫描仪的打磨用服务器,其特征在于,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其中,所述处理器执行所述程序时实现权利要求1-7任一项所述方法的步骤。
技术总结
本发明公开了一种基于三维扫描仪的打磨算法,属于机械加工领域。准备工作,标定三维扫描仪坐标系;机器人示教扫描位置和扫描姿态;扫描工件获得三维数据;使用三维数据拟合待打磨区域附件工件表面方程,计算待打磨区域边界、面积和高度;根据待打磨区域面积和打磨工艺参数规划路径,计算路径控制点,根据表面方程计算每个路径控制点附近机器人的打磨姿态;根据高度计算打磨次数,机器人沿着打磨路径、调整至打磨姿态进行打磨;打磨完毕后评估打磨效果。能够实现工件待打磨区域的平面磨和曲面磨,其中平面打磨能够达到高精度和高稳定性,曲面打磨能够实现打磨区域和工件本体之间平滑过度的打磨效果。滑过度的打磨效果。滑过度的打磨效果。
技术研发人员:王超 季天莹
受保护的技术使用者:中车戚墅堰机车车辆工艺研究所有限公司
技术研发日:2022.10.20
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。