1.本发明属于消防领域,尤其涉及一种用于仓库极早期火情干预的智能巡检机器人及其消防联动控制方法。
背景技术:
2.消防机器人自从问世以来,作为一种特种作业机器人,在辅助消防人员完成火情扑救,保护人民生命、财产安全的工作领域起到了相当大的作用。
3.在消防领域内,消防机器人大多是工作于室外,代替消防人员将高压喷水管道牵引至靠近火源的高温区域,由消防人员远程操控机器人的喷头方向、压力完成对火情发生区域的灭火动作。
4.但是,现有技术存在以下的缺陷和不足:
5.1、响应时间缺陷:传统的消防机器人人工干预过多,机器人本身不具备火情的即时发现功能,只是在消防人员已接收到消防任务后,辅助消防人员完成对火情的控制及消灭,因此,可能丧失在火情出现的早期即将其控制或消灭的机会,延长火情响应时间,易于错过最佳灭火时间。
6.2、工作能力缺陷:传统的消防机器人,一般是牵引高压喷头在室外完成灭火动作,依赖消防车的水箱及水泵提供水源及水压。但是,在脱离消防车的供水系统时,无法独立完成小规模的火情控制,而在火情发生初期,对小规模的火情,可能只需要简单的处理即可完成控制。因此传统的消防机器人依赖于外部供水系统,使得其使用范围受到限制,并且,无法完成极早的火情处理,功能受到很大的限制。
7.3、智能化水平不高:在易于发生火灾但不易全方位监控的区域,例如大型仓库,在传统的消防联动系统中,温升、烟雾、视频报警会起到火情感知的作用,但是这些传感器由于其布置安装位置的关系,往往存在死角、遮挡、反应速度慢等缺点,使得整个联动机制响应速度受到影响。对于传统的消防机器人而言,则是在上述传感器达到报警阈值后启动工作,但并不能将多个传感器的数据进行融合,或者加入火情巡视工作,使得联动的机制效率受限。
技术实现要素:
8.本发明所要解决的技术问题是提供一种仓库极早期火情干预智能巡检机器人及其消防联动控制方法。其利用及时定位、导航模块引导机器人在场区内行走、巡视;利用视觉识别模块完成及时火情的识别;自身携带有水箱和供水系统应对火情控制;同时具备自主行走、火情识别、火情控制的功能,在发生火情的时候,摆脱了对操作人员的依赖。
9.本发明的技术方案是:提供一种仓库极早期火情干预智能巡检机器人,其特征是:
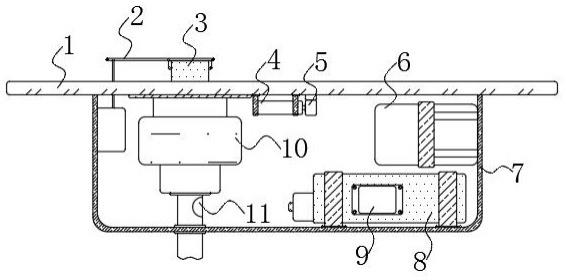
10.在机械结构上,智能巡检机器人包括一个由履带式行走装置驱动的底盘;在底盘的上部,设置有喷头回转机构,在喷头回转机构上设置有喷头俯仰机构,在喷头俯仰机构的
上端,设置有喷头;在底盘的前端设置有防跌落传感器;在底盘的上端设置有天线;在底盘的后端设置有状态指示灯;在底盘的上端设置有双视云台和激光扫描仪;在底盘的内部,设置有锂电池、水箱以及控制及通讯模块腔室;底盘由内置的底盘驱动电机;在在底盘的后部,设置有充电接口;
11.在系统构成上,智能巡检机器人包含下述模块:
12.1)底层控制模块:至少包含工控机、交换机以及核心板;
13.工控机用于对机器人所有下位机通讯数据完成融合打包、转发,以及对云台采集的图像信息进行存储和分析运算;交换机用于检测数据、导航数据、工控机数据的融合、交互,并且在工控机的指令下通过天线与数据融合层通讯;核心板用于对机器人本地的底层各个外设的驱动及数据通讯;
14.2)检测与识别模块:至少包含云台及所搭载的高清相机及红外热成像仪;
15.在云台的俯仰电机和回转电机的驱动下,高清相机和红外热成像仪能实现俯仰和回转动作;
16.3)导航与定位模块:由导航与定位控制器及激光扫描仪组成,为机器人提供实时定位与路径规划的功用;
17.4)底盘与行走模块:由履带轮系、伺服电机、驱动器、传感器组成;底盘采用伺服电机双驱控制,通过双电机的差速实现底盘行走、转向的功能;所述底盘与行走模块用于实现包括机器人行走、转向、越障在内的功能;
18.底盘上搭载有姿态传感器,用于实时监测机器人的位姿状态;搭载超声波传感器用于探测行进方向上是否有障碍物;搭载防跌落传感器用于防止机器人跌落;
19.5)喷水灭火模块:由喷射装置、移动转台、水泵及水箱组成;移动转台通过俯仰和回转2个电机驱动,通过回转及俯仰角度确定喷射方位坐标,由水泵的压力控制喷射距离,进而达到火情干预的目的;
20.6)无线通讯模块:由无线交换机、无线网桥、车载无线组成,能实现整个场地的无线网络全覆盖,其中车载无线置于机器人内部,无线交换机、无线网桥置于机器人外部
21.7)电源模块:由锂电池、电源管理模块、充电模块组成,锂电池为机器人提供能源;电源管理模块为机器人各用电外设进行电源分配,为充、放电电流予以保护,提供电量数据;充电模块用于机器人对接充电桩,对机器人进行充电。
22.进一步的,所述激光扫描仪的检测方向朝向底盘的前行方向。
23.具体的,所述智能巡检机器人的喷水灭火模块采用下列方法来控制压力阀门的开度:
24.1)通过高清相机及红外热成像仪,采集现场图像;
25.2)获取云台俯仰角度、云台回转角度以及景深;
26.3)进行喷水灭火参数计算;
27.4)确定射水回转角度、射水俯仰角度以及有效射程;
28.5)通过控制回转电机动作、俯仰电机动作以及压力阀门动作,建立喷水射程有效值与射水压力之间的关系,确定即时的射水压力值,用来控制压力阀门的开度。
29.进一步的,所述喷水灭火装置的射水回转角度、射水俯仰角度参数计算过程如下:
30.设定o1为云台水平回转中心,o2为喷水模块水平回转中心,r为高清相机回转半径,
s为云台回转中心至喷水模块回转中心的距离,d为云台回转中心至喷水模块回转中心的高差,s为云台回转中心至喷水模块回转中心的水平距离,l1为喷水模块射水有效水平距离,∠a1o2o1为喷水装置回转角度,h为喷水模块射水有效垂直高度,β1为喷水模块俯仰回转角度;
31.s.1.通过控制器读取云台状态变量:景深在水平面上投影l计算式如下:
32.l=ls
·
cosβ
33.其中ls为景深,α为云台回转角度,β为云台俯仰角度;
34.s.2.云台回转中心至火情发生点a1的距离l2计算式如下:
[0035][0036]
s.3.∠a1o1n计算式如下:
[0037]
∠a1o1n=arctan(l/r)
[0038]
s.4.∠a1o1o2计算式如下:
[0039]
∠a1o1o2=∠a1o1n α=arctan(l/r) α
[0040]
s.5.喷水模块射水有效水平距离l1计算式如下:
[0041][0042]
s.6.喷水装置回转角度∠a1o2o1计算公式如下:
[0043][0044]
s.7.相机景深在垂直面上的投影w1计算式如下:
[0045]
w1=ls
·
cosα
[0046]
s.8.喷水模块射水有效垂直高度h计算式如下:
[0047]
h=w1·
sinβ-d
[0048]
s.9.喷水模块俯仰回转角度β1计算式如下:
[0049][0050]
s.10.喷水灭火模块的喷水射程理论有效值sk计算式如下:
[0051][0052]
通过建立喷水射程有效值sk与射水压力p之间的关系,即可确定即时的射水压力值。
[0053]
本发明的技术方案,还提供了一种采用上述智能巡检机器人的极早期火情干预联动系统构架,其特征是所述极早期火情干预联动系统构架由终端应用层、数据融合层、中央控制层、指挥决策层4层构成;其中,
[0054]
在终端应用层中,智能巡检机器人作为层级中的一个重要组成部分,与布置在仓库内的火情传感器、灭火装置及火灾报警共同组成火情识别、报警、消灭的联动模式下的最终端的执行机构和感知机构;在终端应用层中,智能巡检机器人作为移动式的执行机构,用于弥补固定式火情传感器及灭火系统的不足;
[0055]
所述的数据融合层,包含数据交换平台和无线传输模块;
[0056]
数据交换平台用于对终端应用层所有感知数据及运动控制数据进行融合;感知数据包括机器人所拍摄的图像数据、红外热成像数据,火情传感器中温度传感器数据、烟雾传感器数据、固定式视频监控数据;运动控制数据包括机器人的位置、姿态、速度、故障信息,喷水灭火模块的方位、角度信息,检测识别模块的云台回转角度、俯仰角度信息;数据交换平台利用协议将上述数据打包之后传输给中央控制层;无线传输模块用于数据交换平台与机器人本体间建立无线通讯;
[0057]
所述中央控制层,是整个极早期火情消防联动的核心控制平台,包括服务器、数据存储模块以及人机交互界面;
[0058]
所述的指挥决策层由联动决策服务器和专家系统组成;
[0059]
联动决策服务器的作用是火情发生后,根据火情发生的位置、规模、危险源特性,决策适用哪一种灭火方案或哪几种联动灭火机制;专家系统是依据历史火情发生案例,为决策服务器提供联动机制参考。
[0060]
进一步的,所述的中央控制层包含以下功能:
[0061]
1)对所有火情感知传感器数据进行解析,通过对温度、图像、烟雾的信息进行运算判定火情;
[0062]
2)下发指令控制机器人完成例行巡检、特检、小规模火情控制;
[0063]
3)在需要联动消防作业的条件下,下发指令控制自动喷水灭火系统、气体自动灭火系统、其他自动灭火系统的开启;
[0064]
4)对机器人例行巡检、特检数据,火情感知传感器数据记录进行存储,提供历史数据信息;
[0065]
5)提供人机交互界面,便于运维人员了解仓库内的危险源状态、各传感器布置区域的潜在火灾状态、机器人工作状态;为运维人员提供机器人例行巡检、特检的操作服务。
[0066]
本发明的技术方案,还提供了一种按上述极早期火情干预联动系统构架的火情联动控制方法,其特征是所述的火情联动控制,是指在发生火情以后,终端应用层将火情状态传输至决策层,由决策层决策火情联动的机制;
[0067]
具体的火情联动控制方法包括:
[0068]
(1)极早期火情干预智能巡检机器人巡检工作方式:
[0069]
所述极早期火情干预智能巡检机器人按巡检的方式划分为自主巡检和特检两种工作模式;
[0070]
所述自主巡检,是指机器人在预设的规划路径上例行巡视、检测火情;
[0071]
所述特检,是指在仓库内,固定布置的火情感知传感器感知到有疑似火情发生时,对机器人下达特检指令,机器人到达火情感知传感器所处的实际位置,进行火情巡视、复测;
[0072]
(2)火情划分及联动消防策略:
[0073]
所述火情划分,是依据温度、烟雾程度、图像显示的着火面积,将火情划分为初期火情、小规模火情、大规模火情;
[0074]
所述联动消防策略,是依据上述划分的火情,决策层所采取的应对措施;
[0075]
具体的联动消防策略包括:
[0076]
①
初期火情消防策略:利用机器人直接控制,并警示消防人员利用手持灭火器等
措施协助直至火情消灭;
[0077]
②
小规模火情消防策略:利用机器人喷水降温控制,并警示消防人员利用仓库内的消防栓取水灭火,并进行火警报警;
[0078]
③
大规模火情消防策略:机器人远离火情发生区域,启动自动喷水灭火系统或气体自动灭火系统,并进行火警报警;
[0079]
(3)火情联动控制流程:
[0080]
整个联动控制流程以智能巡检机器人为核心;
[0081]
系统开启后,机器人以巡检方式在规划路径上巡视,进行火情的监测与采集,当疑似火情发生后,将火情发生的图像、温度位置等信息发送给指挥决策层,按照所述火情划分及联动消防策略由指挥决策层进行消防决策,并启动相应的应急响应,根据火情规模完成火情控制及灭火工作;
[0082]
系统开启后,安装在仓库区域内的固定式火情感知传感器开始工作,当固定式火情感知器检测到疑似火情发生的情况时,将传感器所感知的位置信息发送至机器人,机器人切换至特检模式,到达疑似火情发生位置,开启火情检测与数据采集,当确定有火情发生之后,将火情发生的图像、温度位置等信息发送给指挥决策层,按照所述火情划分及联动消防策略由指挥决策层进行消防决策,并启动相应的应急响应,根据火情规模完成火情控制及灭火工作。
[0083]
进一步的,所述的消防联动消防策略,还需要根据专家系统所提供的消防联动建议进行应急响应。
[0084]
本发明的技术方案,又提供了一种上述极早期火情干预联动系统构架的消防联动控制方法,其特征是:
[0085]
所述的机器人采用分层式的架构模式,将温升、烟雾、视频等固定位置的火灾报警传感器与机器人自身的巡检用图像数据进行融合,即固定式的重点监控数据与移动式的巡检数据融合,通过无线通讯,集中至中央控制层,用于火情预警、火情报警、灾情评估、应急方案决策、消防联动响应,针对不同的火情规模,选择相应的消防联动响应机制,提高消防工作效率,缩短消防工作响应时间。
[0086]
与现有技术比较,本发明的优点是:
[0087]
1.本技术方案中,机器人利用及时定位、导航模块引导机器人在场区内行走、巡视;利用视觉识别模块完成及时火情的识别;机器人自身携带有水箱和供水系统应对火情控制;机器人同时具备自主行走、火情识别、火情控制的功能,在发生火情的时候,摆脱了对操作人员的依赖;
[0088]
2.本技术方案中,根据机器人自身的带载能力,配置有对应的水箱和供水系统,与传统的消防机器人相比,不需要额外的供水系统、水箱等硬件,利用机器人自身即可应对初期火情或小规模火情的控制;
[0089]
3.本技术方案中,机器人采用分层式的架构模式,将温升、烟雾、视频等固定位置的火灾报警传感器与机器人自身的巡检用图像数据进行融合,即固定式的重点监控数据与移动式的巡检数据融合,通过无线通讯,集中至中央控制层,用于火情预警、火情报警、灾情评估、应急方案决策、消防联动响应,针对不同的火情规模,选择相应的消防联动响应机制,有利于提高消防工作效率,缩短消防工作响应时间。
附图说明
[0090]
图1是本发明极早期火情干预智能巡检机器人模块组成示意图;
[0091]
图2a和图2b是本发明极早期火情干预智能巡检机器人本体结构示意图;
[0092]
图3是本发明极早期火情干预联动系统构架原理示意图;
[0093]
图4是本发明极早期火情干预智能巡检机器人本体喷水灭火模块控制原理示意图;
[0094]
图5是本发明极早期火情干预智能巡检机器人本体喷水灭火模块水平面几何关系示意图;
[0095]
图6是本发明极早期火情干预智能巡检机器人本体喷水灭火模块垂直面几何关系示意图;
[0096]
图7是本发明极早期火情干预消防联动控制流程方框图。
[0097]
图中1为喷头回转机构,2为喷头俯仰机构,3为喷头,4为防跌落传感器,5为天线,6为状态指示灯,7为底盘,8为双视云台,9为激光扫描仪,10为锂电池,11为水箱,12为控制及通讯模块腔室,13为底盘驱动电机,14为充电接口。
具体实施方式
[0098]
下面结合附图和实施例对本发明做进一步说明。
[0099]
本专利采用的技术方案如下:
[0100]
1.极早期火情干预智能巡检机器人模块组成:
[0101]
如图1所示,所述极早期火情干预智能巡检机器人从系统构成上而言,包含下述模块:
[0102]
(1)底层控制模块:
[0103]
所述底层控制模块主要包含工控机、交换机、核心板。
[0104]
工控机用于对机器人所有下位机通讯数据完成融合打包、转发,以及对云台采集的图像信息进行存储和分析运算;交换机用于检测数据、导航数据、工控机数据的融合、交互,并且在工控机的指令下通过天线与数据融合层通讯;核心板用于对机器人本地的底层各个外设的驱动及数据通讯。
[0105]
(2)检测与识别模块:
[0106]
所述检测与识别模块主要包含云台及所搭载的高清相机及红外热成像仪.
[0107]
在云台的俯仰电机和回转电机的驱动下,高清相机和红外热成像仪能实现俯仰和回转动作。
[0108]
(3)导航与定位模块:
[0109]
所述导航与定位模块为机器人提供实时定位与路径规划的功用,由导航与定位控制器及激光扫描仪组成。
[0110]
(4)底盘与行走模块:
[0111]
所述底盘与行走模块用于实现机器人行走、转向、越障等功能。
[0112]
主要由履带轮系、伺服电机、驱动器、传感器组成。底盘采用伺服电机双驱控制,通过双电机的差速实现底盘行走、转向的功能。
[0113]
底盘上搭载有姿态传感器,用于实时监测机器人的位姿状态;搭载超声波传感器
用于探测行进方向上是否有障碍物;搭载防跌落传感器用于防止机器人跌落。
[0114]
(5)喷水灭火模块:
[0115]
所述喷水灭火模块由喷射装置、移动转台、水泵及水箱组成,移动转台通过俯仰和回转2个电机驱动,通过回转及俯仰角度确定喷射方位坐标,由水泵的压力控制喷射距离,进而达到火情干预的目的。
[0116]
(6)无线通讯模块:
[0117]
所述无线通讯模块由无线交换机、无线网桥、车载无线组成,能实现整个场地的无线网络全覆盖,其中车载无线置于机器人内部,无线交换机、无线网桥置于机器人外。
[0118]
(7)电源模块:
[0119]
所述电源模块由锂电池、电源管理模块、充电模块组成,锂电池为机器人提供能源;电源管理模块为机器人各用电外设进行电源分配,为充、放电电流予以保护,提供电量数据;充电模块用于机器人对接充电桩,对机器人进行充电。
[0120]
整个极早期火情干预智能巡检机器人的外形结构及内部装置布局如图2a及图2b中所示。
[0121]
其中,整个极早期火情干预智能巡检机器人包括一个由履带式行走装置驱动的底盘7,在底盘的上部,设置有喷头回转机构1,在喷头回转机构上设置有喷头俯仰机构2,在喷头俯仰机构的上端,设置有喷头3。
[0122]
在底盘的前端设置有防跌落传感器4,在底盘的上端设置有天线5,在底盘的后端设置有状态指示灯6。
[0123]
在底盘的上端设置有双视云台8和激光扫描仪9,激光扫描仪的检测方向朝向底盘的前行方向。
[0124]
在底盘的内部,设置有锂电池10,水箱11以及控制及通讯模块腔室12。
[0125]
底盘内,内置有底盘驱动电机13;在底盘的后部,设置有充电接口14。
[0126]
2.极早期火情干预联动系统构架:
[0127]
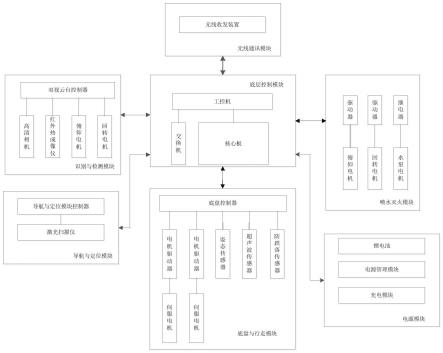
如图3所示,极早期火情干预联动系统的构架分为终端应用层、数据融合层、中央控制层、指挥决策层4层。
[0128]
(1)终端应用层:
[0129]
在终端应用层中,机器人作为层级中的一个重要组成部分,与布置在仓库内的火情传感器、灭火装置及火灾报警共同组成火情识别、报警、消灭的联动模式下的最终端的执行机构和感知机构。
[0130]
在终端应用层中,机器人作为移动式的执行机构,极大弥补了固定式火情传感器及灭火系统的不足。
[0131]
(2)数据融合层:
[0132]
所述数据融合层,包含数据交换平台和无线传输模块,数据交换平台用于对终端应用层所有感知数据及运动控制数据进行融合。感知数据包括机器人所拍摄的图像数据、红外热成像数据,火情传感器中温度传感器数据、烟雾传感器数据、固定式视频监控数据。运动控制数据包括机器人的位置、姿态、速度、故障信息,喷水灭火模块的方位、角度信息,检测识别模块的云台回转角度、俯仰角度信息。数据交换平台利用协议将上述数据打包之后传输给中央控制层。无线传输模块用于数据交换平台与机器人本体间建立无线通讯。
[0133]
(3)中央控制层:
[0134]
所述中央控制层,是整个极早期火情消防联动的核心控制平台,主要由服务器、数据存储模块、人机交互界面组成,其作用包含以下几个方面:
[0135]
①
对所有火情感知传感器数据进行解析,通过对温度、图像、烟雾的信息进行运算判定火情;
[0136]
②
下发指令控制机器人完成例行巡检、特检、小规模火情控制;
[0137]
③
在需要联动消防作业的条件下,下发指令控制自动喷水灭火系统、气体自动灭火系统、其他自动灭火系统的开启;
[0138]
④
对机器人例行巡检、特检数据,火情感知传感器数据记录进行存储,提供历史数据信息;
[0139]
⑤
提供人机交互界面,便于运维人员了解仓库内的危险源状态、各传感器布置区域的潜在火灾状态、机器人工作状态;为运维人员提供机器人例行巡检、特检的操作服务。
[0140]
(4)指挥决策层:
[0141]
所述指挥决策层由联动决策服务器和专家系统组成,联动决策服务器的作用是火情发生后,根据火情发生的位置、规模、危险源特性,决策适用哪一种灭火方案或哪几种联动灭火机制。专家系统是依据历史火情发生案例,为决策服务器提供联动机制参考。
[0142]
3.极早期火情干预智能巡检机器人本体喷水灭火模块控制原理:
[0143]
所述极早期火情干预智能巡检机器人本体喷水灭火模块是指安装在机器人本体上的喷水灭火装置,该装置主要用于机器人巡检、特检过程中所发生的初期火情或小规模可控火情的控制。其控制原理如图4所示。
[0144]
在本技术方案中,喷水灭火装置的回转及俯仰参数计算过程如下:
[0145]
参考图5,结构参数描述如下:o1为云台水平回转中心,o2为喷水模块水平回转中心,r为高清相机回转半径,s为云台回转中心至喷水模块回转中心的距离。
[0146]
待求参数如下:l1—喷水模块射水有效水平距离,∠a1o2o1—喷水装置回转角度。
[0147]
s.1.通过控制器读取云台状态变量:ls—景深(mm),α—云台回转角度(rad),β—云台俯仰角度(rad)。景深在水平面上投影l计算式如下:
[0148]
l=ls
·
cosβ
[0149]
s.2.云台回转中心至火情发生点a1的距离l2计算式如下:
[0150][0151]
s.3.∠a1o1n计算式如下
[0152]
∠a1o1n=arctan(l/r)
[0153]
s.4.∠a1o1o2计算式如下
[0154]
∠a1o1o2=∠a1o1n α=arctan(l/r) α
[0155]
s.5.喷水模块射水有效水平距离l1计算式如下
[0156][0157]
s.6.喷水装置回转角度∠a1o2o1计算公式如下:
[0158]
[0159]
参考图6所示,结构参数描述如下:q1为云台俯仰回转中心,q2为喷水模块俯仰回转中心,d为两俯仰回转中心高差,s为两俯仰回转中心水平距离。待求参数如下:h—喷水模块射水有效垂直高度,β1—喷水模块俯仰回转角度。
[0160]
s.7.相机景深在垂直面上的投影w1计算式如下:
[0161]
w1=ls
·
cosα
[0162]
s.8.喷水模块射水有效垂直高度h计算式如下:
[0163]
h=w1·
sinβ-d
[0164]
s.9.喷水模块俯仰回转角度β1计算式如下:
[0165][0166]
s.10.喷水灭火模块的喷水射程理论有效值sk计算式如下:
[0167][0168]
通过建立喷水射程有效值sk与射水压力p之间的关系,即可确定即时的射水压力值,用来控制压力阀门的开度。
[0169]
4.火情联动控制方法:
[0170]
所述火情联动控制,是指在发生火情以后,终端应用层将火情状态传输至决策层,由决策层决策火情联动的机制。具体的控制方式介绍如下:
[0171]
(1)极早期火情干预智能巡检机器人巡检工作方式:
[0172]
所述极早期火情干预智能巡检机器人按巡检的方式划分为自主巡检和特检两种工作模式。
[0173]
所述自主巡检,是指机器人在预设的规划路径上例行巡视、检测火情;所述特检,是指在仓库内,固定布置的火情感知传感器感知到有疑似火情发生时,对机器人下达特检指令,机器人到达火情感知传感器所处的实际位置,进行火情巡视、复测。
[0174]
(2)火情划分及联动消防策略:
[0175]
所述火情划分,是依据温度、烟雾程度、图像显示的着火面积,将火情划分为初期火情、小规模火情、大规模火情。
[0176]
所述联动消防策略,是依据上述划分的火情,决策层所采取的应对措施。具体描述如下:
[0177]
①
初期火情消防策略:利用机器人直接控制,并警示消防人员利用手持灭火器等措施协助直至火情消灭。
[0178]
②
小规模火情消防策略:利用机器人喷水降温控制,并警示消防人员利用仓库内的消防栓取水灭火,并进行火警报警。
[0179]
③
大规模火情消防策略:机器人远离火情发生区域,启动自动喷水灭火系统或气体自动灭火系统,并进行火警报警。
[0180]
所述消防联动策略,还需要根据专家系统所提供的消防联动建议进行应急响应。
[0181]
(3)火情联动控制流程:
[0182]
参考图7,整个联动控制流程以极早期火情干预智能巡检机器人为核心。
[0183]
系统开启后,机器人以巡检方式在规划路径上巡视,进行火情的监测与采集,当疑
似火情发生后,将火情发生的图像、温度位置等信息发送给指挥决策层,按照所述火情划分及联动消防策略由指挥决策层进行消防决策,并启动相应的应急响应,根据火情规模完成火情控制及灭火工作。
[0184]
系统开启后,安装在仓库区域内的固定式火情感知传感器开始工作,当固定式火情感知器检测到疑似火情发生的情况时,将传感器所感知的位置信息发送至机器人,机器人切换至特检模式,到达疑似火情发生位置,开启火情检测与数据采集,当确定有火情发生之后,将火情发生的图像、温度位置等信息发送给指挥决策层,按照所述火情划分及联动消防策略由指挥决策层进行消防决策,并启动相应的应急响应,根据火情规模完成火情控制及灭火工作。
[0185]
本发明的技术方案,通过构建以极早期火情干预智能巡检机器人为核心的极早期火情干预联动系统构架,形成包括终端应用层、数据融合层、中央控制层、指挥决策层构成的4层功能性结构,采用分层式的架构模式,将温升、烟雾、视频等固定位置的火灾报警传感器与机器人自身的巡检用图像数据进行融合,实现固定式的重点监控数据与移动式的巡检数据相融合,通过无线通讯,集中至中央控制层,用于火情预警、火情报警、灾情评估、应急方案决策、消防联动响应,针对不同的火情规模,选择相应的消防联动响应机制,提高了消防工作效率,缩短了消防工作响应时间。
[0186]
本发明可广泛用于仓库火情监控及消防控制领域。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。